Hallo, ich habe meinen Joystick an den A/D Wandler meines uCs
angeschlossen. der Jostick ist intern folgendermaßen verschaltet:
Ein poti mit etwa 100KOhm, der aber nicht als Spannungsteiler
geschaltet
ist, sondern gegen 5V. (Danke liebe Leute, die sich diesen Standart
haben einfallen lassen)
Das bedeutet, dass ich extern einen Spannungsteiler bilden Muss, um
eine Variable Spannung zu erhalten.
Ich verwende Hierzu einen gegen Masse Geschalteten 100K Widerstand.
Ich hoffe auf dem "Bild" kann man was erkennen.
5V
|
| |Widerstand im Joystick
| |---|----------> Zum A/D Wandler
| | | |
| | | Mein Widerstand (100K)
| |
|
GND
Ich bekomme also eine Spannung zwischen 5 und 2,5 Volt.
Allerdings ist die Abhängigkeit nicht linear.
Ich bräuchte also einen Algorithmus, der das irgendwie ausgleicht.
Hab mir schon ansatzweise Gedanken gemacht, mir ist aber nichts
gescheites eingefallen.
Die Spannung am Wandler lässt sich jedenfalls durch die Gleichung
U= 100K * 5V
---------
R1 + 100K
Beschreiben.
kann ich jetzt, wenn ich den Wert am A/D Wandler ablese, über die
Gleichung
R1 = 100K *5V
-------- - 100K
U
Auf den ursprünglichen Widerstandswert zurückschliessen?
Soweit so gut (danke, dass du bis hierhingelsen hast).
Leider verwenden die meisten Joysticks nciht den ganzen bereichen des
Potis. Die meisten haben soger noch eine Stellschraube o.Ä. pro Poti um
den verwendeten Bereich zu verschieben.
Und an dieser Stelle weiß ich jetzt wirklich nciht mehr weiter.
Wie kann man das miteinbeziehen?
Bei der Kalibration könnte man die Maximal-, die Minimal- und die
Mittelstellung abfragen.
Kann mir da jemand weiterhelfen?
Danke schonmal
Hi... Tja, analoge PC-Joysticks wurden zum Ansteuern von (Vierfach-) 555ern konstruiert, also als R für das RC-Glied. Daher diese doofe Schaltung. Was hältst du von einer Tabelle im Flash, mit der du die gemessenen Werte (am besten nur 8 Bit) umsetzt? ...HanneS...
Nicht so viel, da es sicherlich relativ aufwendig wäre, diese Tabelle zu erstellen. Zudem müsste man sie jedesmal, wenn man den Joystick wechselt neu ausmessen + anlegen. Das ist nicht gerade anwenderfreundlich ;-) 4-Fach 555 will ich mir eigendlich auch nicht umbedingt antun
Ähm, hat das Poti im Joy nicht 3 Pins oder sind nicht alle 3 Pins verlötet? Ich denke da an Plus an den einen, minus an den anderen und den Schleifer als Ausgang. Wenn das so verschaltet ist, dann ist das Poti doch schon ein variabler Spannungsteiler. Mit dem 100K-Widerstand beeinflußt Du dann die Ausgangsspannung so, das die Ausgangsspannung bei wenig Widerstand am Schleifer des Potis weniger beeinflußt wird und bei hohem Widerstand des Schleifers eben mehr. Dadurch vielleicht dann das nicht lineare? Gruß Andi
Nein, an dem Poti ist eben nur 5V und der Schleifer angeschlossen. Ich möchte das ganze eben gleich so konzipieren, dass man jeden beliebigen Joystick anschliessen kann, den kurz kalibrieren (mit einer taste) und los gehts. Btw.: Weiß jemand, oder hat jemand einen Link für das Protokoll von digitalen Potis (Sidewinder, etc)?
> leg halt 100K in die 5V ub!? - Geht das nicht??
