Hallo, jetzt habe ich mal eine Frage, aud die euch google nix gescheites ausspuckt. Mosfet H-Brücke treibt dauermagneterregten DC-Motor. D.h. die Quellenspannung des Motors liegt unterhalb der (Zwischen)-Kreisspannung, Versorgungsspannung. Wie kriege ich jetzt eine Nutzbremsung hin? Evtl. nach Aschaltung aller 4 Leistungsschalter, und die Aufschaltung des Motors auf einen Boost.Converter zur Einspeisung in die Akkus (Kondensatoren)? Ich hoff auf konstruktive Ideen. Hier stehen keine kommerziellen Interressen dahinter, sondern nur die techn. Frage. Hinweise auf Bücher alleine helfen da auch nicht weiter. Danke für das eingesetzte Hirnschmalz Thomas
Tschuldigung für die fehlenden Buchstaben zwischendurch. Ich glaube, die Asche auf/in der Tastatur stört doch! Thomas

Der technische Aufwand dürfte beträchtlich sein. Um wieviel kW geht es denn hier, damit sich das Ganze auch lohnt ? Peter
Ohne konkrete Anwendung. Man könnte z.B. an Solarmobile denken. Mir geht es nur drum zu verstehen. Bremschopper auf Widerstände ist halt auch nicht so elegant. Von den Kennlinien solcher Motore sehe ich aber auch keine andere Möglichkeit als Step-Up, um eine Spannung > UBatterie zu erzeugen. Wie machen die Solarmobilisten sowas? Vielleicht weiß ja noch jemand was. Danke Thomas
bei einer H-Brücke mit DC Motor hast du quasi den Hochsetzsteller schon mit eingebaut. Wenn du den Motor bremst, z.B. durch PWM auf beiden Low Side Fets, fließt während der off Zeit der PWM ein Freilaufstrom, der durch eine Spannung größer als Ubat angetrieben wird! Die Höhe der Spannung ist von der Induktivität des Motors und der PWM abhängig, d.h. schnell bremsen ->hohe Spannung u.u.. KH
Hi Karl Heinz, im Anhang habe ich mal 'ne Skizze. Der Bremsstrom bremst schon, aber ohne Nutzen. Der Freilaufstrom (in grün) geht zwar in die Batterie/Akku, aber das ist ja kein Gewinn. Mit Nutzbremsung meinte ich das, was heutzutage als "Rekuperation" bezeichnet wird, also das rollende Auto, oder die aus der Höhe absinkende Last. Meine Vorstellung davon ist, nach Abschaltung aller 4 Schalter, die drehzehlabhängige Spannung des Motors/Generators über uBat zu erheben, und dann per Stromregelung die Bremswirkung zu erzielen (bei gleichzeitiger Wiederaufladung ) der Akkus. Stromregelung, weil ich ja nicht immer eine Vollbremsung hinlegen will. Ich bin mal auf weitere Ansätze gespannt. Gruß Thomas
Da gibt es einen Haufen Zeugs zu von Prof. Marx von der TFH in Berlin. Der hat sich von den Dipl-Arbeiten seiner Sudenten ein Fahrrad gebastelt, dass beim Berg ab fahren die Akkus für das Berg auf fahren läd. Vieleicht hilfts Dir ja was ...
