Hallo, ich suche dringend einen Drucksensor. Bei einem Bekannten habe ich einen "SCC30AD2" Drucksensor gesehen. Wer kennt den Hersteller ? Wer hat ein Datenblatt ? Bitte helft mir - Sorry wenn Euch das zu OT ist .... soll es nicht wieder vorkommen ... Gruß UBoot-Stocki
Hi Retro, diese Seite kenne ich bereits. Die haben recht gute Aufnehmer... Ich möchte trotzdem gerne wissen welcher Hersteller den "SCC30AD2" macht. Gruß UBoot-Stocki
Hy Sensym stellt diese Sensoren her. Hier der Link: http://www.sensor.com.tw/sensym/scc.pdf Hast Du den Sensor von Brüggens Seite? Ich plane auch grad einen Tifenregler mit Mikrocontroller(avr). Es würde mich interessieren wie weit Du vorangekommen bist. Gruß Zoltan
SCC30AD2 :16.60 Preise verstehen sich netto zzgl. MwSt. sowie Porto und Verpackung (Das Teil ist aber nur für Luft konzipiert) Gruß Zoltan
Hey Zoltan, Klasse !!!! wie hast Du das denn gefunden ?! Mein Projekt Teil sich in zwei Teile: 1.) Die Steuerung des Pressluftsystems mitels AVR 2.) Die Tiefensteuerung. Status zu 1.) Wie Du an hier (http://www.mikrocontroller.net/forum/read-4-7047.html) sehen kannst, habe ich die wesentlichen SW-Komponenten fertig. Diesen (http://www.mikrocontroller.net/forum/read-1-7640.html#7640) FET habe ich inzwischen auch aufgetrieben und getestet. Jetzt muß ich "nur" noch die HW zuammenbauen und das ganze testen -> Winter 2002. Status zu 2.) Dazu brauche ich einen Sensor. Norbert benutzt genau den von Dir entdeckten. Einige gute Ideen üfr die SW habe ich aus diesem Thread (http://www.mikrocontroller.net/forum.php?action=read&forum=1&id=6490). Mehr ist aber noch nicht passiert. Ich habe noch zwei "Zwischenprojekte" in der Werft. Mal sehen wie es voran geht -> Frühjahr/Sommer 2003. Wie ist denn der Status Deinerseits ? Gruß Andreas
Hallo Uboot-Stocki, 1.) zu dem Drucksensor noch mal: Ich hab grad drei Stück bestellt Die Firma http://www.sensortechnics.com/ stellt die Teile her, nicht Sensym(?). Wie auch immer. Brüggen hat den Sensor, glaube ich, direkt an den Mikrocontroller angeschlossen. Sollte man aber die Ausgangsspannung (beträgt bei 2 bar max 150mV) nicht verstärken? Ich werde dies mal testen und dann hier posten. Ich muss aber an dieser Stelle zugeben, dass ich noch keine Ahnung von Mikroconrollern habe. Ich versuche mich grad zu orientieren. Aber bei der riesigen Auswahl...Ich dachte an einen MC von Atmel. Aber wie goss muss z.B. der Speicher sein? Als Beispiel Ein Atmega8l-8pc kostet zb 9.30 Ein At90s8535 10.20 Ein Atmega128-16AC 27.10 http://www.simons-elektronik.de/ Für den dreifachen Preis bekommt man hier ZB 128kB anstelle 8kb. Ob man soviel braucht, wohl eher nicht. Und was ist der Unterschied zwischen At90S8535 und Atmega8L-8pc? Ja einer ist billiger :). Welche Programmiersprache soll ich "lernen", dachte an C...aber ich stehe grad echt im Dunklen. (?????????) 2.) Zu der ganzen Regelung braucht man auch einen Neigungsensor. (http://5533.rapidforum.com/topic=101886303450). Auf dieser Seite habe ich meine Eigenentwicklung beschrieben, + ein Bild von meinem Boot (zu85% fertig). 3.)Hier noch eine Adresse, welche Dich bestimmt interessiert: (http://www.gloomy-place.net/microcon.htm) Ich benutze übrigens auch Pressluft. Hierfür habe ich eine Proportional steuerbare Regelzelle "entwickelt". Mittels zwei Fototransistoren und einer LED, die in einem Reagenzglas auf und ab bewegt werden können, wird ein um das Reagenzglas angebrachter Schwimmer erfasst. Das Ganze wird von einer Elektronik ausgewertet und diese steuert die Magnetventile zum Tuchen, Auftauchen... Aber das hier ist ja ein Forum für MCs. Fände es echt Toll, wenn Du mir Deine Erfahrungen mit AVR schildern könntest, wo man da am Besten Anfangen soll... Grüße Zoltan PS: wir könnten ein Paar Bilder per Email austauschen??
