{kind=link}
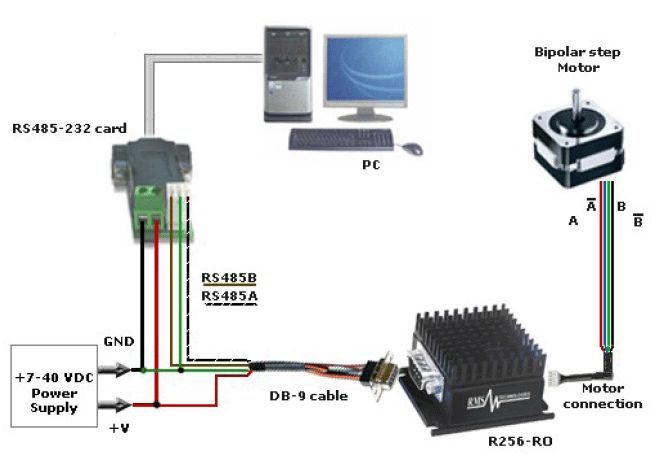
Hallo! Ich bin ganz neu hier und würde mich sehr freuen, wenn ihr mir bei meinem Problem helfen könntet. Es geht um Folgendes: Ich möchte die Position eines kleinen Motors über meinen PC steuern. Das Ganze ist wie im angehängten Bild aufgebaut. Es gibt folgende Komponenten: - Einen Controller, der die Befehle vom PC entgegen nehmen soll, um den Motor zu steuern. - Einen Adapter, der diesen Controller mit dem COM-Port des PCs verbindet. Er ist außerdem mit dem Netzteil verbunden. - Einen Motor, der über einen 4-Pin Adapter mit dem Controller verbunden ist. Ich habe es entsprechend der angehängten Darstellung aufgebaut. Das Problem besteht darin, dass sich der Motor nicht bewegt, wenn ich die entsprechenden Befehle eingebe. Ich weiss leider nicht mal, ob die einzelnen Komponenten überhaupt erkannt werden und daher auch nicht, ob sie überhaupt funktionieren. Ich weiss nur, dass mit dem COM-Port alles in Ordnung ist. Das habe ich getestet. Was kann ich tun? Wieso klappt das Ganze nicht? Braucht man denn eigentlich keinen Treiber für den Controller? Es liegt nämlich auch keiner dabei. Es sollte doch ausreichend sein, den Controller mit HyperTerminal zu steuern, oder? Oder habe ich irgendetwas Grundlegendes übersehen? Ich freue mich über jegliche Hilfestellung und danke euch bereits vielmals im Voraus! :-)
Angehängte Dateien:
-

mc01_copy.gif
66 KB
Ein Link zu einem Datenblatt des Treibers wäre hilfreich Bitte prüfen: - stimmt die eingestellte Baudrate und sonstige Parameter wie Handshake deines Terminal-Programms - Gibt der Controller Antwort? - Rx/Tx vertauscht? - Korrekte Befehle gesendet?
Hallo und Vielen Dank für deine Antwort! :-) > Ein Link zu einem Datenblatt des Treibers wäre hilfreich Welchen Treiber meinst du? Sollte der Controller einen Treiber haben? Es handelt sich um den folgenden Controller: http://www.rmsmotion.com/ecart/part_detail.aspx?catID=2&partID=44 Und das ist sein Datenblatt (sein Manual): http://www.rmsmotion.com/resources/R256_Manual_v1_05_833835.pdf > Bitte prüfen: > - stimmt die eingestellte Baudrate und sonstige Parameter wie Handshake > deines Terminal-Programms? Ja, ich habe die Parameter nach dem Manual eingestellt. Was ein Handshake ist, weiß ich ehrlich gesagt leider nicht, habe gerade bei Wikipedia nachgesehen, aber müsste mich da noch mal genauer informieren. > - Gibt der Controller Antwort? Das wäre schon mal super. Weißt du, wie ich das prüfen kann? > - Rx/Tx vertauscht? Wäre das dann eine Vertauschung von Kabeln? Das kann ich ausschließen, habe alles exakt nach der Anleitung aufgebaut. > - Korrekte Befehle gesendet? Ja, die Befehle sollten ebenfalls korrekt sein. Nochmals danke im Voraus!
Wie sprichst du den Controller denn an? Das einfachste wäre ja erstmal eine Verbindung mit einem Terminal-Programm aufzumachen. Da siehst du direkt, ob der Controller antwortet. Mit freundlichen Grüßen Thorsten Ostermann
> Ein Link zu einem Datenblatt des Treibers wäre hilfreich >>Welchen Treiber meinst du? Sollte der Controller einen Treiber haben? Es >>handelt sich um den folgenden Controller: Mit Treiber ist hier der Controller gemeint (auch Motortreiber genannt). Probier doch mal in Hyperterminal bei 9600 baud : /1& Und lies mal dies :http://www.rmsmotion.com/resources/IMC17%20and%20R256%20commands_v1_13_651928.pdf
Hallo und vielen Dank für eure Antworten! :-) Ich habe das System nun doch zum Laufen gebracht. Ich hatte einen Fehler bei der Verkabelung gemacht und dachte der Controller würde auch Strom über die Datenversorgung beziehen (ich wusste nicht, dass diese Kabel explizit für Daten vorgesehen sind). Ich habe also offenbar noch viel zu lernen :-) Bis dann und Viele Grüße...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.