Hallo, nach der Zerlegung einiger PicooZ Helis, um an die Rotoren zu kommen, habe ich noch die Fernsteuerungen und die Empfängermodule übrig. Nun würde ich gerne diese IR-Fernsteuerung weiterbenutzen. Die Module haben jeweils ein Litzenpaar für den Hauptrotor und ein Litzenpaar für den Nebenrotor. Davon liegt immer eine Litze auf VCC, also der Akkuspannung, und die andere wird über einen kleinen Transistor auf VCC gezogen. Obgleich die Hebel an der Fernsteuerung etwas anderes andeuten, scheint der Hauptrotor nur AN oder AUS geschaltet werden zu können. Bei der Lenkung ist ständig ein Potential vorhanden (damit sich der Heli nicht in der Luft dreht) das dann erhöht oder verniedrigt wird. Nun möchte ich damit eine Fernsteuerung bauen, zum Anfang erstmal so, dass jeweils eine LED für Vollgas und jeweils eine LED für Links und Rechts aufleuchten, wenn die Hebel in die entsprechende Position gebracht werden. Also habe ich einfach mal ein Pullup über 1kOhm an die OpenCollector-Ausgänge der Steuerkanäle zu dem Pluspol des Akkus gezogen. Nun bekomme ich da ein Signal, das der Steuerposition entspricht, nur leider invertiert. Dann habe ich versucht, mit OpAmps (LM324) die Signale durch Komparatoren zu trennen. Bei dem Gashebel klappt das auch ganz wunderbar, nur bei der Lenkung komme ich nicht weiter. Ich habe eine Akkuspannung von 4V, davon kommen konstant etwa 2.2V aus dem Lenkausgang mit Pullup raus, wenn ich Vollgas gebe. Wenn ich nun den Lenkhebel bewege, steigt oder sinkt die Spannung um bis zu 0.5V. Ich habe also versucht mit einem Komparator da ein 0V/4V Signal draus zu machen, jedenfalls für eine Richtung. Allerdings leuchtet die LED nur unterschiedlich hell, und das auch, wenn ich in die "falsche" Richtung lenke. Dabei stelle ich den Spannungsteiler immer so ein, dass der Komparator bei der erhöhten Lenkspannung (2.2V + 0.5V) eigentlich HIGH ausgeben müsste. Weiß jemand was ich falsch mache? Sind 4V überhaupt genug für den LM324, denn ich speise ihn im Augenblick direkt aus dem Akku des Empfängers (50mAh LiPo)? Mit freundlichen Grüßen, Valentin Buck
Angehängte Dateien:
-

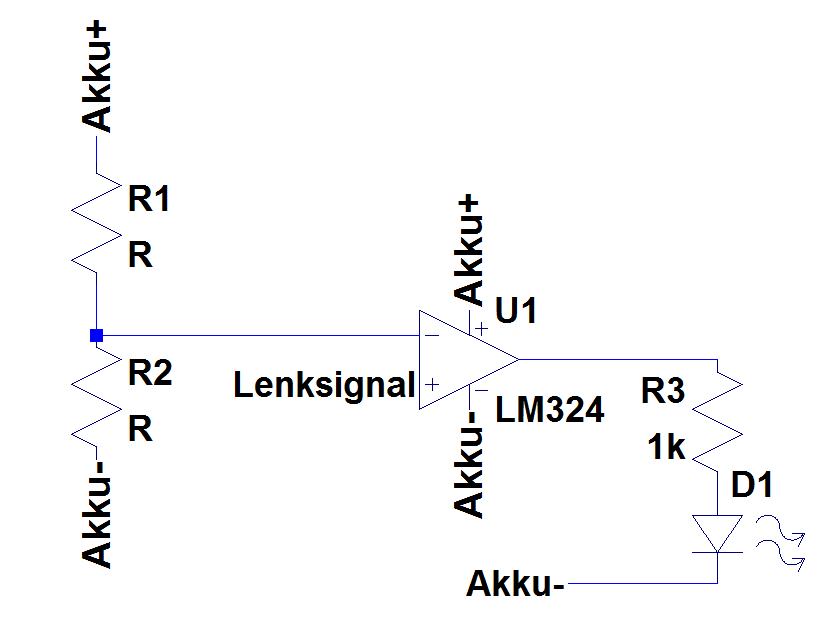
Schaltplan_Lenksignal.png
7,6 KB
Die Motorausgänge sind PWM-Moduliert (nur an/aus, aber mit unterschiedlichem Timing). Um das analog Auswerten zu können musst Du nach deinem Pull-Up erstmal noch z.B. ein R-C Tiefpass bilden. (oder gleich digital auswerten mit einem µC - vielleicht reicht auch ein Monoflop)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.