Angehängte Dateien:
-

nutzbremsung.JPG
30 KB
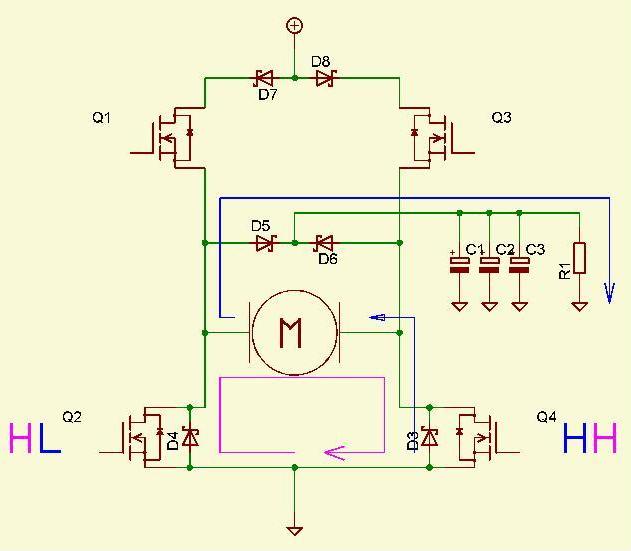
http://www.ralfwagner.de/mini.htm nachdem ich hier nachgelesen habe, seht fest, dass es sich dort zumnidest NICHT um einen dauermagneterregten DC-Motor handelt. Hier wird offensichtlich so verfahren. Der Motor wird kurzgeschlossen, um sich selbst zu erregen (schelm). dann wird der Kurzschluß behoben, un die Erzeugte Spannung dem Akku zurückgeführt. Ich gluabe nicht, dass es sich um einen Step-up Wander wandelt. Zumindest nicht in diesem, dort vorgestellten System. Die unter http://www.eatstoll.ch/ vorgetsellte Box ist ja nu nicht sehr groß( 10x15x4cm). Einen SetupWandler(habe schon einge große bauen müssen) für 2.5KW passt da zwar drauf, aber nicht mit 4cm Bauhöhe. Ich denke sehr wohl, dass der angesprochene Schaltschütz den Motor komplett trennt und durch die Verfahrensweise der Selbsterregung die erzeugte Spannung von Hause ohne Last hochläuft, was ja auch durch die Blume beschrieben steht.(bekomm ich nicht rauskopiert, sch..IE - unter Wirkungsweise) ich stell mal (m)einen Schaltungsvorschlag als pdf mit rein. Entspricht i.E. dem, was wir schon gesehen haben. Am Widerstand kann man ja mal testhalberweise die Spannung messen, die der Motor(in diesem Falle ein dauermagneterreger DC-Motor) erzeugt, wenn der linke NFet mit 50% Tastgrad angeblasen wird und der rechte dauerhaft durchgesteuert bleibt. Was würde denn passieren, wenn man einen nebenschlußmotor anschliesst und nur Q4 schliesst? nichmal das, D3 leitet ja sowieso in diesem Moment(je nach drehrichtung) kann man sich also auch das Schütz sparen? Wichtig an dieser Stelle, wennn nicht sowieso bekannt: Die BodyDioden in den Fets unbedingt mit "stabilen" Schottkys brücken. D7 und D8 können später weggelassen werden, wenn man den Lastwiderstand mit der Batterie verbindet. Die 3xC's natürlich auch. AxelR.
Hi alle, bei dem von AxelR angegebenen Projekt wird ein sog. Compound-Motor verwendet. Das ist eine Kombination von Reihen-und Nebenschluß. Wie AxelR schrieb kann der seine Erregung ändern, und damit zu einer bestehenden Drehzahl (bevor ich bremse dreht der Motor mit einer best. Drehzahl, und kurz danach auch noch) eine Quellenspannung erzeugen, die höher ist als die der versorgenden Spannungsquelle. Diese Möglichkeit ist naturgemäß beim dauermagneterregten Motor nicht gegeben. @AxelR Die Spannung an R wird auf jeden Fall kleiner als die Versorgungsspannung sein. ...ich überlege weiter! Gruß Thomas
Ich führe doch so schon seit Jahren Energie meinem Akku wieder zu... Ahhso, nicht beim bremsen, sondern beim langsamer werden, wenn der Motor sehr wohl noch mit Strom versorgt wird (Q3[OBEN RECHTS] angenommen leitet) und der Motor nun mit 50%PWM am Q2 an- und ausgeschaltet, damit er langsamer wird. Dann hauts die Spannung aber mächtig nach oben. Die wird dann überm Akku kurzgeschlossen (und die parasit. BodyDioden im PFET sterben dann gerne mal). Man bekommt den Akku nunich voll geladen, wie auch. die beim blauen C verkaufen schon seit '95 Fahrregler nach diesem Prinzip (Gaukler). AxelR.
