Hallo! Zur Zeit bin ich gerade dabei den SJA1000 über die LPT (Win2000)anzusprechen.Die LPT kann ich ohne Probleme ansteuern. Ich habe den SJA1000 zuvor mit einem ATMEL COntroller angesteuert. Funktioniert einwandfrei. Nur über die LPT funktioniert es nicht so wie ich es will. Wenn ich z.B. die Adresse 0 mit dem Wert 0x05 lade, dann bekomme ich den reingeschriebenen Wert nicht zurück. Es erscheint immer 0. In Borland Builder C++ habe ich versucht diesen C-Code zu benutzen. Das Timing habe ich genau so gemacht. Vielleicht liegt es an der Funktion Pause. Kann mir dabei jemand helfen?
Hallo Joe, sieh mal hier: http://private.addcom.de/horo/can200/ nach. Da gibt es Beispiele dazu Grüße Amdreas
Angehängte Dateien:
-

Schaltplan.jpg
190 KB
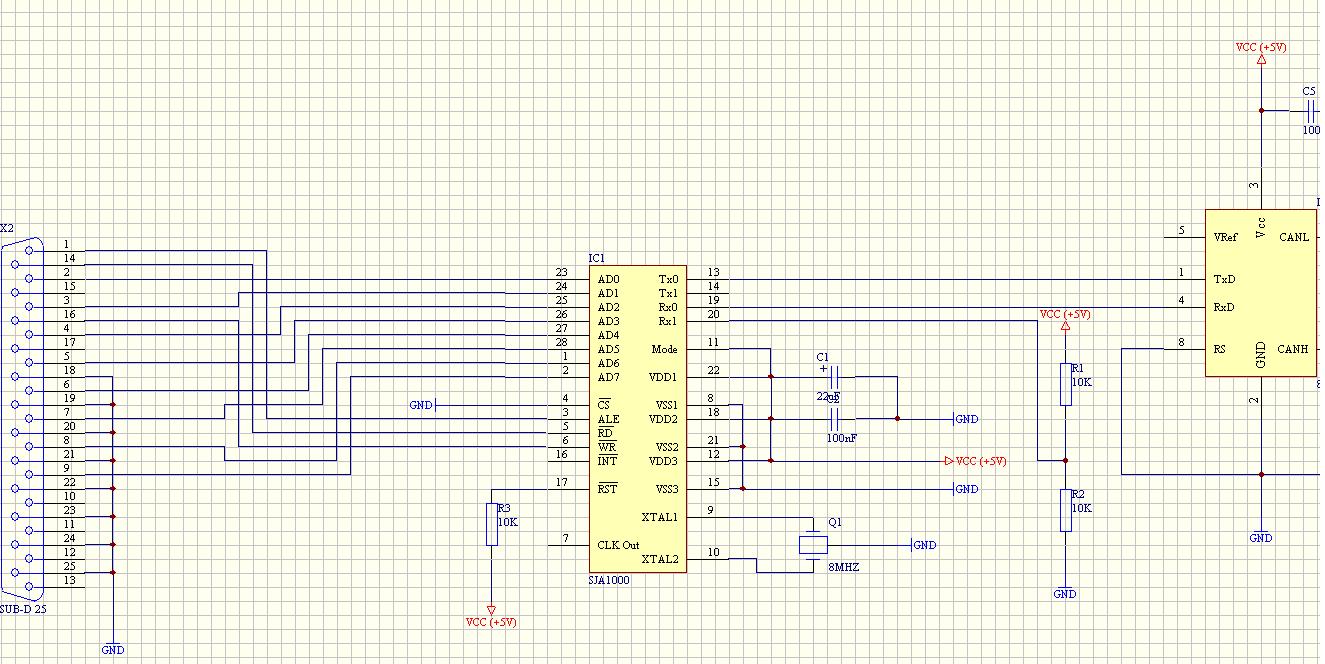
Hallo Andreas! Vielen Dank für den Link. Leider kenne ich diese Seite schon. Ich habe die Schaltung (siehe Anhang) so aufgebaut. Den LPT-Port kann ich ohne weiteres ansteuern. Nur wenn ich mit dem Borland Builder C++ die Daten vom SJA1000 auslesen will dann haut das nicht hin.