ähm, hab ich jetzt nicht so ganz verstanden, was du meinst...:-)
Hey tubbu! du hast als fixe Größen: .) die Spannung über den fix Wid. (100k) - gemessen mim ADC .) den fix. Wid. (100k) .) die Spannung über beide Wid. - 5V Was du suchst is nur der var. Widerstand. Spg. über var. Wid. = 5V - Spg. über fix. Wid. Spg. über var. Wid / Spg. über fix Wid. = var. Wid / fix. Wid. --> var. Wid = (Spg. über var. Wid. * fix Wid.) / Spg. über fix Wid. ---------- Zum Kalibrieren kannst du dir dann die beiden Endpunkte ausmessen. Und der Wid. zwischen den beiden Punkten ändert sich ja direkt prop. zur Joystick Stellung - musst also nichts linearisieren! mfG aleX
Weil da sganez bissal überübersichtlich geworden ist (g) ein kleines Rechenbeispiel: Var Wid. = 50k -> Spg. über var. Wid = 1,666V 5V - 1,666V = 3,334V Rvar = (1,666V * 100kOhm) / 3,224V Rvar = 51,67kOhm der Fehler von 1,67kOhm liegt wohn an den Rundungsfehlern ;p mfG, aleX
Hmm ... hab bei dem Rechenbeispiel die Spannung über den var. Widerstand als gegeben angenommen ... das is natürlich flasch ... aber die nicht gemessene Spannugn musst du eben asurechnen - is eigentlcih ja egal wo du misst! mfG, aleX
Hi, ist schon etwas länger her, dass ich obigen Algorithmus
implementiert habe, aber irgendwie hat er nie richtig funktioniert.
Kürzlich ist mir auch eingefallen warum.
Der Grund ist/war, dass ein Joystick nie den gesammten Bereich des
Potis ausnutzt, sondern immer nur einen Teil. Dadurch hat die Gleichung
nie etwas wirklich lineares zurückgeliefert.
Der Schaltplan müsste also eigendlich so aussehen: R1 und R2 Bilden den
Poti im Joystick nach, R3 ist der 100K Widerstand, R1 ist der Bereich
des Potis, der nicht genutzt wird.
VCC
+
|
|
.-.
| |
| | R1
'-'
|
|
.-.
R2 | |<--|---|Out
| | |
'-' |
| |
|
|
|
|
| ---|
.-.
| |
R3 | |
'-'
|
|
===
GND
(created by AACircuit v1.28.6 beta 04/19/05 www.tech-chat.de)
Um den Wert von R2 zu erhalten muss man das System erst kalibrieren.
Dazu bewegt man den Joystick im gesammten Bereich und speichert den
größten und den kleinsten gemessenen Spannungswert. Der größte
Spannungswert entspriht einenm R2 von 0.
Man kann also folgende Formel anwenden:
R1 = R3* (5V - Umax) / Umax
Jetzt hat man R1 in Abhängigkeit von R3.
Dieser Wer wird jetzt in Folgende Formel eingesetzt, um den aktuellen
Wert von R2 zu erhalten:
R2 = (R3 - Ugemessen*(R1 + R3)) / Ugemessen
Wenn ich das ganze richig hergeleitet habe, dann erhalte ich nun einen
Wert, der proportional zur Joystickstellung ist.
Nun Setzt man in die Gleichung Umax und Umin ein und erhält somit einen
Wertebereich innnerhalb dessen sich der Joystick bewegt.
Diesen kann man dann auf den gewünschten Wertebereich (z.B. 8Bit)
transformieren.
-------------------
Soweit so gut, mein Vorschlag. Ich habe keine Ahung, ob das ganze
richtig ist, der Grund ist unter Anderem der, dass ich keine Ahung
habe, wie ich das ganze effizient implementieren soll (muss ich
wirklich float verwenden?)
Ich hoffe der obige Text ist einigermaßen verständlich
Vielleicht kann sich irgendjemand meinen Vorschlag mal anschauen und
verbessern, wäre sehr nett, danke.
Hallo, wo ist denn das Problem? Bei der Kalibrierung wird Max, Min und 0 abgefragt. Dann ist der aktuelle Wert pos = (adc - min) / (max - min) adc ist der vom AD-Converter ermittelte Wert. Pos ergibt einen Wert zwischen 0 und 1 als Bruchteil der Stellung (Mitte: 0,5, Max = 1, Min = 0). Wenn Du´s auf eine andere Bezugsgröße haben willst, einfach damit multiplizieren: pos = ((adc-min) / (max-min)) * 100 gibt 0 <= pos <= 100. 0 ist min, 100 ist max. Den Nullpunkt würde ich dann bei der Auswertung berücksichtigen und z.B. den Bereich zwischen 0,4 und 0,6 als "null" werten, wenn der gemessene Wert bei 0.5 liegt. Damit wird der Nullpunkt stabiler und Du vermeidest ein Zittern durch das Rauschen des Potis. Sebastian PS: Achte auf die Klammern beim Programmieren, Punkt vor Strich!!