Hi, ich habe mit Microcontrollern vor ca. 1/2 Jahr angefangen. Ich habe mich sehr schnell auf die Atmel-Controller eingeschossen. Die Gründe sind: - Wenig bis garkeine externen Bauteile - Leicht verfügbar - Sehr guter Support im Netz z.B. von dieser Seite Mein Experimental-Board habe ich selbst gebaut. Anfangs war da nur der Controller und ein Quarz drauf. Je nach Bedarf kamen serielle Schnittstelle, LEDs etc. dazu. Ich habe bisher mit den A90s4433 sehr gute Erfahrungen gemacht: Viel Speicher, viele Ports, AD-Wandler ... Alles was ich brauche. Sprache? Assembler !!! Warum? Ich bin der Meinung, daß C gut geeignet ist, wenn man viel Algorithmus abbilden muß (Rechnen, mit String spielen etc.). Ich muß im Moment nur Pulse erzeugen (Servos etc.) das geht mit Assembler gut zumal meine Programme nicht soo lang sind ... Gruß UBoot-Stocki
guten tag UBoot-Stocki ich suche eine schaltung mit der ich einen 12V getriebemotor wie ein servo betreiben kann kannst du mir da weiterhellfen gruß reiner
Angehängte Dateien:
-

servo.jpg
71 KB
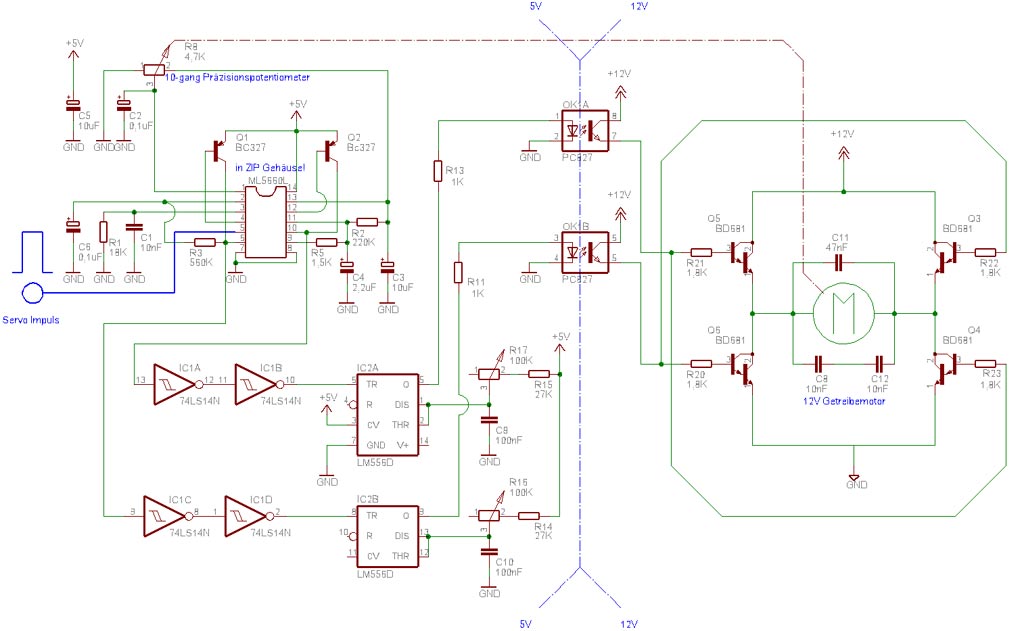
Hallo Reiner, ich benutze in meinem Modell auch 12V Getriebemotoren als Servos. Die Getrieb habe ich vom Conrad, aber die original Motoren (6V 3Anker) sind durch Motoren mit 5 Anker und 12 V Betriebsspannug ersetzt worden (auch von Conrad). Zur Schaltung, siehe Anhang: Die Empfänger-Impulse werden von einem standard Servo-IC des Typs LM51660L verarbeitet. Diese IC liefert dann die Signale an zwei Schmitt- Trigger, wobei der zweite nur als negator arbietet. Anstelle von diesen zwei (hatte grad nur solche zur Hand) könnte man auch einen nicht invertierenden Schmitt Trigger benutzen. Der NE556 triggert die Signale nach. Und Warum? Weil der LM51660L die Eigenschaft hat, in der Nähe der Soll-Position die Servos zu verlangsammen. (Übrigens: Die Pulse, mit denen die Servo-Motoren angetrieben werden haben die gleiche Frequenz, wie die Pulse ,welche der Servo erhält, also ~50Hz. Die Servo-ICs arbeiten als kleine Fahrtregler. Sie können die Länge verändern, bis keine Pulse mehr vorhanden sind, sondern nur noch die reine Versorgungsspannung an den Motor anliegt--> Servo dreht sich mit max Geschwindigkeit. kommt der Servo dann in die Nähe der Soll-Position, dann werden diese Pulse immer kürzer (bis auf null). Auf diese Weise wird erreicht, dass der Servo nicht über das Ziel hinausschiesst) Bei langen Zahnstangen als Getriebe verlangsammt der Motor dadurch dermassen, dass es eine Ewigkeit dauert, bis die Soll-Position erreicht ist. Man kann mit dem Poti ein bischen herumexperimentieren, dann ist die Wirkung verständlicher. Der NE556 kann auch durch zwei Transistoren erstetzt werden, welche die Optokoppler dann direkt antreiben. Auf der rechten Seite ist der Leistungsteil (H-Bridge) aufgebaut. Sie ist von den 5V der restlichenn Schaltung durch die Optokoppler getrennt und arbeitet mit 12V. Die Kondensatoren dienen zur Entstörung. Die Transistoren hatte ich auch Zuhause, deswegen der Typ BD681. H-bridges siehe Internet. So sieht das ganze dann fertig aus: http://ngrad.bei.t-online.de/Bilder/DSCN3037.jpg Gruss Zoltan
{kind=link}
hey zoltan..wow sieht echt gigantisch aus..:)....mal ne frage was machst du damit..??
Mit den Servos?? Ein U-Boot steuern. http://ngrad.bei.t-online.de/index.htm (mein HP, noch incl. Rechtschreibfehler :))
hallo zoltan das ist ja ne ziemlich große und kompakte einheit und danke für die info über die ansteuerung des 12V getriebemotors
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.