Hallo, ich interessiere mich dafür das Faller-Car System im Modellbau per Mikrocontroller bzw. PC zu steuern. Dies wird z.B. im Miniaturwunderland in Hamburg gemacht um LKWs und Feuerwehr Computergesteuert fahren zu lassen. Ich habe schon überall versucht Informationen darüber zu bekommen wie dieses System funktioniert aber leider nichts gefunden. Alles was ich weiß ist das die Fahrzeuge einem im Strassenboden eingelassenen Fahrdraht folgen indem sie mit einer art Schleifer (wohl magnetisch) darüber wegfahren und so den Verlauf der Strasse folgen können. In jedem Fahrzeug befindet sich ein Mikrocontroller der den Motor EIN bzw AUS schalten kann und LEDs an dem Fahrzeug steuert. Er soll wohl die Befehle von einem PC bekommen. Was ich nicht verstehe ist woher der Computer wohl weiß wo die Fahrzeuge gerade auf der Anlage sind , da sie ja speziell an gewisse Stellen "gefahren" werden können (z.B. Feuerwehr an ein brennendes Haus) und wie die Kommunikation zwischen Steuerung und Fahrzeug funktionieren kann ? Die können doch unmöglich in 500 verschiedene Fahrzeuge Funkmodule eingebaut haben die alle gleichzeitig im Frequenzband funktionieren können oder ? Ich würde mir so gerne eine Steuerung für zu Hause bauen. Doch ich komme einfach nicht dahinter wie das System funktioniert. Die Fahrzeuge scheinen sogar zu merken wenn die Spur belegt ist und bleiben hinter anderen Fahrzeugen stehen. Meine spezielle Frage ist jetzt ob vielleicht jemand das Geheimnis hinter dieser Fahrzeugsteuerung kennt und weiß wo man vielleicht noch wertvolle Informationen darüber bekommt. Natürlich wäre ich auch für jeden Vorschlag der mich meiner Steuerung näher bringt wirklich dankbar. Liebe Grüße Thomas
Hi Thomas, alles viel einfacher als du denkst. In den Autos ist in elektrischer Hinsicht nur: Ein Motor Ein Knopfzellenakkupaket Ein Ein-Aus-Schalter Eine Ladebuchse für den Akku Ein Reedkontakt Wenn man den Schalter einschaltet das fährt das Ding aufs gradewohl los. Durch einen Magneten an der beweglichen Vorderachse wird das Auto über dem Fahrdraht geführt. Das Steuern = Anhalten der Fahrzeuge geht mit elektrischen Magneten an den vorgesehen Haltestellen in der Fahrbahn. Hier ein Auszug aus der Beschreibung: "Mit den Fahrzeugen des FALLER-Car-Systems, die mit zusätzlichen Reedkontakten (SRK-Kontakte) ausgestattet sind, ist es möglich, das Verkehrsgeschehen vom Stellpult aus zu beeinflussen. Dies gelingt mit der FALLER-Stoppstelle 1675. Sie besteht aus einer elektromagnetischen Spule, die unter der Fahrbahn befestigt wird. In aktiviertem Zustand beeinflusst sie den Reedkontakt im Fahrzeug, sobald dieser in den Wirkungsbereich des Magnetfeldes gerät. Dabei wird der Fahrbetriebsstrom unterbrochen, das Fahrzeug hält an und setzt seine Fahrt erst dann fort, wenn die elektromagnetische Spule wieder abgeschaltet wird." Richtungswechsel etc. gehen über Weichen analog zur Eisenbahn, nur halt unsichtbar in der Fahrbahn durch umschalten des Fahrdrahtes. Du findest das alles in diesem Link erklärt: http://www.khm-modellbahnen.de/010_013_00.html P.S.: Wenn du die Autos mit einem PC/MC steuern willst, dann brauchst du nur die Magneten ein- und auszuschalten. Der Rest ist eine reine Zeitsteuerung. ciao Remp
Naja, so einfach ist das im MiWuLa auch wieder nicht... Dass bei denen in der Anlage jede Menge "Stopp-Stellen" verbaut sind, ist klar. Nur die angesprochenen Feuerwehrfahrzeuge fahren mit Blaulicht zur Unfallstelle und ohne wieder weg... Irgendeine Kommunikation muss da vorhanden sein, zumindest in Richtung des Fahrzeuges. Die Weg-Steuerung der Fahrzeuge wird von einem Rechner übernommen. Dem zu Beginn der Veranstaltung (z.B. Hamburger Modellbautage) der Fahrzeugname und die momentane "Stopp-Stelle" mitgeteilt wird. Vermutlich gibt es gewisse Messpunkte zwischen denen die Zeit gemessen wird, die ein Fahrzeug für diese Strecke braucht. Ist es zu langsam, wird es zur Ladestation "gelenkt". Prinzipiell wäre es auch möglich, über den Reed-Kontakt ein Protokoll zum Fahrzeug zu übertragen... Oder guckst du hier: http://www.miniatur-wunderland.de/cms/ So schlecht war ich gar nicht mit meiner Vermutung... Gruß Rahul
Hallo Thomas, die prinzipielle Funktion hast du bereits gelesen. Der Trick von Garry ist dass er den Haltestrom an den Stopstellen pulst und so ein paar Bit übertragen kann. Er kann also bestimmen welche Lampen auf der Strecke von einer Stopstelle zur nächsten leuchten werden. Der "Rest" des MiWuLa-Wunders sind tatsächlich hunderte Stopstellen und noch mehr Reedkontakte, die die Durchfahrt eines Autos an den Computer melden. Somit weiß der Computer mehr oder weniger genau wo welches Auto ist. grüße leo