Das Problem ist, und das habe ich schon weiter oben erwähnt, dass die gemessene Spannung am ADC NICHT linear proportional zum Wert des Potis ist. Die Spannung über R3 errechnet sich nämlich wie folgt: U = Uges * (R3 / (R1 + R2 + R3) Es muss also eine linearisierung vorgenommen werden. Die obigen Gleichungen sollen dies erreichen. Die Algorithmus, den du gepostet hast ist im Prinzip das, was ich mit >Nun Setzt man in die Gleichung Umax und Umin ein und erhält somit >einen Wertebereich innnerhalb dessen sich der Joystick bewegt. >Diesen kann man dann auf den gewünschten Wertebereich (z.B. 8Bit) >transformieren. umschrieben habe und ist ganz sicher der einfachste Teil der ganzen Berechung. PS.: Wo bitte habe ich keine Klammern gesetzt, oder Punkt vor Strich nicht beachtet?
Das erste Problem wird wohl sein, dass der ADC zuwenig Auflösung hat. Also dass der minimal und maximal erreichbare Wert (Spannungsteiler mit PC-Joystick und Widerstand oder Konstantstromquelle) zu dicht beieinander liegt. Sollte das nicht der Fall sein, also sollte dir die Anzahl der Stufen reichen, dann bietet sich eine Tabelle im Flash an (Anzahl der Einträge entspricht Anzahl der verfügbaren Stufen, als Inhalt den gewünschten Wert). Dies erfordert zwar etwas Flash, erspart aber die Rechenfunktionen. Wenn es nicht unbedingt ein (formschöner) PC-Joystick sein muss: Es gibt beim blauen C und bei www.mikroantriebe.de (oder so ähnlich, mal googeln) Mini-Kreuzknüppel, deren Potis als Spannungsteiler von Anfang bis Ende reichen. Damit erreicht man ganz einfach den gesamten Bereich des ADC, und das sogar halbwegs linear. Muss es unbedingt der PC-Joystick sein, dann würde sich eine Timerschaltung mit NE556 anbieten, wie sie auch im PC verwendet wird (dort aber mit 4-fach-555). Statt ADC wird dann die Impulsbreite der Timer gescannt. ... ...
Ich hab deine Formeln mal im Excel durchgespielt. Mit angenommenen 10k fuer R1 sieht es so, aus, dass du die groesste Spannungsdifferenz bei R3 = ~65k erreichst. Das sind dann ca 1.73V im Bereich von ~2.1V bis 3.8V (bei 5V Versorung des Joysticks)
Das Ziel war handelsübliche Joysticks anschliessen zu können, weshalb alternative Lösungen wegfallen. Auch soll jeder Joystick (nach einer Kalibration) funktionieren, weshalb die Lösung mit einer Tabelle nicht Möglich ist (oder hab ich das falsch verstanden) So eine Timerschaltung währe tatsächlich eine Möglichkeit, an die aich auch schon gedacht, aber wieder verworfen habe, da sich dadurch zusätzliche Bauelemente ergeben. Solange man etwas in Software lösen kann, würde ich das auch gerne machen. achja, ich brauche die Joystick Position in relativ geringer Auflösung, geht man davon aus, dass R3 und (R1 + R2) in etwa gleich sind (und das sind sie in etwa, dann liegt der Bereich der Messwerte ETWA zwischen 512 und 1023, reel wahrscheinlich etwas unter 9 Bit, das sollte ausreichend sein. Ich finde es nur etwas unpraktisch, dass ich die Gleichungen als float implementieren muss, damit ich eine ausreichende Genauigkeit erhalte ( hab da schon etwas rumprobiert und habe es nciht geschafft mit 16Bit integer auszukommen) Aber vieleicht kennt da jemand einen Weg das in 16Bit zu bekommen.... thx
@Karl Heinz du hast natürlich Recht, ich hab grad geschrieben, während du gepostet hast....
