Hallo, ich möchte mir für meine 2 Schrittmotoren zum erstem Mal die Platinen nach der Direkt-Toner-Methode selber herstellen und habe mit Eagle die Platine dafür entworfen. Ich würde mich freuen wenn die Profis sich das mal anschauen würden und vielleicht noch den ein oder anderen Fehler finden. Habe schon viele Anordnungsmöglichkeit versucht komme aber immer wieder auf ~20 vias... Grossteil ist mit dem Autorouter gemacht. Wie wichtig ist das herausführen vom Enable des L297. Hab da was von hoher Stromaufnahme beim Stillstand gelesen??? Danke für eure Hilfe! Frederik
Angehängte Dateien:
-

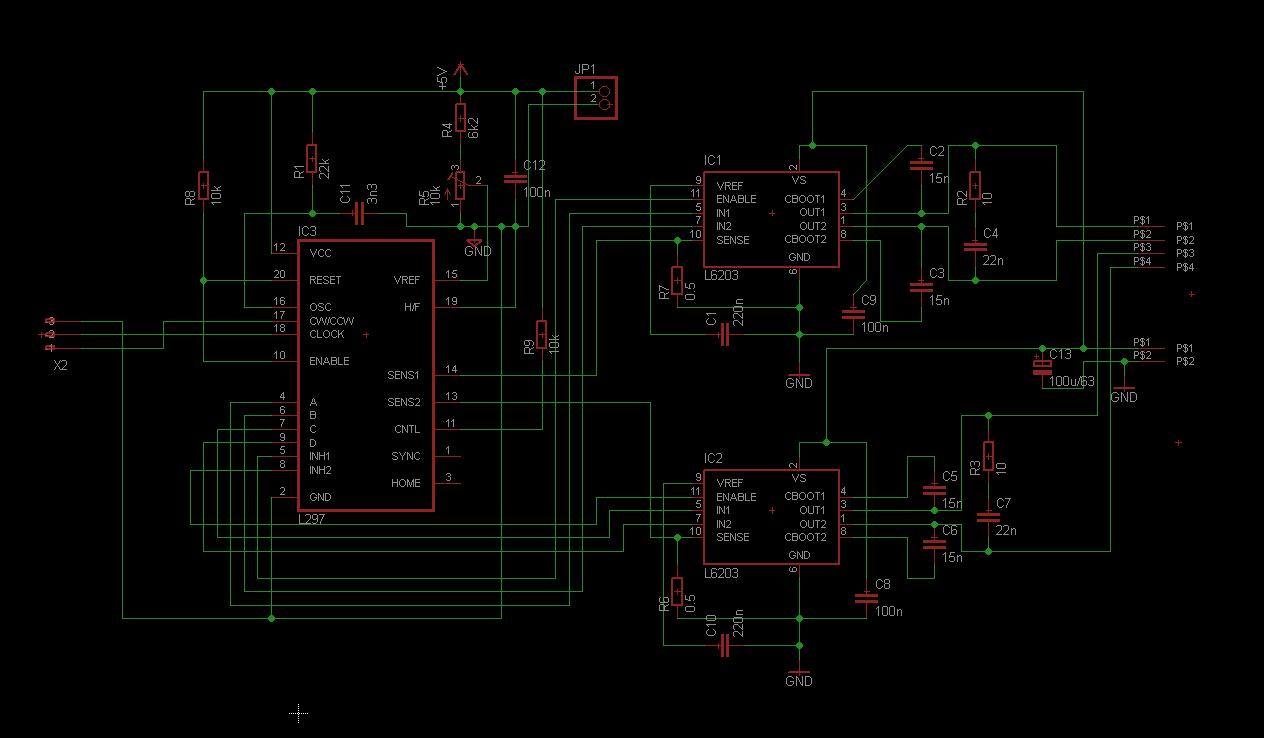
L297_L6203.jpg
80 KB
Mit beiliegender Schaltung und kleiner brd-Datei kann man 2 Schrittmotoren steuern. Die Bitfolge muss der uC angeben. Jo
Hallo John, danke für die Dateien! Mir kommt es auf den grösseren PeakCurrent und auf die geringe Anzahl von Pins an! Ausserdem habe ich die Bauteile schon gekauft... Grüße!