Angehängte Dateien:
-

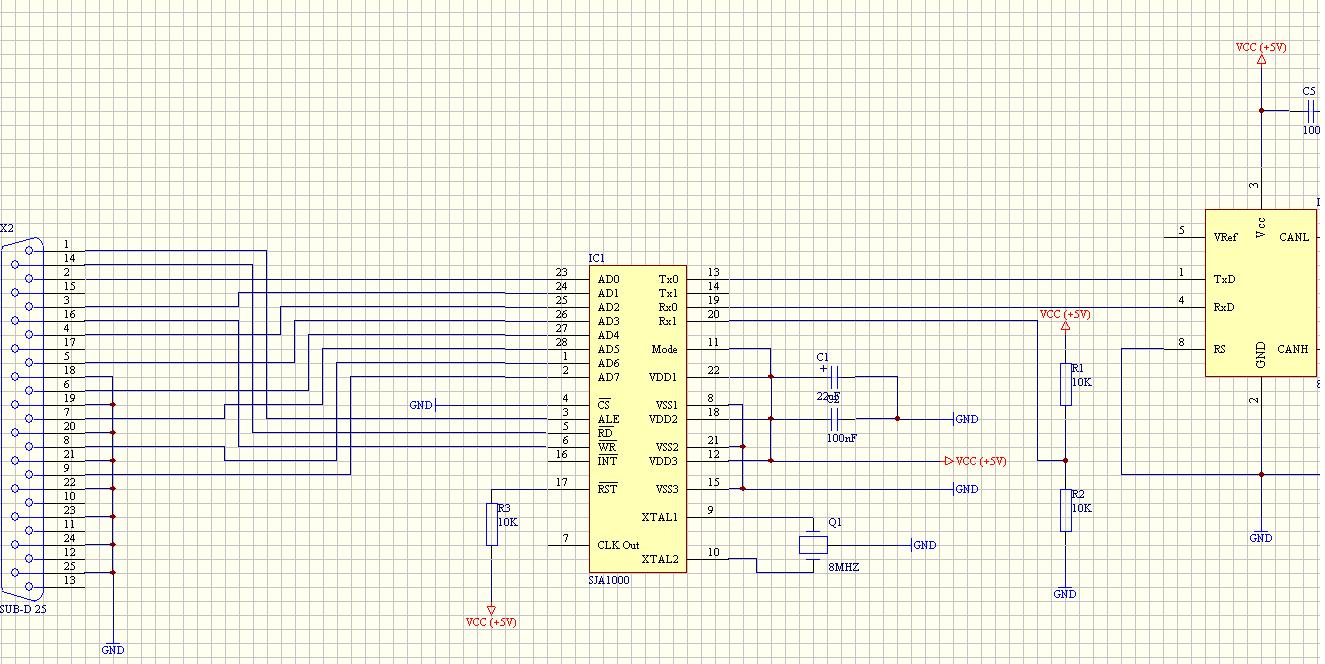
Schaltplan.jpg
190 KB
Hallo Andreas!
Vielen Dank für den Link. Leider kenne ich diese Seite schon.
Ich habe die Schaltung (siehe Anhang) so aufgebaut.
Den LPT-Port kann ich ohne weiteres ansteuern. Nur wenn ich mit dem
Borland Builder C++ die Daten vom SJA1000 auslesen will dann haut das
nicht hin.
void TForm1::pause(void)
{
for (unsigned int x=0; x<10000; x++)
{;}
}
void TForm1::canreg_write(unsigned char adresse, unsigned char daten)
{
write_DataRegister(0x00);
set_bit(0x37A,ALE);
clear_bit(0x37A, RD);
set_bit(0x37A,WR);
clear_bit(0x37A,ALE);
pause();
write_DataRegister(adresse);
pause();
set_bit(0x37A,ALE);
pause();
write_DataRegister(daten);
pause();
clear_bit(0x37A,WR);
set_bit(0x37A,WR);
clear_bit(0x37A,ALE);
}
unsigned char TForm1::canreg_read(unsigned char adresse)
{
short daten = 0;
clear_bit(0x37A,ALE);
pause();
write_DataRegister(adresse);
set_bit(0x37A,ALE);
pause();
set_bit(0x37A,RD);
pause();
daten = read_DataRegister();
clear_bit(0x37A,RD);
return daten;
}
/*----Initialisierungsroutine für den CAN-Controller
SJA1000------------*/
void TForm1::can_init(void)
{
do
{
canreg_write(0,0x01);
}
while (((canreg_read(0)) &0x01)==0);
canreg_write(4,0xFF);
canreg_write(5,0xFF);
canreg_write(6,0x43);
canreg_write(7,0x2F);
canreg_write(8,0x1A);
canreg_write(31,0x07);
do
{
canreg_write(0,0x00);
}
while (((canreg_read(0))&0x01)==01);
canreg_write(1,0x0C);
}
Meine Hardware habe ich auch schon überprüft. Ich kann einfach den Fehler nicht finden, warum es nicht geht. Wie gesagt mit meinem ATMEL Controller funktioniert die Kommunikation mit den CAN Controller.