Angehängte Dateien:
-

joystick.jpg
130 KB
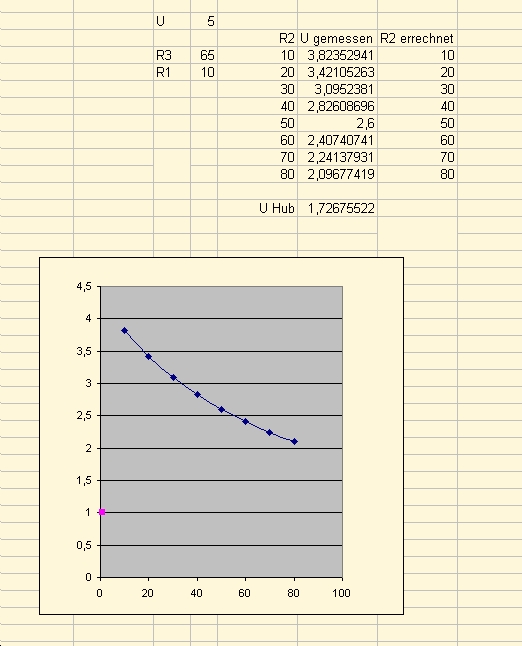
Uebrigens: Ganz sooo schlimm ist die Nichtlinearitaet gar nicht. Aber mach dir selbst ein Bild
Der benutzte Bereich - und damit die Werte von R1 und R3 haben absolut nichts mit der Linearität der Spannungsänderung zu tun. Wenn wir von Uges = 5V ausgehen, bestimmen R1 und R3 nur, ob sich die Spannung zwischen 0V und 5V oder zwischen 3V und 4V bewegt. Diese Offsets werden mit min und max in der Gleichung berücksichtigt. Ob die Änderung linear erfolgt, hängt einzig vom verwendeten Poti ab. In meiner Formel bin ich von einem linearen Poti ausgegangen. Solltest Du ein logarithmisches verwenden, sollte man für die Umrechnung des pos-Wertes tatsächlich eine Tabelle verwenden, um sich die Hantiererei mit log-Funktionen zu ersparen. Diese ist auch fix, da pos in jedem Fall zwischen 0 und 1 liegt. Allerdings verwenden Joysticks lineare Potis - logarithmische werden z.B. für Lautstärkeregelungen verwendet. Wenn allerdings Dein ADC nicht linear (genug) arbeitet, mußt Du sowieso erstmal dessen Kennlinie herausfinden, um sie entsprechend berücksichtigen zu können. Vielleicht hast Du aber auch ganz einfach ein Problem mit der Spannungsversorgung oder mißt andere Störungen, die Du als mangelnde Linearität wertest. Der Hinweis auf Punkt vor Strich bezog sich nur auf die Umsetzung im Programm, dabei geht mir zumindest sowas schnell mal daneben, und ich suche dann ewig nach dem Fehler. Sebastian
Sebastian, einer von uns beiden hat irgendwas nicht verstanden. Schau dir nochmal den Schaltplan genau an, der Poti ist nicht als einfacher Spannungsteiler geschaltet, da dies aufgrund der Kontruktion eines Joysticks nicht Möglich ist. Deshalb gilt für die gemessene Spannung die Gleichung (steht aber auch oben): U = Uges * (R3 / (R1 + R2 + R3)) Siehe "unbelasteter Spannungsteiler"
Wenn man den Joystick (statt Spannungsteiler) an eine Konstantstromquelle anschließt, dann dürfte die Kennlinie linear werden. Man kann den Strom so einstellen, dass in Mittelstellung etwa die Mitte des ADC-Bereichs erreicht wird (128 bei 8-Bit ADC). Für die Konstantstromquelle benötigt man aber eine höhere Betriebsspannung als 5V. Daher sollte der ADC-Eingang mit einer zusätzlichen Z-Diode und einem Vorwiderstand geschützt werden. ...
@karl heinz du hast recht, im exel sieht das wirklich nicht besonders unlinear aus, aber ich hab das am anfang auch mal ohne linearisierung ausprobiert und es hat sich schon merklich geäussert.
