Hallöchen Habe eine Steuerung für BLDC_Motore entwickelt. Läuft soweit sehr gut. Aber ab und zu läuft einer der Motore nicht an. Schaltungbeschreibung : Atmel uC mit 6 PWM Kanäle. Einlesen der 3 Hallsensoren und per Software werden die PWM aus und einschalten. z.B.: Q4 fix geschaltet, Q1 mit PWM-Signal angesteuert. Q2 negativ zu Q1 um Gegeninduktion kurzzuschliessen. Um beim Anfahren ein Getriebespiel auszugleichen, starte ich den Motor mit extrem geringer Leistung ( damit der Motor anläuft bis Getriebespiel beseitigt ) Wenn der Motor dann auf Drehzahl gehen soll, läuft er nicht an und der uC meldet einen Fehler. Wenn ich die Motor gleich hochfahre passiert es nicht. Leider kann ich es zur Zeit nicht mehr nachvollziehen um den Fehler zu finden. Das Gerät läuft aber unbemannt und es ich natürlich dumm wenn das Teil dann wieder mal stehen bleibt. Kann mir da jemand einen Tipp geben wie dieses Verhalten verhindert werden kann. Danke Euch. mfg Mandi
Angehängte Dateien:
-

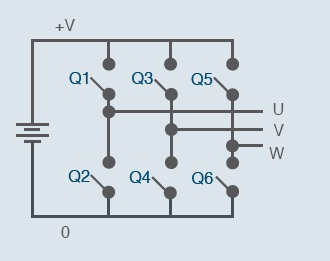
BLDC_FET.png
35 KB
Ist beim Anfahren die Regelung über die Gegen-EMK schon zugeschaltet? Die macht vielleicht Probleme. mfg mf PS: Ach was schreib ich denn fürn Quatsch! Du hast ja Hallsensoren verbaut. Dann kannst du den Motor natürlich sofort starten, die Geschwindigkeits-Sollnachführung hat anfangs hoffentlich eine Anfahrrampe.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.