Hi alle, das Projekt ist noch nicht gestorben. Treiber sind bestellt, und die Platine entsteht gerade. Dann kann ich auch mal Messungen daran vornehmen. Bin also dran. gruß Thomas
Hallo Thomas, beim bremsen könntest du einfach einen Boost Regler verwenden. D.h. du brauchst im einfachsten Fall in Reihe zum Motor eine Speicherdrossel und zwei schnelle Dioden über die oberen Mosfets einer H-Brücke. Dann wird beim Bremsen ein Motorpol durch den Mosfet dauerhaft gegen Masse gezogen. Der 2te Pol wird per PWM gegen Masse gezogen. Wenn nun der 2te Fet leitet wird die Energie in die Drossel geleitet und in der Sperrphase über die Diode (Anode an Drossel Kathode zu Akku+) in die Batterie geleitet. Mit dem PWM Verhältnis regelt sich der Strom durch Drossel und Motor. Den besten Wirkungsgrad erreicht man in der Regel bei 50% PWM. Ohne Drossel geht es bei manchen Motoren auch, aber der Wirkungsgrad wird deutlich schlechter. Bei dicken Motoren sollte man noch einen MKT parallel über den Motor klemmen. Alles klar? Robert
Hi Robert, so ähnlich habe ich mir das gedacht! Die Speicherdrossel müsste dann aber schaltbar sein, damit die Dynamik der Regelung darunter nicht leidet. Hast Du sowas schon gesehen? Der Tip ist aber gut. ...ich überlege... Gruß Thomas
Thomas, die Drossel stört die Regelung nicht. Ich habe es schon selber mehrfach für Lageregler so konzipiert. Die Zeitkonstante der Drossel liegt ja in der Regel mindestens 2 Dekaden von der des Regelkreises entfernt. Übrigens steigert dieser Aufbau auch im Teillast Bereich den Wirkungsgrad durch die Glättung des Ankerstroms. Grüße Robert
Hi nochmal, so langsam komme ich dahinter. Auch Karl Heinz verstehe ich jetzt. Da ich nicht weiß, ob die Ankerinduktivität reicht, habe ich mal eine Variante angehängt. Zunächst für eine Drehrichtung. Über T1 und T4 wird der Motor auf Drehzahl gebracht. Zum Bremsen wird T4 dauerhaft geschlossen, und der extra eingefügte Bremstransistor TB wird getaktet. Der Ladekreis, der die zusätzliche Drossel (und die Ankerinduktivität) lädt, ist unten eingezeichnet. Der Freilaufkreis, der die Akkus wieder lädt, ist groß eingezeichnet. Kann aber auch sein, dass die Ankerkreisindiktivität reicht, dann haben alle obigen Vorredner recht, und ich kann mir Arbeit sparen. Ich bin für alle produktiven Ideen dankbar. Gruß Thomas
wäre schon toll, wenn Du mal beide Varianten testen würdest. Ich habe i.M. keine Zeit für Tests usw. AxelR.