Arrggghhhh.... ich Depp habe natürlich übersehen, daß sich der Gesamtwiderstand eben auch ändert... Für R1 komme ich auch auf R3(Uges * Umax) / Umax. Allerdings ergibt sich bei mir für R2: R2 = R3 * Uges / Umess - R3 - R1 Ich habe die Werte in einer Tabelle durchgespielt und mal auf 2 Nachkommastellen begrenzt. Wenn man dann auf ganze Werte rundet, bekommt man immer die Ausgangswerte - das wäre in Deinem Fall kOhm-genau. Dann kannst Du mit long int rechnen und vor der Berechnung jeden einzelnen Wert mit 100 multiplizieren - das Ergebnis dann natürlich durch 100 teilen. Sebastian
@HanneS Die Idee mit der Konstantstromquelle finde ich gut, ich habe aber nur 5V zur Verfügung, aber das sollte doch zur Not ausreichen. Wieso benötigen Konstantstromquellen denn eine höhere Spannung? Der Widerstand in einem Joystick hat 100K, dass heisst man müsste die Stromquelle auf 0,05mA einstellen, damit man alle Werte zwischen 0 und 5V erhält, oder? @Sebastian Deine Gleichung ist eigendlich die gleiche, wie meine oben, nur umgeformt ;-) long hat ja 32 Bit und wie gesagt 16 Bit sind nicht genau genug. float hat auch 32 Bit. Gibt es einen Geschwindigkeitsunterschied zwischen der Berechnung mit long und der mit float?
>schnipp Der Widerstand in einem Joystick hat 100K, dass heisst man müsste die Stromquelle auf 0,05mA einstellen, damit man alle Werte zwischen 0 und 5V erhält, oder? schnapp< Du kannst den Widerstand nicht ja bis auf 0 Ohm reduzieren (Vorwiderstand am Poti, Vorwiderstand am Schleifer). Also geht die Spannung auch nicht bis 0V herunter. Vernünftig wäre ein Abgleich, der bei Mittelstellung des Joysticks 2,5V am ADC ergibt (bei 5,0V Vcc). Dann hast du nach oben und unten den gleichen "Hub". >schnipp Wieso benötigen Konstantstromquellen denn eine höhere Spannung? schnapp< Die Konstantstromquelle soll den Strom konstant halten, auch wenn sich der (Last-) Widerstand ändert. Dazu muss sich ja der Spannungsabfall der Konstantstronquelle ändern. Als "Stromsensor" nutzt eine (Transistor-) Konstantstromquelle den Emitterwiderstand bzw. den Spannungsabfall darüber. Als Referenz dient eine Z-Diode zwischen Basis und Bezugspotential (in diesem Falle +). Damit noch etwas Regelbereich bleibt, muss die Spannung um mindestens Z-Spannung + Basis-Emitter Spannung + etwas Reserve höher sein, als die höchste zu erwartende Spannung am Lastwiderstand. Mit 10 bis 12V würde das gut klappen. Die Stromquelle besteht aus - PNP-Transistor, - Z-Diode 3V9...5V1 (bei 12V) zwischen +12V und Basis, - Widerstand (hochohmig) zwischen Basis und GND, - Widerstand (niederohmiger) und Trimmpoti (in Reihe) zwischen +12V und Emitter. Der Joystick wird dann zwischen Kollektor und GND geschaltet, Kollektor geht dann über einen Schutzwiderstand an den ADC. Ein Kondensator von 10nF zwischen ADC und GND stabilisiert den Wert während der kurzzeitigen Belastung durch die Sample&Hold-Schaltung des ADC. ...
Was wäre denn jetzt, wenn man sich einen R/C-Timer am µC nachbildet, indem man über einen Portpin einen bekannten C nach Masse anschließt. Man schaltet den Portpin auf Low und entläd den C, dann schaltet man den Portpin auf Eingang und wartet und zählt dabei eine Variable hoch, bis der Pin High wird. Interrupt-Pins eignen sich dazu hervorragend (beim ATTiny2313 z.B der komplette PortB). Dann braucht man keinen A/D, lediglich einen Timer, eine schnucklige ISR und ein paar Kondensatoren (pro abgefragtes Poti 1x).