also wenn man mich fragt ist diese methode ziemlich trivial. ok sie funktioniert, arbeitet aber auf keinen fall fehlerfrei; ist sehr platzaufwendig; es können große ungenauigkeiten entstehen usw. - dennoch funktioniert sie. aber wenn mans anders sieht, fährt ein vw käfer ja auch noch wobei der audi um längen vorraus ist ..... g also ich würde mal folgendes vorschlagen: das ganze rechnergestützt aufbauen. ein programm schreiben das am rechner die einkommenden daten permanent auswertet. in diesem programm natürlich eine detailierte karte des "gebietes" speichern. evtl, wenige transponder in der fahrbahn einlassen zwecks messfehlerrückstellung und "momentanpunktorientierung". am fahrzeug selber entweder ultraschallsensor oder primitieve infrarot sensoren welche den abstand messen. die datenübertragung fahrzeug-rechner könnte man zb mit funk relativ gut lösen oder mit hilfe der transponder ..... so und jetzt folgendes: du gibst im programm am rechner zb ein zielort ein und das fahrzeug sucht sich wenn du willst den schnellsten oder kürzesten weg zum zielort. oder es fahrt überhaupt nen irren umweg - kommt ganz drauf an wie fehlerfrei dein programm dann läuft. beispiel 2: lass ein gebäude brennen: sagen wir mal das fahrzeug hast du als feuerwehr geproggt. der rechner "merkt" es brennt - sendet ein signal ans fahrzeug (kannste jetzt mit der sirene vergleichen) - das fahrzeug schaltet sein blaulicht ein und fährt deffinitiev am schnellsten weg dort hin und anschließend langsam und ohne blaulicht wieder "nach hause" sollte dich mehr dazu interessieren, geb ich dir den guten rat mal in robotik foren zu stöbern - da findet man laufend gute lösungen zur autonomen navigation - das ganze könnte man ja schließlich noch mit nem neuronalen netzwerk (KI) aufrüsten usw ....... (nicht wundern - heiße nicht umsonst TechnikFreak g )
Auf der MiWuLa-Seite (s.o.) ist das System etwas beschrieben... Genaue Angaben machen die wegen patentrechtlicher Sachen nicht. Prinzipiell müsste es doch auch möglich sein, eine Rückmeldung (Positionsbestimmung) über den Schleifmagnet und Reedkontakte zu bekommen. Alleine, dass die Fahrzeuge mehrere Fahrstufen und verschiede Lichteinstellungen haben, erfordert ja eine Datenübertragung. Ich bin der Meinung, dass die das über die Stopp-Stellen (Induktiv; "... rechtlich geschütztes System, momentan noch punktuell,...") machen. Laut deren Internet-Seite ist das momentane System schon ausgereizt, und sie suchen nach einer neuen Lösung (IR ist wohl eine Möglichkeit / Teillösung). Die Jungs werden schon ihre Gründe haben, warum sie ihr System nicht offen legen... Gruß Rahul
@ Rahul nein so leicht ist das leider nicht mit der positionsbestimmung. stell dir vor es wäre so leicht - warum würden dann ein haufen wissenschaftler für elektronik am MIT für "optimale" lösungen der bot navigation suchen ....... nebenbei bemerkt gibt es mit unseren derzeitigen kenntnissen keine perfekten naviagtionslösungen, sondern nur welche die gut genug sind ihren zweck zu erfüllen ..... wie gesagt meine obige beschriebene methode ist für diesen fall die einfachste - und vorallem genaueste ...... lass mich aber gerne vom gegenteil überzeugen wennst nen besseren vorschlag hast :-)
hier mal zwei ganz gute RobotikForen: http://www.roboternetz.de/ http://www.elektronik-projekt.de/include.php?path=start.php
Hallo alle zusammen, erst mal vielen Dank für Eure Antworten. @technikfreak Deine Idee ist eigentlich wirklich prima, doch ich glaube das der finazielle Aufwand dafür viel zu groß ist. Das System was Du beschrieben hast ist aber viel zu aufwändig für das was die Fahrzeuge leisten müssen.. Ich meine die Fahrzeuge fahren ja schon irgendwie auf vordefinierten Bahnen und müssen sich nicht frei im Raum bewegen wie das autonome Roboter tun sollten. Daher denke ich das es eine viel einfachere Möglichkeit geben muss. ------------------------------------------ Ich habe mir die letzten zwei Tage viele Gedanken um die Sache gemacht. Dabei ist es mir erst einmal wichtig überhaupt einen gescheiten Lösungansatz zu bekommen der vielleicht von vielen zu gebrauchen ist und dabei noch relativ leicht realisierbar bleibt. Das eine Datenübertragung zu den Fahrzeugen stattfinden muss ist glaube ich außer Frage. Ich denke das die Fahrzeuge in Hamburg nicht umsonst einen Mikrocontroller an Bord haben. Auf Funk würde ich gerne verzichten das dies bei vielen Fahrzeugen zu einem Chaos führen kann und die Funkmodule auch nicht gerade günstig sind. Infrarot wäre vielleicht eine Idee aber wie soll man gewährleisten das die Fahrzeuge fast auf jeder Stelle auf der Modellbahn "erreichbar" sind ? Der Sensor sollte dann auch nicht so auffällig sichtbar sein. Wäre irgendwie blöd wenn jeder LKW einen IR-Receiver auf dem Dach hat. Also bleibt vielleicht die Lösung den Sensor ins Führerhaus einzubauen und die Übertragung vielleicht an selbstgebauten "Mautbrücken" durchzuführen. (Würde auf Modell-Autobahnen nicht mal auffallen ;-) ) Eine Idee von mir die Daten zum