Versuch doch statt pause einfach mal sleep(ZeitInMS). Vielleicht gibt Windows Deine Daten ja nicht raus. ISt nur ein Gedanke der mir gerade gekommen ist als ich gesehen habe wie Du die Pause realisierst. Grüße Andreas
Dabke Andreas! Werd ich mal versuchen! Gibt es sonst noch was dir aufgefallen ist?
Hallp Andreas! Dies hab ich jetzt auch mal ausprobiert. Leider klappt es immer noch nicht. Grrrr...
Mit Borland Builder C++ schaffe ich es noch als nicht, den CAN
Controller korrekt anzusteuern. Wenn ich z.B. vom Register 0x06 den
Inhalt auslesen will dann erhalte ich immer wieder 0x06. Bei den
anderen Registern ist es genau so. Ich weiss nun nicht mehr was ich da
jetzt noch tun kann, damit es funktioniert. Vielleicht stimmt auch was
mit der Verzögerung nicht. Hmmm...
void TForm1::pause(void)
{
Sleep(500);
}
void TForm1::canreg_write(unsigned char adresse, unsigned char daten)
{
write_DataRegister(0x00); //Daten 0
set_bit(0x37A,ALE); // ALE = 0
clear_bit(0x37A, RD); // RD = 1
set_bit(0x37A,WR); // WR = 1
clear_bit(0x37A,ALE); // ALE = 1
pause();
write_DataRegister(adresse);
pause();
set_bit(0x37A,ALE); //ALE = 0;
pause();
write_DataRegister(daten);
pause();
clear_bit(0x37A,WR); //WR = 0;
set_bit(0x37A,WR); // WR = 1;
clear_bit(0x37A,ALE); // ALE = 1
}
unsigned char TForm1::canreg_read(unsigned char adresse)
{
short daten = 0;
clear_bit(0x37A,ALE); // ALE = 1
pause();
write_DataRegister(adresse);
set_bit(0x37A,ALE); // ALE = 0
pause();
set_bit(0x37A,RD); // RD = 0
pause();
daten = read_DataRegister();
clear_bit(0x37A,RD); // RD = 1
return daten;
}
Kann mir in diesem Forum niemand helfen? Ich bin auf die Hilfe des Forums angewiesen.
Also mein Studium des Datenblatts hat damals folgenden Verlauf der Signale ergeben (CS ist immer low, RD und WR sind anfangs high) : ALE=1 <Adresse> auf AD0-7 legen ALE=0 WR=0 <Daten> auf AD0-7 ausgeben WR=1 So läufts jedenfalls seitdem... Gruß Eddi
Hallo Eddi!
Danke für die Unterstützung. Ich habe es genau so programiert, leider
funktioniert es immer noch nicht.
unsigned char TForm1::canreg_read(unsigned char adresse)
{
set_bit(0x37A,ALE);
clear_bit(0x37A, RD);
set_bit(0x37A,WR);
short daten = 0;
clear_bit(0x37A,ALE);
pause();
write_DataRegister(adresse);
pause();
set_bit(0x37A,ALE);
pause();
set_bit(0x37A,RD);
pause();
daten = read_DataRegister();
pause();
clear_bit(0x37A,RD);
return daten;
}
Vielleicht ist ein Fehler im Schaltplan vorhanden. Siehe Dateianhang am Anfang des Threads. Ich weiss nun nicht was ich da jetzt noch tun kann. Also mir kommt es so vor, als ob der CAN COntroller die Adresse nicht korrekt übernimmt.
Was mir dabei noch auffällt ist, dass es bei der LPT kein Data Direction gibt wie z.B. beim ATMEL ATMEGA8535.
Na klar: Falls dein LPT-Port überhaupt bidirektional ist musst Du ihn natürlich auf Eingang umschalten, wenn du Daten lesen willst.