> Deine Gleichung ist eigendlich die gleiche, wie meine oben, nur > umgeformt ;-) Yep. Nur hast Du die Gesamtspannung unter den Tisch fallen lassen. Ist aber kein grosses Problem. > long hat ja 32 Bit und wie gesagt 16 Bit sind nicht genau genug. > float hat auch 32 Bit. > Gibt es einen Geschwindigkeitsunterschied zwischen der Berechnung > mit long und der mit float? Aber massig! float ist eine andere Welt.
Moin, also das R2 = (R3 - Ugemessen*(R1 + R3)) / Ugemessen ist mit Sicherheit nicht gleich diesem hier R2 = R3 * Uges / Umess - R3 - R1 Einfach daran zu sehen, daß bei Dir immer negative Werte rauskommen - Ugemessen*(R1+R3) wird immer größer als R3 sein. Interger-Berechnungen sind immer schneller als Float. Nicht zuletzt deshalb, weil float ja per Software gemacht wird - die AVRs haben schließlich keinen math. Coprozessor. Mit 2 Nachkommastellen bekommst Du den Widerstandswert kOhm-Genau. 100 Schritte pro Achse - das reicht nicht? Und der ADC wird wohl auch auf 10mV genau sein... Was willst Du mit einer 16Bit-Joystick-Position? Wenn der verwendete AVR einen Komparator mit int. Referenz hat, gibts noch eine Möglichkeit: Poti direkt an den Komparator-Eingang, einen 100nF-Folien*(!)-kondensator über 1K vom Eingang nach Masse. Zur Messung schaltest Du den Eingang als Ausgang und legst ihn auf low für ein paar ms (=Kondensator entladen). Dann beschaltest Du ihn als Eingang ohne Pullup und mißt die Zeit, bis der Kondensator auf 1.1V geladen ist (also das Komparator-Flag gesetzt ist). Diese Zeit steigt proportional zum Widerstand. Das ist so genau, daß es bei mir zum Auswerten des Ladezustandes eines LiIon-Akkus reicht(4.2-2.9V). Für 0-5V beim 100k-Poti sollte das locker reichen. Grüße, Sebi *Folie ist wichtig wegen der Temperaturkonstanz!
TrevelRec: da hab´ ich wohl zu lange zum Schreiben gebraucht ;-) Mit einem normalen Portpin wird das sehr ungenau, weil Du nie weißt, ob der jetzt bei 3.4V, 3.8V oder erst 4.2V "high" erkennt. Du mußt aber einen präzisen Referenzpunkt haben. Sebi
Ja, mag sein ;-), Komparator ist schon genauer - jetzt wo Du´s sagst. Da bekommt man ja auch ´nen schönen Interrupt. Wenn man mehr Pins braucht, kann man ja mit externen Komparatoren (OVs) an die Pins gehen. Ist jedenfalls einfacher, als sich mit der Programmierung die Finger zu brechen...
> also das > > R2 = (R3 - Ugemessen*(R1 + R3)) / Ugemessen > > ist mit Sicherheit nicht gleich diesem hier > > R2 = R3 * Uges / Umess - R3 - R1 Die exakte Formel 1) lautet R2 = (R3*Uges - Umess*(R1+R3)) / Umess wenn Du das ein bischen umformst, kommt Formel 2) raus
Das mit dem Portpin laden und entladen hab ich ganz am Anfang auch mal probiert. Es hat entweder viel zu lange gedauert, oder war viel zu ungenau, je nachdem, wie groß ich den Kondensator gewählt habe. Ich bin bei meiner Formel davon ausgegangen. dass U=1, statt 5 ist, deshalb sieht sie anders aus. @Sebastian Ich brauche keine 16Bit Joystick Position, tatsächlich brauche ich nur eine 7-Bit Joystickposition. Während der Berechung mit 16Bit treten aber massig Rundungsfehler auf, vorallem an Stellen in der Berechung, an denen Division durchgeführt wird. Zudem muss man bei einer Multiplikation darauf achten, dass die 16it nicht überschritten werden, man kann eben nicht einfach zwei 16Bit Zahlen miteinander multiplizieren. @HanneS: man kann ja eine Stromquelle auch aus einem FET und einem Widerstand bauen. Muss hier die Spannung auch (deutlich) höher liegen? Danke euch Tubbu