also ich hab enable auf 5V gehängt dann schaltet zwar der l297 nicht ab und du hast eben diese hohe stromaufnahme dafür haben deine motoren auch immer ihr haltemoment und was du auch immer damit bewegen willst kann sich nicht unkontrolliert verschieben. Achja und wenn du 2 Schrittmotoren damit ansteuern willst musst du das ganze ja auch 2 mal aufbauen ich rate dir dann den sync der beiden l297 zu verbinden zum einen sparst du dir einmal den schwingkreis und zum andern pfeifen die motoren dann wenigstens in der gleichen frequenz (müssen nicht unbedingt pfeifen aber wenn sies tun dann wenigstens synchron)
Angehängte Dateien:
-

L297_L6203_brd.jpg
180 KB
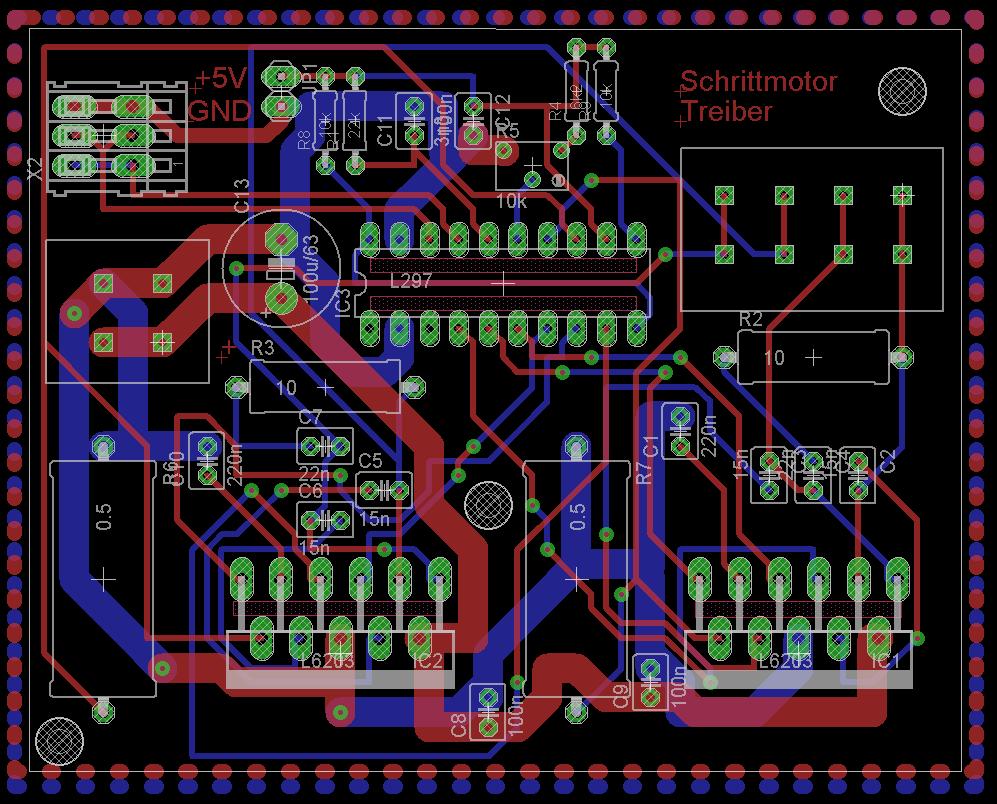
Guten Abend nochmal! In welchen Verhältnis steht denn ungefähr der Strom fürs Haltemoment zur Standardstromaufnahme bei Schrittmotoren? Werd den Jumper dann noch um einen Pin für die Syncs und vllt Enable erweitern. Kann ich die Syncs der Boards dann einfach über ein Stück Draht verbinden oder bekomme ich dann Probleme mit dem angesprochenen Schwingkreis (meinst du damit R1 und C11 in meinem Plan?) Hat vielleicht noch einer nen Tipp zum Boardlayout? Ist ja eigentlich nicht so kompliziert und dann gleich >20 vias -> Beim layouten von Hand krieg ich da auch keine bessere Logik rein... Frederik
Hallo Frederik, ich fang mal an zu meckern, aber bitte nicht persoenlich nehmen, das sind meine eigenen Erfahrungen, und es kommt darauf an was Du erwartest von Deinem Treiber. Ich werkel seit etwa 3 Jahren mit Schrittmotortreibern fuer die unterschiedlichsten Anwendungen herum. Meine ersten Platinen haben auch so ausgesehen wie Deine, das Ergebnis wird nicht das sein was Du evtl. erwartest. Die Motoren werden sich zwar bewegen, aber die anfaengliche Euphorie wird schnell von vielen Nebeneffekten ueberschattet werden. Um den Stromverbrauch zu senken ist der Enable nicht die erste Wahl. Der Enable des L297 ist ein MUSS wenn Du nicht vorhast alle paar Versuche neue H-Bruecken zu kaufen. Ich ueberwache den Strom am Eingang und am Shunt der H-Bruecken und Schalte den L297 ueber den Enable des L297 ab falls der Strom zu hoch wird. Die L6203 intern machen das nur am Shunt. siehe dazu http://www.datasheetcatalog.org/datasheet/SGSThomsonMicroelectronics/mXxyrv.pdf Um den Stromverbrauch zu senken und wenn Du nicht vor hast mit dem Treiber und Deinen Motoren zusaetzlich Deine Werkstatt zu heizen. Empfehle ich Dir am Vref des L297 eine "Stromabsenkung" einzubauen. Also ueber einen Transistor nur die ganze Vref geben wenn die Motoren drehen sollen. Wenn Sie nur "Halten" sollen reicht die halbe Vref. Das mit dem Sync der beiden Treiber zusammen, lass mal besser sein, es sei denn Du kaufst die Beiden Motoren neu und vom selben Hersteller. Wenn Du unterschiedliche Motoren hast haben die auch unterschiedliche Resonanz. Und dieser Sync hat absolut nichts mit den Schritten zu tun, er ist nur fuer den Chopper der Strombegrenzung. Die Mosfet Bruecken haben zwar intern an den Ausgaengen Dioden, die sind aber nur Spielzeug und Du wirst keine hohen Drehzahlen erreichen wenn Du Dich auf diese Dioden verlaesst. Ausserdem machen die Motoren einen heiden