µC zu bekommen wäre eine zweite Leitung in die Fahrbahn zu legen und dann die Daten Induktiv zu übertragen. Da die Fahrzeuge ja alle aus Kunststoff sind dürften die auch nicht besonders gut abschirmen. (Im Gegensatz von Transpondern o. ä. bei Metall Eisenbahnen) Allerdings habe ich keine so große Erfahrung was die Induktive Übertragung angeht und ich weiß nicht wie groß wohl die Leistung (Magnetfeld) im "Datenkabel" sein müsste um ca. 2-3cm Luftweg zu brücken. Vielleicht wäre es sogar möglich die Akkus "unterwegs" induktiv zu laden damit die Fahrzeuge länger laufen. Aber das wäre nicht so wichtig. Dieses Konzept erklärt zwar noch nicht wie die Positionsbestimmung der Fahrzeuge funktioniert aber ich versuche die Angelegenheit lieber Schritt für Schritt zu lösen. Wäre wirklich froh wenn die Datenübertragung wenigstens funktionieren würde. Was meint ihr denn zu der Induktiven Lösung. Glaubt ihr das sowas funktionieren würde ? Liebe Grüße Thomas
@ Thomas Schmidt Hm ..... hätte da noch ne möglichkeit die vieleicht etwas passender wäre: also angenommen du baust eine landschaft auf (so wies bei kleinbahnen zb ist). dann hast du natürlich auch straßen; auf diesen straßen zeichnest du linien (wie die mittellinien auf ner echten) nun kannst du ein fahrzeug bauen, ohne all dem technischen aufwand den ich beschrieben hab, sondern du baust auf der unter seite des fahrzeuges einfach ein system zur linienverfolgung (camera, infrarot, etc.) gut da du jetzt gesagt hast es gibt vordeffinierte wege, kannst du ihm jeden weg den dieses fahrzeug "kennen" soll nun fix einproggen. gibst du dem fahrzeug nun ein zielort ein (also zb fahre zum rathaus) verfolgt er diese linie auf dem vordeffiniertem weg. die linie dient in dem fall dann rein der positionsbestimmung mittels wegzeitmessung - grob erklärt ..... wie wärs mit der lösung?
@TechnikFreak: Im Maßstab 1:87? (ja, ich kenne einschlägige WWWW-Webseiten) ...
Wo ist denn das Problem mit der Positionsbestimmung? Die blöden Karren fahren mit Hilfe eines Magneten entlang eines Eisendrahtes. Wenn ich jetzt irgendwo eine Lichtschranke einbaue, und etwas später noch eine, die Strecke und die Zeit die ein Auto dafür braucht, messe, dann weiß ich ziemlich genau, wo sich das Ding befindet bzw. sogar, wie schnell es ist (Blockstellenbetrieb bei der Eisenbahn...). Die Autos fahren wie auf Schienen. Zumindest sehen die Strassen im MiWuLa so aus - wie drei Spurrillen: Abrieb von den Reifen und vom Magneten. Die Stoppstellen sind elektromagnete bzw. elektrisch unterstützte Permanentmagnete. Das normaldumme Fallerauto hat einfach einen Reed-Kontakt eingebaut, der bei anliegendem Magnetfeld die Stromzufuhr zum Motor unterbricht. Die Fahrzeuge im MiWuLa werden dafür wohl einen magnetsensitiven Sensor haben (Hall-Sensor, Feldplatte, Spule...). Wird nun die Standard-Stopp-Stelle nicht mit einem konstanten Feld betan, sondern dieses im Rahmen ihrer Induktivität gepulst, kann man damit auch Daten transportieren. Übrigens funktionieren viele "intelligente" Autoschlüssel nach einem ähnlichen Prinzip: Die Schlüssel sind induktiv gekoppelt, sprich im Zündschloss und im Schlüssel sind konzentrische Spulen (Schlüsselschaft vielleicht noch als Eisenkern...) nun wird von der Schlossspule aus ein Wechselfeld erzeut, welches Energie liefert, die sogar die Elektronik im Schlüssel speisen kann. Der Schlüssel identifiziert sich dann durch kurzschliessen seiner Spule, was zu einer Veränderung des Stromes in der Erregerspule führt. Diesen Strom kann man messen... Wenn man jetzt verschiedene Pulslängen nimmt, kann man auch 0 und 1 unterscheiden. Mich würde auch interessieren, wie das mit der Regelung des Freaks im Massstab 1:87 aussehen soll. Übrigens gibt es die Linie in Form einen Eisendrahtes in der Straße... Ich gehe davon aus, dass es dem Rechner relativ egal ist, welches Fahrzeug sich gerade an dieser Stelle befindet. Das MiWuLa-Protokoll überträgt diverse Standardparameter und hat noch ein paar freiverwendbare "Bits". [Kritik] "Positionsbestimmung á la MIT"... Da hat jemand entweder keine Ahnung, wie groß der Massstab 1:87 ist, und was man so alles in so ein Modell reinbekommt, oder sich den Eingangsthread nicht richtig durchgelesen. Ich habe beim letzten Besuch im MiWuLa kein Mikrosystemtechnik-Labor da gesehen. Wenn ich dran denke, frage ich beim nächsten Besuch mal, wie die die GPS-Empfänger so klein bekommen haben... [/Kritik] [mittelprächtiger Vorschlag] In Hannover auf der Industriemesse habe ich vor ein paar Jahren mal einen interessanten Stand gesehen: Da wurde eine Carrera-Bahn per Bildverarbeitung gesteuert, und der Rechner war meistens besser als der Mensch... Wäre auch eine Lösung ohne Tunnel auf der Platte. [/mittelprächtiger Vorschlag] @Thomas: Auf der Anlage in Hamburg sind diverse Stopp-Stellen eingebaut, schliesslich weiß