Hallo, irgendwie komme ich mit der Richtund nicht klar. Machmal habe ich den Eindruck , das ein Motor bremst beim drehen. Die Drehrichtung stimmt auch nicht. Der L293d funktioniert. Motor 4 Volt(3Volt Nennangabe) Atmega 5 Volt Kann mir einer mal die Belegung nennen für die unteren Fahrzustände. Ich verzweifele schon. Die steuerung Atmega 32 : Atmega > L293D(nummer gemäss Anhang) PD 4 > Pin 1 PD 5 > Pin 9 PC 2/3 > Pin 7/2 PC 4/5 > Pin 10/15 Definierung der Steuerung : $regfile = "M32def.dat" $crystal = 16000000 $hwstack = 32 $swstack = 32 $framesize = 64 $baud = 19200 Declare Sub Robby_vor() Declare Sub Robby_zurueck() Declare Sub Robby_links() Declare Sub Robby_rechts() Declare Sub Robby_aus() Declare Sub L293_pin() Dim A As Byte Dim B As Byte Call L293_pin() Config Timer1 = Pwm , Pwm = 8 , Compare A Pwm = Clear Down , Compare B Pwm = Clear Down , Prescale = 256 Start Timer1 Wait 1 Call Robby_vor() Wait 2 Call Robby_aus() Call Robby_zurueck() Wait 1 Call Robby_aus() Call Robby_links() Wait 1 Call Robby_aus() Call Robby_rechts() Wait 1 Call Robby_aus() End Sub L293_pin() Ddrc.2 = 1 Ddrc.3 = 1 Ddrc.4 = 1 Ddrc.5 = 1 Ddrd.4 = 1 Ddrd.5 = 1 End Sub Sub Robby_vor() Portc.2 = 1 Portc.3 = 0 Portc.4 = 0 Portc.5 = 1 Portd.4 = 1 Portd.5 = 1 Pwm1a = 200 Pwm1b = 200 End Sub Sub Robby_zurueck() Portc.2 = 0 Portc.3 = 1 Portc.4 = 1 Portc.5 = 0 Portd.4 = 1 Portd.5 = 1 Pwm1a = 200 Pwm1b = 200 End Sub Sub Robby_aus() Portc.2 = 0 Portc.3 = 0 Portc.4 = 0 Portc.5 = 0 Portd.4 = 0 Portd.5 = 0 Pwm1a = 200 Pwm1b = 200 End Sub Sub Robby_rechts() Portc.2 = 0 Portc.3 = 0 Portc.4 = 0 Portc.5 = 1 Portd.4 = 1 Portd.5 = 1 Pwm1a = 200 Pwm1b = 200 End Sub Sub Robby_links() Portc.2 = 0 Portc.3 = 1 Portc.4 = 0 Portc.5 = 0 Portd.4 = 1 Portd.5 = 1 Pwm1a = 200 Pwm1b = 200 End Sub
Angehängte Dateien:
-

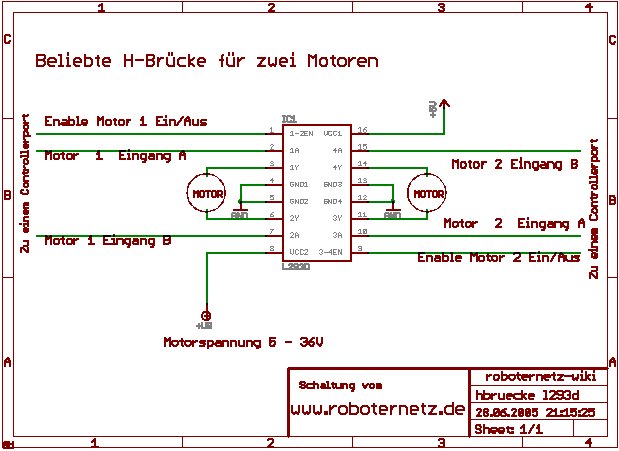
Bild1.jpg
55 KB
Hier hatte ich mich vertippt,da muss null rein: Pwm1a = 0 Pwm1b = 0 Sub Robby_aus() Portc.2 = 0 Portc.3 = 0 Portc.4 = 0 Portc.5 = 0 Portd.4 = 0 Portd.5 = 0 Pwm1a = 0 Pwm1b = 0 End Sub
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.