Ich habe einen ganz normalen LPT Port am PC. Ich weiss gar nicht ob er bidirektional ist. Wie kann ich einen LPT Port auf Eingang umschalten?
Hallo Joe, das muss irgendwo im Setup sein. Meine es mal da gesehen zu haben. Beim Booten des Rechners gelangt man dorthin. Grüße Andreas
Hallo Andreas! Ich hab mal im BIOS nachgeschaut. Der LPT Port steht auf EPP Modus. Also somit müsste es gehen. Ich muss dann möglicherweise im Control Register das Bit5 auf "1" setzen. Stimmt das?
Vielleicht hilft das: LPT know-how + Steuerung: http://www.lvr.com/parport.htm LPT-Monitor (zut Beobachtung der Pin-Zustände): http://neil.fraser.name/software/lpt/
Ok im BIOS habe ich die Einstellung für den LPT vorgenommen.
Leider kann das Reset Request Bit nicht auf "1" setzen.
Das Reset Request Bit muss doch geprüft werden um dann das Bittiming
und die Nachrichtenfilter zu setzen. Erst dann können CAN-Botschaften
gesendet oder empfangen werden. Das Programm bleibt immer in der
do..while Schleife hängen. Was muss ich ändern damit die
Initialisierung durchläuft?
/*----Initialisierungsroutine für den CAN-Controller
SJA1000------------*/
void can_init(void)
{
do
{
canreg_write(0,0x01);
}
while (((canreg_read(0)) &0x01)==0);
canreg_write(4,0xFF);
canreg_write(5,0xFF);
canreg_write(6,0x43);
canreg_write(7,0x2F);
canreg_write(8,0x1A);
canreg_write(31,0x07);
do
{
canreg_write(0,0x00);
}
while (((canreg_read(0))&0x01)==01);
canreg_write(1,0x0C);
}
Ok so wie es aussieht funktioniert die CAN Initialisierung.
Jetzt bin ich gerade dabei eine Botschaft auf den CAN Bus zu senden.
Das habe ich bis jetzt nicht zum laufen gebracht.
Das Programm bleibt bei "warten bis Sendung ausgelöst" stehen.
Es kann auch sein das die Initialisierung doch nicht richtig ist. Wie
gesagt den SJA1000 habe ich zusammen mit einem ATMEL Controller
am laufen. Klappt wunderbar.
/*----CAN Botschaft
senden------------------------------------------------*/
void TForm1::canmessage_write(struct message *ptransmit)
{
unsigned int id_1,id_2,id_3;
unsigned int id_1_hilf,id_2_hilf,id_3_hilf;
unsigned int trdscr_wert;
unsigned int i;
id_3=(ptransmit->id)&0x0f;
id_2=((ptransmit->id)/16)&0x0f;
id_1=((ptransmit->id)/256)&0x0f;
id_1_hilf=id_1*32;
id_2_hilf=id_2*2;
id_3_hilf=id_3/8;
trdscr_wert=(id_1_hilf)|(id_2_hilf)|(id_3_hilf);
canreg_write(10,trdscr_wert);
id_3=(ptransmit->dlc)&0x0f;
id_2=(ptransmit->rtr)*16;
id_1=((ptransmit->id)&0x0f)*32;
trdscr_wert =(id_3)|(id_2)|(id_1);
canreg_write(11,trdscr_wert);
for (i=0;i<=7;i++)
{
canreg_write (12+i,ptransmit->byte[i]);
}
canreg_write (1,0x01); //Sendung auslösen
do
{
}
while (((canreg_read(2))&0x08)==0); //warten bis Sendung fertig
}
Gibt es hier in diesem Forum niemand der mir dabei helfen kann?
Ich vermute Dein Problem beim Ansprechen der parallelen PC-Schnittstelle. Schau Dir doch mal folgenden Link an: http://www.the-starbearer.de/Praxis/ElektronikamPC/LPT/LPT%20programmieren.htm Unter Win NT/2000 und XP ist es nicht mehr so einfach möglich auf die Schnittstellen zuzugreifen. Kenne mich mit dem Builder nicht so aus, habe immer in Delpi programmiert. Für diese Programmiersprache findest Du im Web diverse sys- Treiber oder dll's (Port.dll) die dir den Zugriff auf die Register ermöglichen. Da es sich um eine dll handelt, sollte das Einbinden in den C++Bilder einfach möglich sein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.