man ja vorher, wo ein Feuer ausbricht, oder es zu einem anderen Unfall kommt. Die ganze Anlage ist ja von vornherein geplant. Im Prinzip ist die Autoanlage ja auch nichts anderes als eine Eisenbahnanlage. Die Autos fahren ja wie auf Schienen und folgen dem Eisendraht in der Fahrbahn. Der Rechner im Hintergrund (es ist nicht nur einer...), macht doch eigentlich nichts anderes als eine Soll-Ist-Wert-Analyse: Er schickt ein Fahrzeug auf den Weg durch die Landschaft entlang eines Drahtes und gibt den Weg in Form eines "Zuglaufplanes" vor. In diesem Plan sind sämtliche Weichenstellungen eingetragen, die das Fahrzeug auf dem Weg zu seinem Ziel passiert. Als Rückmeldung gibt es Stationen, die das Fahrzeug innerhalb einer gewissen Zeit erreicht haben muß. Sonst gibt es entweder den Weg in die Ladestation als nächstes (Kontrollstelle innerhalb einer bestimmten Zeit doch noch erreicht) oder eine Störungsmeldung mit Angabe des Fahrzeugs und der vermutlichen Unfallstelle (Strecke zwischen zwei Kontrollstellen). Irgendwann in den 80ern habe ich mal Buch über Elektronik in der Modelleisenbahn gelesen, in dem auch eine Weichenstraße durch Angabe eines Start- und eines Endpunktes (Tasten auf dem Gleisbildstellpult) "berechnet" und die Weichen entsprechend gestellt wurden. Damals passierte das noch mit einer Diodenmatrix... @Freak: Von perfekt war nie die Rede, von Robotern oder anderen komplett-autonomen Fahrzeugen war nie die Rede... Wer das was er liest, auch versteht, ist klar im Vorteil... Wir haben in unserem Institut schon verschiedene atonome Fahrzeuge entwickelt bzw. fertigen eine Aufgabe gegeben. Die sind zwar nicht so "intelligent" wie die Fussball-Spieler (nicht Bundesliga [eher intelligenter], sondern Robo-Liga), sondern sortieren bspw. Lego-Steine nach Farbe oder folgen Personen (z.B. als Infusionsträger oder Golf-Caddy). Übrigens bin ich der Meinung, dass so ziemlich alles möglich ist, nur ist bisher noch niemand daraufgekommen, wie. Gruß Rahul
@ Rahul ich weiß sehr wohl wie groß der Maßstab 1:87 ist ..... zweitens gps kannste vergessen das funktioniert in räumen nicht und im cm bereich erst recht nicht drittens bekommt man das ganze (camer,ir) sehr wohl in so´n kleinen wagen mann muss eben nur die richtigen bauteile kaufen viertens, nachdem das ganze ja sowieso vorgeplant ist und die kisten nichts unverhofftes macht, lös es eben wie ichs gesagt habe: einen fixen weg einprogrammieren mitsammt dem verhalten während der fahrt ...... die linie in form eines drahtes kannste entweder wie schon erwähnt mit nem magneten/spule lösen (schwer,ungenau) oder eben mit nem aufgezeichnetem strich alá mittellinie einer echten straße. diese linie kann dann zusätzlich zu ner primitieven wegzeitmessung zur ortung des fahrzeuges verwendet werden. eine wegzeitmessung allein ist viel zu ungenau weil IMMER messfehler auftreten werden daher die nötige linienverfolgung. wennste das ganze noch genauer haben willst evtl. paar transponder in der fahrbahn einlassen (nen transponder bekommst ab 50 Cent) also nochmal zusammenfassen: (für "genaue" ortung) bauteile in winziger größe (smd vorrausgesetzt) ne smd camera (zb alá handycam) oder ir sensor zur linienverfolgung im fahrzeug verbauen. und fertig !!!!! du gibst den zielort ein, der wagen verfolgt nun die linie bis dort hin ...... genaue ortung funktioniert nun mit hilfe dewr linienverfolgung, evtl. der transponder in der fahrbahn (die kann man zur messfehler korrektur anwenden) und schluss endlich ner primitieven wegzeitmessung (welche aufgrund der übersetzung der scheibe & differenzen der antriebe leicht zu messfehlern führt -> transponder, linie, .....) p.s.: diese stoppstellen lassen sich dann entweder mechanisch mit nem weiteren tranbsponder realisierenn, oder eben softwaremäßig .... wenn du eh schonmal ne personenverfolgung realisiert hast, wo liegt dann dein problem mit der linienverfolgung??? die ist ja nämlich ziemlich trivial im gegensatz zur personenverfolgung .....
TechnikFreak: Das mit der Linienverfolgungs kannst Du vergessen. Gründe: 1. Zu viel Softwareaufwand 2. Zu unsicher (primitiv mit Magnet wird es besser gehen) 3. Geht im Dunkeln nicht 4. Zu hoher Stromverbrauch (...das ist ein K.O.-Kriterium). Die einzige praktikable Lösung ist eine Datenübertragung an Stoppstellen. Man muß ja nicht viele Daten übertragen. Über den Fahrdraht könnte es auch gehen, sowas müsste man halt mal ausprobieren. Allerdings wäre an einer Stoppstelle auch eine bidirektionale Lösung denkbar. Oder unidirektional über den Fahrtdraht zum Fahrzeug und an einer Stoppstelle unidirektional zurück. Wie gesagt, eine hohe Datenrate braucht man da ja nicht. cf
Wozu eine Linie otpisch verfolgen, wenn da ein Draht in der Bahn ist?
RC-Fernsteuerung rein, Fahrregler, LiPo-Akku, fertig. Wo ist das Problem?!? www.mikromodellbau.de AxelR.