Da die Ankerinduktivität zum Choppen reicht, ist sie auch zum Bremsen gut. Du brauchst nur die 4 Fets und 4 Schottkys, die Du für eine Vollbrücke sowieso brauchst (Tb ist also T2, Db ist D1 (die parallel zu T1), und L der Motor selbst). Dann pulst Du kurz (mit der normalen Chopperfrequenz oder evtl. etwas langsamer) die zwei unteren (oder oberen) Fets, der Strom steigt stark an, Magnetfeld speichert Energie, dann öffnest Du einen (oder beide) Fets und die in der Spule (=Anker) gespeicherte Energie fließt über die 2 Dioden in den Akku zurück. Das ist die selbe Ansteuerung, wenn Du slow decay (langsames Absinken des Stroms) und fast decay beim L297 (Schrittmotor-Controller) abwechselst. Nur dass beim slow decay-Zeitpunkt nichts decayt, sondern durch das Kurzschließen der Strom wegen der Generatorwirkung ansteigt. Lies Dir das Datenblatt des L297 (www.st.com) und die AppNotes mal durch, sehr lehrreich! Die Nachfolgetypen haben dann noch aktive Gleichrichtung, d.h. sie schalten den Fet, der parallel zur gerade leitenden Diode liegt, auch noch an, um weniger Verlust zu haben. Man muss die Fets aber rechtzeitig abschalten (wenn der Strom auf Null gesunken ist), da sonst der Strom wieder in die andere Richtung zu fließen beginnt. Wenn Du die Drehrichtungsumkehr über ein Relais machst (oder gar nicht brauchst), kommst Du mit 2 Fets und 2 Schottkys aus (nur die links Seite einer Vollbrücke, rechter Motoranschluss auf Gnd o. Vcc). Auf kurze Leitungen achten!
Hallo Thomas, die Schaltung nach variante.mht wird wohl funktionieren, ist aber unnötig aufwendig. Machs einfach mal. Probiere es mit und ohne Drossel in einer einfachen H Brücke. Dann sieht man schon wie sich die Eigenschaften verändern. Die Wahl der PWM Frequenz ist auf jeden Fall entscheidend für den Erfolg. Grüße Robert
Danke für die rege Teilnahme. Ich habe mir mal die Bauteile besorgt, und werde (hoffentlich) diese Woche mal zum Aufbau kommen. Ich glaube es mittlerweile, dass es ohne Zusatzschaltung auskommt. Aus der Gesamtsituation heraus ergibt sich dann aber noch die Frage, wann, und warum man eine Widerstandsbremsung macht.
Hallo Thomas, hallo alle zusammen, da dieser Thread immermal wieder gern ziztiert wird, hole ich ihn mal hoch. Wie stehts mit den Tests? Bist Du zu gekommen? Ich mein, kann man von Ergebnissen partizipieren(oder wie das heisst?) Gruß Axel
Hallo Freunde, ich habe mich aus Langeweile bei meinem Praktikum mal mit der Rekuperation auseinandergesetzt und mit Matlab/Simulink ein elektrisch/mechanisches Simulationsmodell zur Rekuperation geschrieben. Fuer das Motormodell habe ich die Daten eines 250W/24V-Motors genommen. Der Steller ist idealisiert, das heisst der Motor wird entweder komplett kurzgeschlossen (Um = 0) oder direkt an die Batterie geklemmt (Um= 24V). Als Motoreingangsgroessen kann man auswaehlen zwischen konstanter Drehzahl, oder einer angetriebenen Masse. Dann habe ich mal eine Parameterstudie angeleiert um zu sehen, was im idealen Fall Einfluss auf die Bremsleistung und die Effizienz hat. Ich fasse mal die Ergebnisse zusammen, die ich aus den Bildern ableite: 1. Die Rekuperationseffizienz haengt linear mit der Bremsleistung ab. Bei einer Vollbremsung wird saemtliche Energie verheizt, weil der schnellste Weg zu bremsen eben ein Motorkurzschluss ist. Fuer eine Bremsung mit halber Kraft habe ich immerhin eine Effizienz von 0.5 2. Die Effizienz haengt unter den getroffenen Annahmen nicht von der PWM-Frequenz ab (in Wahrheit tut sie das natuerlich, Schaltverluste usw.), ist aber in jedem Fall kein kritischer Wert. 3. Je hoeher die Induktivitaet, desto besser. (Wobei wir "nur" mit dem Motor schon ganz gut am Optimum liegen.) 4. Je niedriger der Widerstand, desto besser (Jaja, ich weiss, ne Riesenerkenntnis!) Wenn ihr selbst die Simulation benutzen wollt, noch eine Warnung: Sie ist mit heisser Nadel gestickt. Wuerde mich freuen wenn der ein oder andere trotzdem mal reinschaut. Stefan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.