Krach. Zu Deinem Layout. Eagle und Autorouter, das sieht man! Route von Hand wenn die Optionen des Autorouters nicht ausreichen. Beim Routen daran denken das Strom "fliesst". Also im Kopf an "Wasserleitungen" denken und immer sehen woher der Strom kommt und wohin er fliesst. Keine "L's" und "T's" sondern "Y's". Lass es sein daran zu denken wieviele Vias Du auf dem Board hast. Denke vielmehr daran das die Leitungen die kuerzeste Verbindung zwischen den Punkten sind und nicht Kreuz und Quer ueber die Platine verteilt sind. Es ist kein Problem 5 Vias mehr zu loeten und kostet Dich 3 Minuten, aber es ist ein Problem die Stoerungen in den Griff zu bekommen und das kostet Dich Tage und eine neue Platine. R6, R7, C8, C9 sollten weiter "nach oben" sonst bekommst Du Probleme einen passenden Kuehlkoerper an die Brueken zu schrauben. C13 hat eine Via unter dem C, das ist keine gute Idee falls Du die Platine von Hand loeten willst. Mach die Vias groesser, laesst sich besser von Hand bohren und loeten. Der L297 braucht die "Fetten Leiterbahnen" nicht, er ist auf 5V und im mA Bereich. Korrigier die "Zacken" die der Autorouter and die Pad's der IC's gemacht hat, das kann man auch "gerade" machen. [OT] Und falls Du Dich noch nicht zu sehr an Eagle gewoehnt hast, empfehle ich Dir so bald wie moeglich auf KiCad umzusteigen. Kicad ist ebenfalls kostenlos, hat aber keinerlei Einschraenkungen. Ich war auch ein grosser Eagle Fan, bis mich die Einschraenkungen zu sehr genervt haben. Da war es aber schon zu spaet, und der Umstieg auf Kicad hat ein halbes Jahr gedauert. Wenn man bereits zu sehr "Eaglefiziert" ist macht es Probleme intuitiv ein Layout Programm zu bedienen. Aber es lohnt sich wirklich das Lager zu wechseln. Die Boards sind sehr viel schneller fertig und sehen viel professioneller aus. [OT] Gruss Ju
Full Ack! Die Platine wird so nicht gut funktionieren. Du machst zwar dicke Leitungen in der Versorgung, aber die richtig dicken Ströme fließen ja in den Motorleitungen, und die sind viel zu dünn und viel zu lang. Mache zuerst diese und dann die digital-Leitungen, bei denen ist die Länge nicht ganz so entscheidend. Am besten ist es, wenn der Strom eine möglichst kleine Fläche aufspannt: lege also die korrespondierenden Motorleitungen direkt übereinander. Die Shunt- und Snubber-Rs müssen low-inductive-Typen sein, Drahtwiderstände haben eine sehr hohe intrinsic Induktivität, da sie gewickelt sind. Suche nach professionellen Layouts, da kannst Du viel abschauen und lernen. Versuche mal, einen Teil (Rs und kleine Cs) in SMD zu bauen, das vereinfacht die Sache meist.
Schau mal diese Schaltung an. Stromabsenkung pfiffig gelöst. http://www.grummes.de/Nur-fuer-ihn-/Bausaetze-Module/Platine-fuer-Schrittmotorsteuerung-SMK3M4A::30.html Gruß, Hans
Ich will das Thema nochmal ausgraben. Ein gewisses Haltemoment ließe sich auch durch das Kurzschließen der Wicklungen erreichen. Das wird zwar nicht so hoch sein wie wenn die Spulen erregt sind, aber für einfache Anwendungen durchaus ausreichend. Man sollte natürlich dann darauf achten, dass man die Treiber nicht abbrennen lässt ;)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.