@AxelR: Klar! Dies Seite wurde oben auch schon genannt. Nur, auf so einer Anlage wie sie in Hamburg steht, fahren ein paar Autos mehr (eine der Attraktionen...). Funkferngesteuerte auch manchmal...
ok das stimmt das die linie im dunkeln untergeht ...... dann bleibt nurmehr die möglichkeit zb mehrere transponder in der fahrbahn zu versenken, welche als stoppstellen dienen und gleichzeitig als datenübertragungsPUNKTE und gegenbenerfalls als messwertrückstellung. weil ne normale wegzeitmessung ist schon möglich nur muss man damit rechnen das messfehler auftreten ......
RC geht wunderbar bei 3...5...8 Autos. Bei mehr wird es Wellensalat (Probleme mit der Kanaltrennung) geben. Und jedes Auto braucht einen eigenen Kutscher (wie im STVO-Bereich). Ich denke aber, hier ging es um halbwegs automatisierten Fahrbetrieb vieler Autos. Und da ist das "immer an dem Draht lang" und ein moduliertes Magnetfeld an Stopstellen schon eine brauchbare und bezahlbare Lösung. ...
Der Vorteil der primitiven Drahtlösung ist der, daß die Lenkung rein mechanisch über den Fahrspurfolgemagneten erfolgt - alle anderen Ansätze bedürften einer elektronisch gesteuerten Lenkung, und für die dürfte in einem 1:87-Modell von -beispielsweise- einem VW-Käfer einfach kein Platz drinsein. Eine Positionsbestimmung lässt sich durch Einbau von Reedkontakten in die Fahrbahn (unmittelbar neben/unter den Fahrdraht) realisieren, das Magnetfeld des Spurverfolgemagneten müsste/sollte stark genug sein, um die Kontakte zu betätigen. Damit ist zu einem gegebenen Zeitpunkt klar, daß da ein Fahrzeug ist. Aufwendiger, aber mit Fahrzeugidentifikationsmöglichkeit wäre die Verwendung von Reflexlichtschranken, die in die Fahrbahnoberfläche eingebaut sind und einen an der Fahrzeugunterseite aufgeklebten Barcode lesen. Alternativ ließen sich RFID-Etiketten in den Autos unterbringen und mit Nahfeld-RFID-Lesegeräten auslesen, das aber dürfte deutlich aufwendiger als ein simpler Barcode sein. Da der Fahrzeugboden ja nicht sichtbar ist, kann man -geeignete künstlerische Begabung vorausgesetzt- ja auch den gesamten Boden mit Barcode bemalen, so daß auch eine leicht Spurdrift das Lesen nicht stören dürfte. Mit beiden Methoden ist es zwar nur möglich, herauszufinden, daß an einem bestimmten Punkt ein Fahrzeug vorbeigekommen ist, aber das sollte in Anbetracht des eisenbahnartigen Charakters der Angelegenheit auch genügen - da die Fahrstrecken durch den Fahrdraht vorgegeben sind, ist eine präzisere Positionsbestimmung kaum erforderlich. Also: Die Autos bleiben so dumm wie möglich (braucht weniger Rechenleistung im Auto) und machen so wenig wie irgend möglich selber. Das Einschalten von Sonderfunktionen (Blinken, Blaulicht etc.) ließe sich durch an strategischen Orten plazierte Infrarotsender (und -Empfänger in den Autos) realisieren - es ist ja schließlich nicht erforderlich, daß Sonderfunktionen zu jedem beliebigen Zeitpunkt an jedem beliebigen Ort aktiviert werden können. Auch das dürfte den Aufwand stark vereinfachen und in realistischere Größenordnungen zurückholen.
Wieso alles nochmals neu erfinden, wenn es die Technik dazu schon zu kaufen gibt? Für die Datenübertragung in die Fahrzeuge gibt es Infracar (www.infracar.de). Ein PC-Interface steuert über mehrere Ir-Dioden alle Fahrzeuge an (Gechwindigkeit, Blinker etc.). Für die Rückmeldung gibt es entweder Reedkontake oder Induktion, beides zu bekommen bei Littfinski Datentechnik (www.littfinski.de). Das PC-Programm Windigipet (www.windigipet.de) kann sowohl das Ir-Interface als auch die Rückmeldungen verarbeiten. Mit dieser Technik dürften sich so etwa 50 Fahrzeuge individuell steuern lassen...
MuLa, deine Idee ist gut, aber könntest du vielleicht noch etwas mehr darüber berichten (z.B. wie man mit windigipet die Autos steuern kann)?
