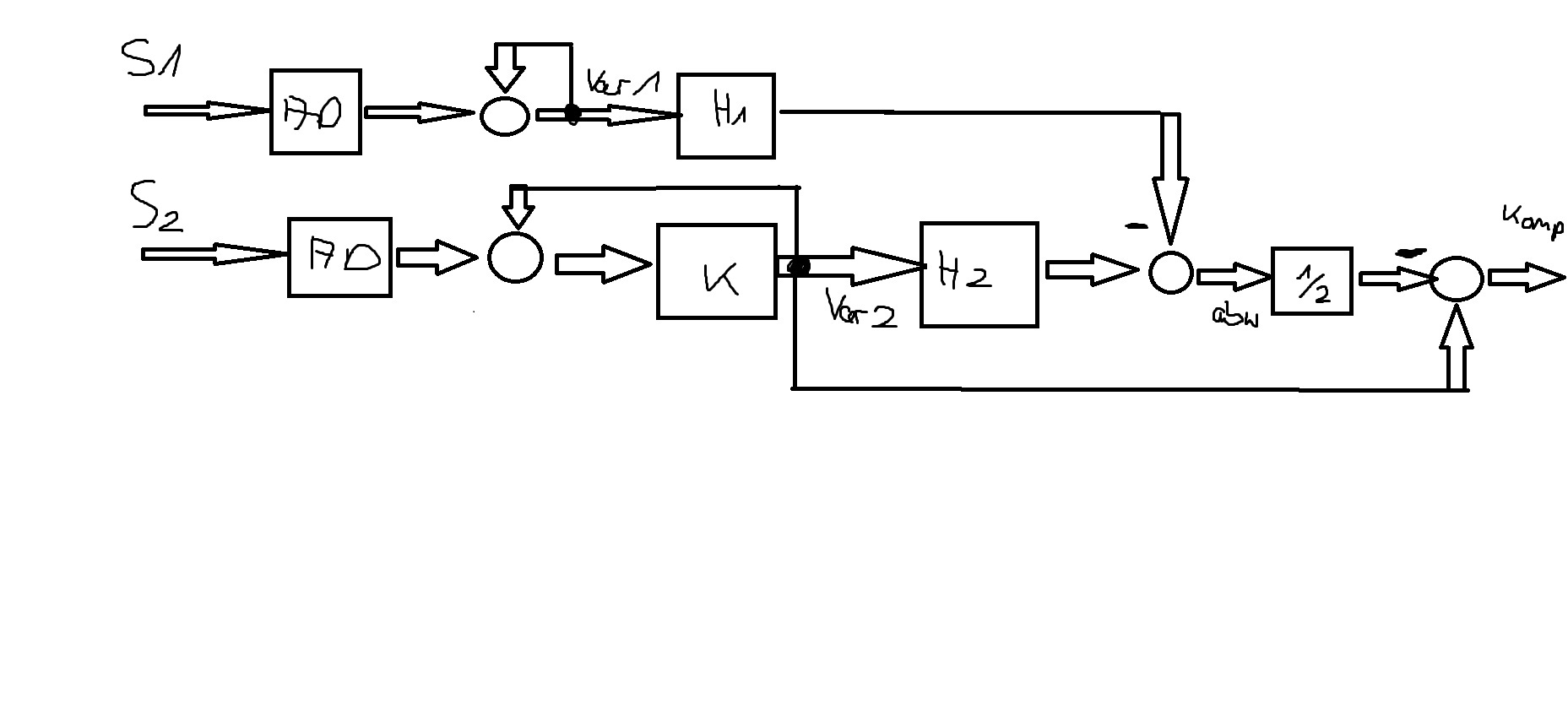
Hallo, ich hoffe das richtige Forum getroffen zu haben...Ich habe das Problem, dass ich für ein Projekt für eine vorhandene digitale Regelung einen Regelkreis aufstellen (und dann analysieren) möchte, bislang aber nur mit analogen LTI-Systemen gearbeitet habe, nicht mit zeitdiskreten. Deshalb möchte ich kurz das System umreißen und dann mein Problem genauer darlegen: Das System wird über eine SPS mit einem Takt von 1,75ms (d.h. das Programm wird alle 1,75ms neu abgearbeitet) gesteuert. Jetzt habe ich zwei Sensoren die in verschiedenen Zeitintervallen abgefragt werden: Sensor1 liefert alle 1,75ms einen neuen Wert, dieser wird auch entsprechend oft gelesen und verrechnet. Sensor2 wird nur alle 329ms ( 329ms = 188*1,75ms) gelesen, jedoch nicht direkt komplett weiter mit den Daten von Sensro1 verrechnet, sondern es wird gewartet bis noch ein zweiter Wert ausgelesen wurde. Dieser wird mit dem vorher gelesenen verrechnet und erst dann mit den Werten aus Sensor1. In Gleichungen ausgedrückt: alle 1.75ms: var1 = var1 + Sensor1 alle 329ms: Sensor2 = k_korr * Sensor2 //AD-Signal wird mit Korrekturfaktor multipl. var2 = var2 + Sensor2 alle658ms: abweichung = var2 - var1 komp = var2 - abweichung/2 am Schluss(also noch immer 658ms) wird komp mit var1 und var2 gleichgesetzt um ein und dieselbe Ausgangssituation wieder zu haben: komp = var1 = var2 Ich bin mir jetzt ziemlich unsicher wie ich das genau mit Haltegliedern etc modelieren muss. Ich habe im Anhang hochgeladen wie ich es mir bislang gedacht habe. Muss ich die AD-Wandlung so einbringen, oder kann ich die Fehler durch sie vernachlässigen? Wenn ja, welche Entscheidungskriterien gibts dafür? Google war bislang nicht sehr informativ in dieser Hinsicht. Reichen die beiden Halteglieder H1 und H2 aus? Ich hätte bei beiden eine Haltezeit von 658ms eingesetzt. Muss ich bei den Rückführungen noch weitere Halteglieder einbringen um zu zeigen, dass das Signal von Sensor1 alle 1,75ms und von sensor2 alle 329 aufaddiert werden? Hoffe ich habe alle notwendigen Informationen bereitgestellt, ansonsten bitte nachfragen! Bin für jeden Hinweis sehr dankbar! Vielen Dank im Voraus Grüße chm
