Ahoi, ich versuche mich gerade an einer Regler Implementierung für einen kleinen Stellmotor. Ich habe erstmal die Sprungantwort der Strecke aufgenommen. -> S-förmige Kurve (also offenbar mindestens PT2 Verhalten), Tg=200ms, Tu=60ms. Das Verhältnis Tg/Tu=3,3 sagt laut diverser Tabellen eine schwierige Regelbarkeit der Strecke voraus. Ich will nun lernen wie man einen kompletten Regelkreis simuliert, um damit auch die (theroretisch) optimalen Regelparameter bestimmen zu können. (Will rumspielen und sehen was passiert) Problem ist jetzt: Wie bekomme ich aus meinen gemessenen Werten Tg, Tu die Parameter für ein PT2-Glied, damit ich die Strecke modellieren kann. Also von: Tg,Tu --> in diese lustige Form K/(1+T1*s)*(1+T2*s) Mir fehlen nun die Werte für T1 und T2 für die Simulation. Ich habe herausgefunden, dass dies unter dem Stichwort Approximation von Sprungantworten in der Fachwelt bekannt ist. (Bin leider nur Metzger) Die Wendetangentenverfahren nach Küpfmüller und Strejc fallen weg, da diese offenbar nur für ein PT1-Glied gelten. Andere Verfahren für PT2-Glieder, auf die ich gestoßen bin, gelten leider nur, wenn Tg/tu >9.5. In kurz: Wie komme ich an T1,T2 für ein PT2-Glied, wenn Tg/Tu<9 ?
Schau mal unter Einstellregeln nach CHIEN, HRONES und RESWICK: z.B. hier -> http://de.wikipedia.org/wiki/Faustformelverfahren_%28Automatisierungstechnik%29
Hallo, welche Softwarepackete hast du zur Verfügung bzw. mit welcher Software (Matlab / Simulink!?) möchtest du simulieren? Für Matlab / Simulink hätte ich noch M-Files gespeichert, wo du die Vorgehensweise siehst, wie man soetwas machen kann. Falls du diese benötigst, einfach posten. Ansonsten kannst auch diese Quelle verwenden: Haager Regelungstechnik 2.Auflage Seite 71 (ich hoffe ich irre mich nicht, da ich jetzt das Buch nicht bei der Hand habe) Nach der Bestimmung der Parameter musst dir dann noch überlegen, welchen Regler du verwenden möchtest, und da gibt es sehr viele Möglichkeiten (PID-Regler, Zustandsregler, FKL-Verfahren, ....). MFG Christoph
Männer, vielen Dank für eure Antworten. Die diversen Faustformelverfahren, nach denen man aus der Sprungantwort den Regler dimensionieren kann, sind mir bereits bekannt, stellen aber nicht mein Problem dar. Ich möchte den Reglerkreis in Simulink oder auch Scilab simulieren. Dafür benötige ich die natürlich auch die Übertragungsfunktion der Sprungantwort. Aus der Sprungantwort (habe ich mit Scope aufgenommen) will ich das Übertragungsverhalten hinreichend genau approximieren. Genau dafür benötige ich ein entsprechendes Verfahren (mit der oben genannten Randbedingung Tg/Tu<9) Christoph, an den m-Files für die grundsätzliche Vorgehensweise habe ich starkes Interesse.