@ Mula: Danke!! Endlich spricht jemand diese Seiten an (www.infracar.de , www.windigipet.de) Man braucht das Rad nicht immer neu zu erfinden! Hier möchte ich ergänzend noch die Seite www.modellautobahnen.de anbringen. @ carbauer1 Funktioniert genau wie bei der Digitalen Modelleisenbahn! Der PC steuert per WinDigipet alle Weichen (Abzweigungen) und die Fahrzeuge. Dazu wird eine Verbindung zu den Fahrzeugen benötigt (z.B. via IR). Weiterhin wird hierzu eine Rückmeldung von der Straße benötigt (Lichtschranke, Reed-Kontakt, etc.) die dem Programm mitteilt, wo gerade ein Fahrzeug passiert. Welches Fahrzeug das ist berechnet die Software selbst anhand der eingestellten Fahrstraßen. Grundlage dafür ist, dass ich dem Programm vor dem Betriebsbeginn mitteile, wo welches Fahrzeug steht! Ist nur eine grobe Richtung! Wer es besser weiß möge mich bitte korrigieren! Um mal zum ursprünglichen Thema zurückzukommen: Der Betrieb auf einem Leitdraht (Faller Car System) scheint auch mir die beste Lösung zur Lenkung der Fahrzeuge zu sein. Alternativ ist auch die Möglichkeit auf Magnetstreifen zu fahren. (www.mader-magnet-truck.de) Das Hauptproblem ist und bleibt die Datenübertragung zum Fahrzeug. Infrarot scheint für tunnelfreie Kleinanlagen eine geeignete Variante zu sein. Außerdem ist die nötige Technik weitestgehend entwickelt und braucht "nur noch" eingebaut zu werden (www.infracar.de) Doch die Tücke: keine ständige Verbindung gewähleistet! (auf der HP vom MiWuLa gut beschrieben) Deshalb wird im MiWuLa auch eine Kombination aus Funk, Induktion, Infrarot und einem "rechtlich geschützten System", wobei IR wegen der hohen Fehlerquote demnächst ausgeschlossen werden soll! Habe weiter oben gelesen, dass eine ständige Datenübertragung nicht notwendig sei und punktuelle Verbindungen ausreichen. Geht hier aber ein Befehl verloren, kommt die Software durcheinander, was es wiederrum nötig machen würde regelmäßig die Position des Fahrzeuges zur Fehlerkorrektur zu übermitteln (z.B. per Transponder) Meiner Meinung nach ist es hier günstiger und effektiver sich um eine regelmäßige Verbindung (muß nicht zwingend ständig sein, aber alle 0,5 - 1 Sekunde, je nach Länge der einzelnen Streckenabschnitte, halte ich für notwendig) Ein Lösungsansatz über den ich seit einiger Zeit nachdenke: Digitale Datenübertragung per Funk. Problem hierbei: viele verschiedene Frequenzen führen zu Chaos. Wäre es nicht möglich die Daten für mehrere Fahrzeuge auf einer Frequenz zu übertragen, indem man sie verschlüsselt losschickt und im Fahrzeug per Decoder entschlüsselt? Jedes Fahrzeug eine eigene Adresse wie beim Lokdecoder? Beispielsweise würden Decoder für Loks der Baugröße Z (1:220 für alle nicht Modellbahner) auch in einen LKW in 1:87 passen. Also benötige ich noch einen Funkempfänger, der die Daten an den Dekoder weitergibt und einen Controller für Motorgeschwindigkeit, Licht, Blinker, etc. Königslösung wäre hier natürlich, alle drei Komponenten in einen Baustein einzubauen. Allerdings habe ich mir unter anderem über folgende Punkte noch nicht ausreichend Gedanken gemacht: Stromverbrauch, Größe der Komponenten, Gewicht der Komponenten, Wärmeentwicklung Bin also für Anmerkungen und Komentare (positiv wie negativ) dankbar!!!!! Platin
Am Ende AX25 Protokoll wie bei Packet-Radio? Könnte man nicht RFID's oder Bluetooth nehmen? Wäre jedenfalls zeitgemäß... (ich hör' schon auf) AxelR.
Echtes AX25 erfordert aber eine bidirektionale Verbindung. Es sei denn, man beschränkt sich auf UI-Frames (Baken) und SABM-Frames (Verbindungsanforderungen)... Mit UI-Frames und einem eigenen Protokoll (Aufbau des Datenstrings) könnte das gehen. Aber die Decodierung (PR-MODEM) so klein zu bauen, dass sie noch mit ins 1:87-Auto passt, das wird schwierig (oder ein Fall für Axel...). ;-) ...
Also, ich könnte dir sagen wie es genau im Miwula funktioniert und was geplant ist, ich programmiere ja grad an der Stoppstellensteuerung. Aber lt. Arbeitsvertrag muss ich dich dann töten, wenn ichs verrate :-)
Wir machen das viel einfacher: Wir warten, bis es patentiert ist. Dann wirds veröffentlicht (muß ja) und dann bauen wir es nach. g Könnte sogar sein, daß wir uns alle die Hand vor den Kopf schlagen, weils garnicht so kompliziert ist...
Man, man,man. Macht doch einfach zwei Klebemagneten unter das Fahrzeug. Der Abstand sollte bei jedem Fahrzeug verschieden sein. So kann ein im Boden eingelassener Sensor beim ersten mal überfahren das Fahrzeug einmessen und bestimmen. Jedes weitere überfahren an beliebiger stelle auf der Anlage kann jetzt dem Fahrzeug zugeordnet werden. In einem µC der die Daten für die Fahrstrecke hat, kann dann Programmiert werden (über UART oder Äähnliches) wie jedes Fahrzeug zu fahren hat. Dafür muss natürlich kurz vor der Abzweigung, Ampel oder Äähnliches ein Sensor eingelassen sein, der das Auto erkennt. Wichtig: Das Timing sollte stimmen. Also nicht den Sensor zu kurz vor der Aktion bauen, damit der µC noch schnell genug schalten kann, bevor das Fahrzeug weiter ist als es soll. Hier Hilft dann nur Testen mit den eigenen Fahrzeugen, da diese ja meist auch verschieden schnell sind. Also das schnellste ist ausschlaggebend. Gruss Hein
@ Hein Wird wohl nicht funktionieren, wenn jedes Fahrzeug 3 oder mehr verschieden Fahrstufen zur Geschwindigkeitsregelung hat! Klärt mich mal bitte übers AX25 Protokoll auf!! Bluetooth wäre ne prima Sache! Ist das größentechnisch machbar?
Klar geht das auch mit mehr als einer Geschwindigkeit pro Fahrzeug. Habs doch auch am laufen. Es war ja auch nur eine Kurzerklärung von mir. Der µC ist ja auch nicht im Fahrzeug verbaut, der sitzt extern irgendwo auf der Anlage und kann bei bedarf mit nem PC verbunden werden um die Fahrrouten zu ändern. Der Controller schaltet dann die entsprechenden Reedkontakte fürs Fahrzeug wie Weichen, Ampeln, etc.