Angehängte Dateien:
-

Regelkreis.png
48 KB
Die Z-Trafo ist aber bekannt ? Da substituert man Z:=exp(sT) oder so.
also die z-trafo ist nicht das problem, da hab ich genug unterlagen etc drüber. mir gehts erstmal darum, dass ich den regelkreis zeitdiskret richtig // vernünftig aufgestellt habe mit den haltegliedern usw.
Wenn das ganze System viel langsamer wie das Sampling ist, kann man das System ja mal zeitkontinuierlich betrachten. Noch einfacher ist eine Simulation mit irgendwelchen Werten.
hm, kann ich bei der zeitkontinuierlichen Betrachtung dann die Verzögerungen mittels Totzeitgliedern modelieren?
Hi,
erstmal herzlichen Dank für deine Unterstützung! Ich habe die
Halteglieder jetzt einfach als Totzeitglieder eingerechnet. Außerdem
habe ich aus der Aufaddition von S1 ( Var1 = S1 + Var1) eine Integration
gemacht. Damit komme ich auf:
var1 = integral(S1 * AD1 dt) in Grenzen von t0 bis t1
var2 = K*(s2*AD2 + var2) --> var2 = S2*AD2*K / (1-K)
abw = f(t-T02)*(S2*AD2+var2)*K - f(t-T01)(S1*AD1+var1)
komp = var2 - 1/2 *abw
--> komp = S2*AD2*K *[ 1/(1-K) - 1/2 * f(t-T02)(1+K/(1-k))]
+ 1/2*f(t-T01)(S1*AD1+var1)
mit L{ f(t-T0) } = e^(-jwT0) folgt dann
Komp(s) = S2*AD2*K* [ 1/(1-K) - 1/2 * (1+ K/(K-1) )* e^(-jwT02) ]
+ 1/2*S1*AD1* e^(-jwT01)*(1 + 1/s )
Das heißt ich habe nur Konstanten und ein I-Glied in meiner
Übertragungsfkt. Stimmt das bislang so oder habe ich mich verrannt? Über
die AD-Wandlung ist mir leider nicht viel bekannt, kann ich das einfach
als eine Konstante mit einrechnen, oder kann ich es auch gleich 1
setzen? Oder muss ich die Wandlung auch als Totzeitglieder einbauen?
Vielen Dank und viele Grüße
chmbw
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.