Eine Möglichkeit bei Tg/Tu = 3.3 ist der Ansatz ein Übertragungselement mit n gleichen Zeitkonstanten T1 anzunähern. Hier beziehe ich mich auf "Taschenbuch der Regelungstechnik" von Lutz/Wendt. Hier ist eine Tabelle aus diesem Werk - Kapitel 9 : Ermittlung mathematischer Modelle ... n 2 3 4 5 Tg/Tu 9.64 4.58 3.13 2.43 Tg/T1 2.71 3.69 4.46 5.11 (auf 2 Dezimalstellen abgetippt) Dein Tg/Tu = 200 /60 = 3.33 der nächste Wert in der Tabelle ist 3.13 -> n=4 -> Tg/T1 = 4.46 damit T1 = 44.80 [ms] somit G(s) = Kp / [ ( 1 + 44.80 s) ( 1 + 44.80 s) ( 1 + 44.80 s) ( 1 + 44.80 s) ] Es ist auch eine Formel zur Berechnung der Tabelle angegeben, aber die möchte ich lieber nicht abtippen. mit freundlichen Grüssen
Angehängte Dateien:
-

Clipboard02.jpg
24 KB
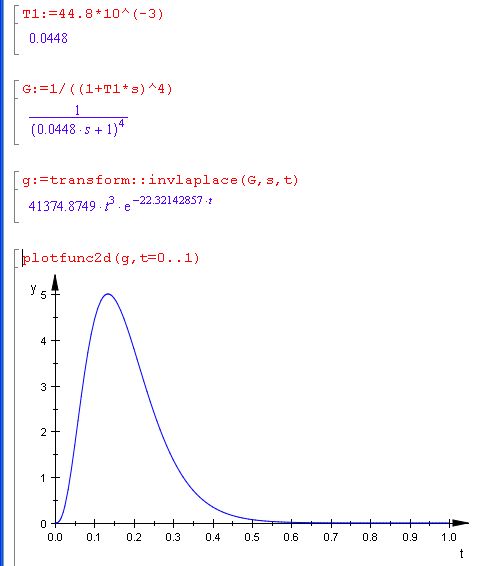
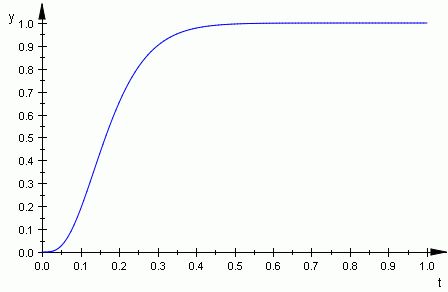
anstelle von T1 = 44.80 soll es natürlich heissen T1 = 44.80 * 10^(-3). Dann kommt man zu folgender Impulsantwort ( anhang) mfg
Hallo, im Anhang die Matlab / Simulink und Maple 9.5 Dateien. Jedoch weiß ich nicht wie "fit" du im Umgang mit Matlab / Simulink bist, ich hoffe die M-Files sind zum Verstehen. Wenn du Matlab verwendest, kannst du auch die Identification Toolbox verwenden. Da kannst du direkt eine Übertragungsfunktion identifizieren. http://www.mathworks.com/help/toolbox/ident/ Oder einfach mal ident in das Command Window schreiben und probieren. ;) Es gibt eigentlich sehr viele Wege welche zum Ziel führen. Ich habe auch selber mal mit der Optimization Toolbox einen PI(D) - Regler "eingestellt". Man erhält somit einen für die eigenen Vorgaben (beliebige Kostenfunktion) optimierten Regler. http://www.mathworks.com/products/optimization/ LG, Christoph
Wow, ich bin begeistert, das ist 1A Hilfe! @ R. M. Mir ist gar nicht in den Sinn gekommen, die Strecke durch ein System höherer Ordnung als PT-2 zu beschreiben. Durch ein wenig googlieren bin ich nun ebenfalls auf eine äquivalente Tabelle für PT-n-Glieder gestoßen. Sehr hilfreich, vielen Dank! Genau so einen Ansatz habe ich gesucht. @ Christoph. Vielen Dank für die Daten. Ich denke, ich kann mich dort durchbeißen. Die ML Identification Toolbox war mir bis jetzt noch nicht geläufig, macht einen sehr guten Eindruck.
Angehängte Dateien:
-

Unbenannt.JPG
100 KB
{kind=link}
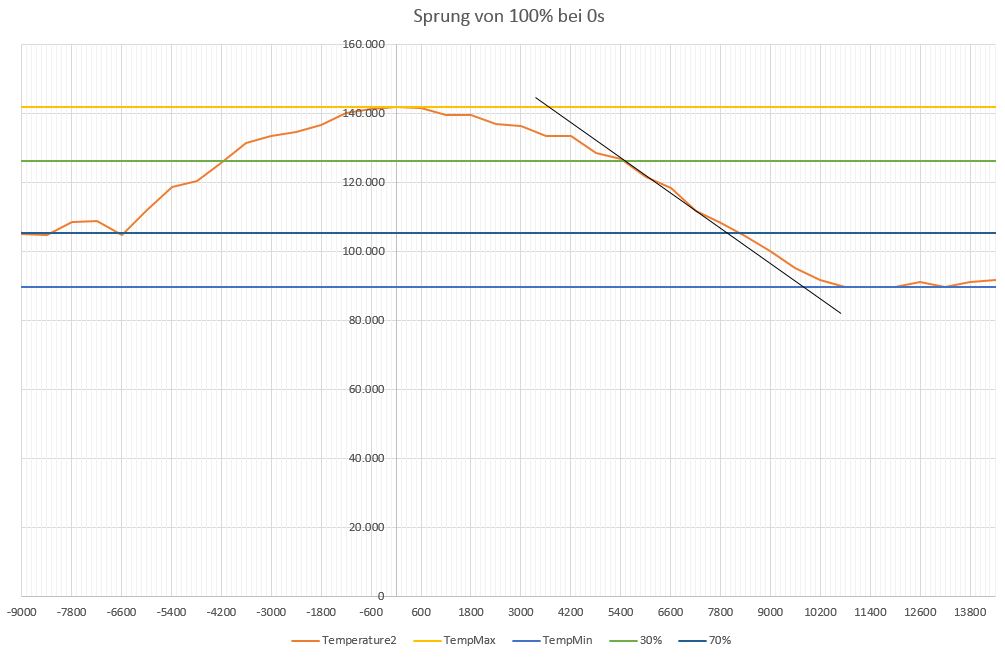
Hallo Leute, Ich habe ein ähnliches Problem. Ich arbeite mit der Software WinFact 7 und habe bereits auch versucht meine Strecke mithilfe von mehrenen Zeitgliedern gleicher Konstante nachzubilden. Ormann fällt auch weg, weil t30/t70 > 0,45. Im Anhang sehr Ihr meine Sprungantwort. Habe ich vielleicht unterscheidliche Zeitkonstanten in der Antwort? Wie kann ich diese ermitteln?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.