Hallo das was ihr da alles schreibt ist ja schön und gut. Man kann zur rückmeldung auch Reflex-Lichtschranken nehmen. Die man unter dem Draht mittig einbaut. (Mit Reedkontakten gehts auch. Faller machts auch so) Aber jetzt eine Frage: Wie sieht denn das Programm des AT90S2313 von Infracar.de aus. Weiß das vieleicht einer?
Wegen der Datenübertragung dachte ich: ein Stromdurchflossener Leiter (draht) ist ja auch ein Magnet... nun papt man nen Hallsensor unter das Fahrzeg, und den draht dann eindach an/aus Schalten und man könnte daten Übertragen, das Fahrzeug müßte dan nurnoch gucken ob die Daten für das Fahrzeug sind oder nicht :)
@Christoph Naja, dann wirst Du wohl mehrere Ampere durch den Fahrdraht schicken müssen, damit ein Hallsensor überhaupt anspricht. Viel Spaß mit der Stromrechnung. Da sind punktuelle Spulen schon effektiver, aber auch die müßten, um einen Hallsensor auszulösen, auch einiges an Energie verbraten. Ich könnte mir eine (oder mehrere) gestreckte Spulen in der Fahrbahn vorstellen, die auf einer NF-Trägerfrequenz (sagen wir mal 20 kHz) aufmodulierte Bits übertragen (AM) und auf diese Bursts wartet ebenfalls eine Spule und ein OP, gefolgt von einem µC mit angeschlossenem Input Capture Pin. Wie wär´s damit?
>> Ich könnte mir eine (oder mehrere) gestreckte Spulen in der
Fahrbahn vorstellen, die auf einer NF-Trägerfrequenz (sagen wir mal 20
kHz) aufmodulierte Bits übertragen (AM) und auf diese Bursts wartet
ebenfalls eine Spule und ein OP, gefolgt von einem µC mit
angeschlossenem Input Capture Pin. Wie wär´s damit?
Ich glaube da wird es dann irgend wann einmal ein paar Platzprobleme
geben, ..... soooo viel Platz ist in H0 autos dann auch wieder nicht.
Dann könnte man auch einen dieser Mini-Funk-Empfänger nehmen und über eine Fernsteuerung noch irgendwelche Daten an das Auto schicken... TableTruckTrail lässt grüssen...
Platz ist doch wohl für einen AtTiny2313 immer. Das ist dann aber auch schon das größte Bauteil, der OP (Rail-To-Rail, Single supply)und die Spule sind eher kleiner. Wenn man das induzierte Signal hoch verstärkt und gleichrichtet, hat man schöne Einsen (lang) und Nullen (kurz), die man mittels Input-Capture auch noch super filtern (was nicht den angestrebten Zeiten entspricht, fliegt ´raus) und auswerten kann.
Tach auch, ich such auch schon länger nach einer EINFACHEN !!!! Lösung. Infracar gefällt mir als Ansatz gut. Nur Zwei Dinge stören: 1.) Ungleich schnelle Autos rasen irgendwann aufeinander (spätestens, wenn ein Müllauto mitfährt). Mein Ansatz ist eine Abstandsregelung wie bei http://www.juechser.de/car/carcon.htm im Ansatz beschrieben. Allerdings fehlte mir bisher die Zeit alles praktisch auszuprobieren. 2.) Ich möchte natürlich alles über einen Controller Atmel und Co. laufen lassen. Da ich kein genialer Programmierer bin, hätte ich gerne eine Programmiervorlage des infracar-Systems oder eines ähnlich umgesetzten Systems um meine Ideen einbauen zu können. Ideal fände ich eine klartexte Makrosprache z.B. Auto 5 Geschwindigkeit 3 z.B: A5V3. Ich halte auch eine Infrarorübertragung für geeignet. Mein Fernseher versteht mich ja auch in fast allen Lagen.
Hallo! Hab eine Frage: Wieviele Ampere zieht eine Stoppstellenspule in etwa. Hab vor, dass ich so ein Teil an einen Digitalbaustein anhängen möchte und nun wissen möchte wieviele ich an einen Ausgang anhängen kann, da der Digitalbaustein bis maximal 3A ausgelegt ist. Danke für eure Antworten, Andreas
Hallo! Danke für die rasche Antwort. Ich bin leider nicht so der große Elektrotechniker aber lt. Adam Riese müßte ich theoretisch maximal ~37 Spulen anhängen können. Ich hab vor, maximal 7 anzuhängen, also müßte das klappen. Vielen Dank für die Antwort. lg aus Österreich, Andreas
0,08A * x = 3,0A 3,0A / 0,08A = x x = 37,5 du kannst also 37 Stoppstellen und ne halbe ;-) dranhängen wenn du von 80mA ausgehst... Naja so großer ELektrotechniker brauchst du da auch nicht sein, ausser die Umrechnung von mA in A, der Rest ist Mathematik... gruß Patrick
Also, erstmal hallo. Um mal etwas los zu werden, im MiWuLa wurde extra von einem Programmierer herangeholt um ein Prog. für das "Car-System" zu schreiben und die Farzeugprozessoren zu programmieren. In den Straßen ist nich eine einzige Stoppstelle! Die Fahrzeuge senden dem PC dauernd Motorspannung (=Geschwindigkeit) -> d.h. der PC weiß genau wo sich das Fahrzeug befindet und ob es evtl. geladen werden muss. Jetzt fragt man (frau auch :-)) sich wie die Fahrzeuge hintereinander halten. Der PC bzw. das Prog. verfügt über viele Fakten über Fahrzeuge (Länge, Geschwindigkeit) und Strecken. Was ich auch noch loswerden wollte: Ich mache eine Ausbildung zum Elektroniker und mein Kummpel hat Programmierer gelernt, wir haben viel probiert und getüftelt, aber man wir diese Steuerung nie so hinbekommen. Es sind eben echt Profis! Ich denke das die Funktionsweiße der Technik im MiWuLa nie veröffentlicht wird, eher wird es irgendwann zum Patent angemeldet! Mfg Thomas Friedemann
Hallo Thomas, naja wir (mein Sohn und ich) wollen nicht die MiWula Steuerung, das ist sicher zu kompliziert. Aber eine einfache Abstandregelung müsste sich schon machen lassen (wenn man mehr Zeit hätte). Ich denke an eine IR-Reflexlichtschranke z.B. SFH9101/9201 (Nur Arbeitsbereich stimmt nicht) Conrad: 153808 - 62 o.Ä. Im Gegensatz zu Euerem Ansatz möchte ich die "Abstandsintelligenz" ins Fahrzeug bringen. Vielleicht könnt Ihr das ja mal diskutieren. Gruß Jürgen
Mit IR hast du allerdings bei so kleinen Abständen sehr kurze Signallaufzeiten. Bei 10cm Abstand beträgt die Laufzeit nicht mal 0,7 ns. Das mußt du erstmal genau genug messen.
