Hallo, meine Spätlese ist fast alle und ich hab' für heute noch eine Frage: Meine "Apparatur" hat die schöne Eigenschaft, daß ein bewegliches Teil an einem kapazitiven Näherungsschalter vorbeifährt. Dieser erzeugt dann ein Signal. Wenn das bewegliche Teil zurückkommt und wieder am Sensor vorbeistreift, dann soll das dabei erzeugte Signal ein zweites bewegliches Teil ansteuern. Dieses zweite verhält sich genauso, bei seiner Rückkehr streift es auch an einem Sensor vorbei, der wiederum das erste bewegliche Teil ansteuert. So geht das, wenn nicht unterbrochen wird, hin und her. O.K. Man sieht, jeder zweite Puls ist ein Steuerimpuls. Ich könnte ja die Pulse pro Sensor zählen und dabei jeden zweiten Puls als Steuersignal ausgeben. Aber.... was wenn der Saft mal wegbleibt und die beweglichen Teile weiterlaufen und dabei ein Puls nicht gezählt wird, weil der µC keinen Saft hat? Die beweglichen Teile bei Spannungsausfall anzuhalten geht nicht. Jedes Teil wird von einem separaten µC gesteuert. Nur die jeweiligen Sensoren sitzen bei dem anderen beweglichen Teil, damit eine gegenseitige Steuerung erfolgt. Vielleicht wird kalr, worum es geht! Danke für Eure Mühe! Gruß! Andreas
Moin...
> Vielleicht wird kalr, worum es geht!
...äh....nö.
Du hast keine Frage gestellt.
Wenn es dir darum geht die Position der "Teile" zu bestimmen muss de
r MC ohne Saft naturgemäß passen.
Warum eigentlich immer diese Verklausulierung? Wenn du beschreibst was
da wie wolang fährt könnte man ja mal den Denkhut rausholen und sehen
wie man die "Teile" findet. Wenn das denn dein Problem ist.
--
Sven Johannes
Ergänzung: Es geht darum, wie ich ihne größeren Aufwand nur die zweiten Schaltimpulse des Näherungsschalters durchlassen kann, ohne auf den ersten Impuls, der unweigerlich entsteht, zu achten. Ist es vielleicht möglich, irgendwie, -was, -wo zu bauen, damit man erkennt, aus welcher Richtung das bewegliche Teil kommt? z.B. fährt von links nach rechts, Sensor gibt Impuls, wenn es vorbeifährt. Darf nix passieren. Dann fährt es von rechts nach links, Sensor schaltet wieder, jetzt muß aber was passieren. ... Den Sensor für den ersten Durchgang spannungslos zu machen, ist nicht möglich, da dies einen zu hohen Zusatz-Aufwand bedeuten würde. Gruß, der Verklausulierer... :-)
nimm halt zwei Sensoren, dicht nebeneinander dann kannst du auswerten welcher zuerst angefahren wurde und entsprechend reagieren. Jürgen
Angehängte Dateien:
-

Skizze_Balghebel.jpg
15 KB
{kind=link}
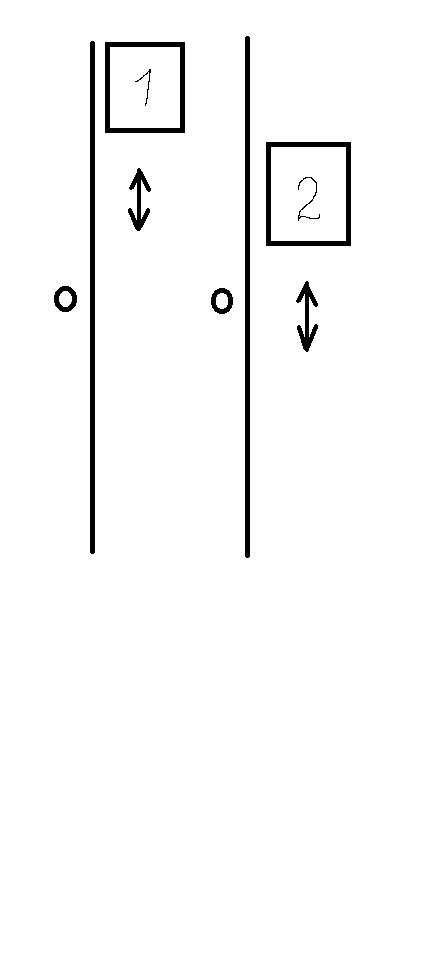
Hallo! Also, im Anhang nun eine Skizze. Die numerierten Teile stellen die über den Antrieb bewegten "Wägelchen" dar. Die Linien sind der Weg, den die Teile überfahren. Die kleinen Kreise stellen die kapazitiven Näherungssensoren dar. Wagen 2 fährt gerade nach unten. Es fahren niemals beide gleichzeitig nach unten, immer nur einer. Wenn 2 am Sensor vorbeikommt, dann gibt der ja einen Schaltimpuls. Dieser Schaltimpuls dient dazu, Wagen 1 in Bewegung zu setzen. Nur darf dies erst geschehen, wenn Wagen 2 wieder von unten nach oben fährt, also auf dem Rückweg. Der erste Impuls, der beim Weg von oben nach unten entsteht, muß ignoriert werden. Also erst der zweite Impuls ist maßgebend, dann fährt Wagen 1 an, während Wagen 2 seelenruhig in seine Ausgangslage zurückkehrt. Bei Wagen 1 gilt dasselbe. Erst auf seinem Rückweg von unten nach oben darf das Sensorsignal Wagen 1 ansteuern. So geht das hin und her, bis man von außen den µC abschaltet. Beide Wagen haben einen separaten µC ohne Interaktion. Es wird lediglich der Sensor des einen an die Wegstrecke des anderen montiert. Ich hoffe, daß es jetzt klarer wird. Oder??? Gruß, Andreas
Jürgen hat es schon genannt, nimm 2 Sensoren für jeden Wagen und jeweils ein FF oder mit c ein Progr. Runter setzt, rauf setzt zurück und generiert einen Auslöseimpuls. Anders geht es garnicht wenn dem µC der Saft wegbleibt außerdem ist so sichergestellt, daß bei einmaligem sensorverlust nicht alles ewig umgekehrt abläuft. MfG Manfred Glahe
Wenn es Informationen darüber gibt, in welche Richtung sich ein Wägelchen bewegt (Motorspannung o.ä.), dann würde es auch mit nur einem Sensor gehen. So wirst du wohl entweder einen ziemlich grossen Block-Kondensator gegen den Stromausfall benötigen oder einen weiteren Sensor für jedes Wägelchen.
@Rahul: Wenn der Wagen nach unten fährt, wird er angetrieben. Ich habe also vom µC ein Steuersignal. Nach oben fährt er alleine (Gegengewicht). Mein µC macht also nix. So hätte ich eine Bedingung. Allerdings muß dies der eine Proz dem anderen mitteilen, weil ja jeder Wagen seinen eigenen µC hat. Und dies wollte ich eigentlich vermeiden. Aber es ist sicher günstiger einen Draht zwischen den beiden zu verlegen, als gleich zwei zusätzliche Sensoren zu kaufen! Gruß...
Optokoppler am Motor-Schaltausgang, dessen Ausgang dann auf den Steuer-µC. Auf jeden Fall billiger als weitere Sensoren...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.