> man kann ja eine Stromquelle auch aus einem FET und einem Widerstand > bauen. Muss hier die Spannung auch (deutlich) höher liegen? Im Prinzip ja... Man könnte aber mal Folgendes probieren: - Als Referenz die interne Referenz (etwa 2,56V) verwenden. - Damit muss der Stron so gewählt werden, dass die Spannung am in Mittelstellung stehenden Joystick etwa 1,28V beträgt (50% ADC). - Statt der Z-Diode (am PNP-Transistor) eine LED mit 2V Spannungabfall einsetzen. Eine LED reicht für mehrere Transistoren, sie dient ja nur als konstante Referenzspannung. - Den (trimmbaren) Emitterwiderstand so dimensionieren, dass sich der gewünschte Strom einstellt. Es müssten etwa 1,5V daran abfallen. Das könnte geradeso noch mit 5V funktionieren... Da ich kein "Joysticktomteur" bin, habe ich mit den Dingern wenig Erfahrung. Ich besitze zwar welche, die wurden aber kaum benutzt. Ich weiß daher nichtmal, wie stark sich der Widerstand (von Endanschlag zu Endanschlag) ändert, ich weiß nur, dass die Fertigungstoleranzen enorm sind. Denn wir hatten anfang der 90er Jahre arge Probleme mit der Kalibrierung, als wir PC-Joysticks an die Analogeingänge des C64-Soundchips (SID) anschlossen. Der Soundchip war mittels Erweiterungskarte (Eigenentwicklung eines Freundes) in das System des Commodore Plus/4 eingebunden, wo er nun eigentlich garnicht hingehört. Eigentlich funktionierte das gut, nur bei jedem Joystickwechsel wurden andere Werte eingelesen. ;-( ...
Also in meinem USB-Joystick-Adapter habe ich das so gemacht: -Beschaltung genau so wie in Deinem ersten Beitrag + 100nF parallel zu den 100k -Einlesen der Spannung mit 10bit AD-Wandler ==> x = 0..1023 -Limiter bzw. Erkennung ob Joystick angeschlossen: wenn (x<256) dann kein_Joystick_angeschlossen, sonst x = max( 512, x ) - 512 (jetzt ist x = 0..511) - x addressiert eine Tabelle mit 512 Einträgen, die ich mit Matlab folgendermaßen erzeugt habe (sollte aber auch für nicht Matlab-Kenner verständlich sein). Ziel ist, die Poti-Stellung aus der Spannung zu ermitteln. ------------- Matlab-Code ------------------------ x = [0:511]; y = (1024./(x+512)-1)*254 - 127; y_int8 = floor( y + 0.5 ); y_int8 = min( 127, max( -127, y_int8 ) ); for (n=1:64) fprintf(1,'.db %5i, %5i, %5i, %5i, %5i, %5i, %5i, %5i\n', y_int8( (n-1)*8 + [1:8] )); end -------------------------------------------------- Der Zurückgewonnene Wert y_int8 liegt jetzt zwischen -127 und +127 und ist linear zur Potistellung. Bei mir wird jetzt der Rest (Mittelpunktsstellung, Aussteuerung)vom Betriebssystem gemacht. Wenn Du jetzt diesen Wert entsprechend mit Offset skalierst, sollte das auch mit 16bit-Integer-Arithmetik gut funktionieren. Gruß, Andreas
Tobi: Du bekommst genau an einer Stelle den Rundungsfehler - eben bei der Division. Wie ich oben geschrieben und per Tabelle nachgerechnet habe, wirkt der sich erst in der ersten Nachkommastelle des Poti-Wertes aus - also nicht, weil man das Poti sowieso nur "ungenauer" einstellen kann. Wegen der 16Bit-Multiplikation sollst Du ja mit long int rechnen - das ist 32 Bit lang und verkraftet das Ergebnis locker. Zur anderen Methode: um einen 100nF-Kondensator per 100k-Widerstand zu laden, benötigt man 0.05 Sek. Dazu kommen 1-2ms zum Entladen des Kondensators, Timer auslösen etc. Sagen wir also max. 100ms. Für welche Bewegung ist das denn nicht schnell genug? Gegen die Ungenauigkeit hilft vor allem der richtige Kondensator, s.o. b.t.d.t. Sebastian
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.