Jürgen, hast du schon mal die DC-Car Decoder ( http://www.modelleisenbahn-claus.de/dc-car.htm ) angeschaut ? Die eignen sich vielleicht auch noch als Inspirationsquelle. manu
Angehängte Dateien:
-

schalt_hallsensor_fcs.jpg
9,6 KB
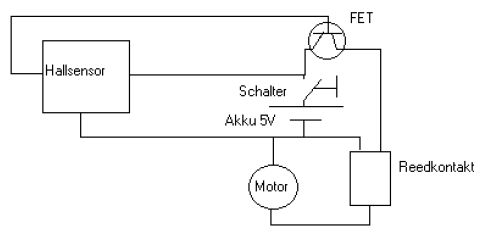
Hallo Jürgen, ich hab da mal eine Jugend Forscht Arbeit gefunden. Da arbeitete man mit Magnetsensorik. Vorn ins Fahrzeug einen Hallsensor und hinten einen oder zwei Magnete. Den Hallsensor über einen Feldefekttransistor (FET) schalten. Ist auf jeden Fall besser als Infrarot oder Lichtschranken (Denn hab ihr an den Gegenverkehr gedacht?). Ich hab da mal ein Bild mitgeschickt, das die Schaltung zeigt. Ihr könnt es ja evtl. mal ausprobieren. Gruß Thomas
Hallo zusammen, finde ich super, dass 1/2 Jahr nach meiner Vision so eine Diskussion aufkommt. Ich habs zum Anlaß genommen mal wieder ein wenig im Netz zu forschen und siehe da: eine Lösung. http://www.kreatives-chaos.com/index.php?seite=is471 Über die Problematik mit Gegenverkehr bin ich mir bewust. Muß man mal probieren. Gruß Jürgen
Das was in deinem Link beschrieben wird, nennt sich auch soweit ich das verstanden habe "Lichttaster". Das kann man sogar als Entfernungsmesser realisieren, indem man die Spannung des empfangenden Elements misst. Irgendwo hier im Forum gibt es da´zu auch einen Beitrag. Es arbeitet in etwa so: Man misst mit dem AD-Wandler die Spannung des Fotoelements (Photodiode, Phototransistor...). Dann schaltet man die Sendediode ein und misst wieder die Spannung am Fotoelement. Je nach zurückgesendeter Lichtmenge kann man auf die Entfernung zum Objekt vor dem Sensor schliessen. Mattschwarz ist natürlich wieder tötlich... Die Idee mit dem Hall-Sensor finde ich auch interessant. Ich frage mich aber, ob die vom Miwula wikrlich keine Stopp-Stellen eingebaut haben, denn die Fahrzeuge halten immer an genau den gleichen Stellen (ist zumindest mein Eindruck). Ich werde wohl beim nächsten Besuch mal eine Führung mitmachen...(und unter die Anlage kriechen, wenn gerade niemand guckt)
Rahul, Du bist wirklich köstlich! Am besten, Du nimmst Kamera, Laptop und Datenkabel mit, übernachtest unter der Anlage (aufpassen, dass am nächsten Tag geöffnet ist), zeichnest den Schaltplan, machst ein Backup des Steuerrechners und postest die Beute hier. Damit wir wissen, worüber wir diskutieren...
Kamera und Laptop sind nicht das Problem. An deren Serverschrank ist aber eine Tür - da wird es schwierig, mit einem Datenkabel ranzukommen. Vielleicht kommt bei dieser "Diskussion" ja auch ein alternatives System heraus, das man dann den Heinzeln in Berlin verhökern könnte...(haben die sowas schon, oder benutzen die einfach nur Faller?) Macht jemand bei der Entwicklung eines solchen Systems fur Spurweite N mit? (Das wäre wirklich eine Herausforderung...)
Hallo zusammen, in Berlin wird das System Infracar verwendet, allerdings auch mit einer PC-Steuerung, aber die ist leider noch Fehlerhaft, deswegen wird sie auch noch ni angeboten. Sie haben noch Fehler im Bereich 1:100 (Also 100 Signale und 1 Fehlerhaftes). Also N ist mir ein bisschen zu klein (ich arbeite gerade an TT, denn da gibts ja viele Fahrzeuge :-)) Mfg Thomas
kleiner als MLF und 0402/0201 geht nunmal nicht... Den AVR gibt es auch als DIE, aber nur bei entsprechenden Stückzahlen. Ich würde da allerdings gerne bei Infracar mitmachen! (Im Ernst). Wer mir also einen Kontakt machen kann, bittesehr. Gruß an alle AxelR.
>Wer mir also einen Kontakt machen kann, bittesehr.
Crimpen, löten oder schauben? ;)
ja nee, iss klar - würde Atze sagen. Lateralkleber ginge auch noch. oder traumpartner.tv?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.