Hallo @All Ich habe vor mir einen kleinen Roboter zu Basteln mit der "intelligenz" eines AVR. Die Motoren werden über eine "H" Schaltung betrieben ( Vor/Zurück). Man kann Sie wahltweise über PWM oder direkt betreiben. Es sind kleinere E-Motoren mit einer Spannung von 3V Maximum. Meine Fragen Dazu. Ich habe vor 2 LDR`s daran zu betreiben (Photowiderstände). Kann ich Sie an den AVR direkt anschließen und über den 8 Kanal A/D Wandler nutzen ?. Kann ich dazu auch den "Comparator" für die Messungen dazu verwenden um bei bestimten Werten die Motoren zu Steuern ? Über eine Festfrequenzgeber (40 khz) werden auf 2 Sender aufgeteilt regelmäßige "Impulse" ausgegeben ( Ähnlich Echolot Prinzip bei einer Fledermaus). Kann ich die Empfänger auch direkt an den AVR anschließen und entsprechend Programmieren um somit die Motoren entsprechend zu Steuern ? Das Gleiche gilt bei 4 Sende und Empfangs IR Einheiten. Diese sollten in geringer Bodenhöhe eine Linie abtasten und dieser dann in der entsprechenden Geschwindigkeit folgen. Wer kann mir ne Info dazu geben ? Gruß Gerd
hi Gerd, Die LDR's kannst Du direkt an den Ports betreiben. Du solltest aber zusätzliche Pullup's oder Pulldown's je nach Beschaltung vorsehen. Die AVR-Internen Pullup's könnten zu hochohmig sein. Außerdem sind interne Widerstände in MOS-Technik sehr ungenau. Echolot: Wie sieht denn so ein Empfänger aus? Nur ein Ultraschallmicro? Wenn ja, brauchst Du einen Verstärker um die Signale dem AVR mundgerecht aufzubereiten. Die Timereingänge würden sich für eine Laufzeitmessung des Schalls gut eignen. AVR sendet Impuls -> startet Timer -> Rücklaufender Schall stoppt Timer -> Timerzeit=2*Entfernung Reiner
Re Reiner Ja genau ,so hatte ich es mir vorgestellt. AVR den Internen Timer nutzen dazu :-). Ein weiterer Gedankenweg wäre dann über Infarot. IR Sendediode mit einem IR Empfänger (z.B. Bewegungsmelder) Dann darüber den Abstand zum Gegenstand messen. Wäre dem Ultraschall gegenüber nicht so Empfindlich zu Resonanzen und Störquellen. Was meinst dazu Reiner ? Gruß Gerd
Erstmal zu den IR-Abstandsmesser: Das ist sehr schwer zu realisieren. Die Laufzeit vom Licht scheidet hier wohl aus (irrsinnig kurze Zeiten/Dopplereffekt). Und über die Reflektion eine Entfernung messen ist aus Gründen der unterschiedlich farbigen Gegenbstände, die im Weg liegen könnten ebenso zu ungenau. Es gibt zwar Chips die auch auf kurzen Strecken die Lichtlaufzeit messen, aber soweit ich weiß sind diese nicht so einfach erhältlich, da diese aus den militären Entwicklungsschmieden stammen. Es hat wohl schon so seinen Grund warum nun fast jeder Neuwagen diese Einparkhilfen als Ultraschall hat. Ja, Du wirst mit den Störsignalen schwer zu kämpfen haben. Es gibt zwei Möglichkeiten - entweder Du besorgst Dir eine fertige Einparkhilfe (gibt es glaub ich bei Conrad kotz mir wir immer übel wenn ich das große C sehe :) ) oder Du versuchst es selbst. Wenn Du ein Scope besitzt (ist ja nicht selbstverständlich) siehst Du womit Du es zu tun hast. Die Störungen welcher Art auch immer sollten Dir bekannt sein. Blindes drauflosentstören hilft da nicht. Eine ganze Menge an Störcharacteristik könnte der AVR durch geschickte Programmodule ausfiltern. Ein Teil allerdings müsste schon bei der Signalaufbereitung des Echos passieren - Bandpassfilter, Verstärker, Bergrenzer etc. Ich bin sicher das davon Info'S im Netz herrumliegen. Ähm.. Du bist doch der, der die AVR's in Assembler bändigen will - oder. Ich will Dir ja nicht unterstellen das Du das Vorhaben mit dem intelligenten Robi nicht hinbekommst, aber Du mußt echt Mut haben das in Assembler zu versuchen. Sicher, in C kostet das mehr Memory, doch komplexe Abläufe aufzubauen und nach drei Tagen auch noch zu verstehen was man denn da so in ASM produziert hat, kann einem schon den Verstand rauben. Dennoch das ist nur meine Ansicht - das heisst natürlich nicht, das es unmöglich ist. Eine IG sieht das bestimmt mit anderen Augen, da ja jeder in seiner kleiner Welt lebt beschränken sich die Ansichten und Beurteilungen einzelner leider. Gruß Reiner
Hallo, mobile Roboter ist so eine große Sache, Du mußt mal ein bischen Googeln, zu Ultraschall gibt es Ingeneurarbeiten, oder Webseiten zu Robotern, Roboterwettkämpfe... z.B. www.roboterwelt.de z.Z. gibte es eine sau teure Zeitung für Kids mit einem mobilen Roboter zum selbst zusammen schrauben. www.real-robots.de Ich habe auch sowas angefangen. Z.Z. bin ich beim Motorcontroler. Des soll mal über I2C oder SPI mit einem Master gekoppelt werden und auch über RC Fernseuerung funktionieren. Gruß Mike
Re Reiner und Mike Das mit den Störresonanzen hatte ich schon füher bemerkt an meinen kleinen Roboter den ich schon Besitze. Mike hatte den Distributor schon genannt. Ich versuche zwar die Resonanzen korret festzustellen ,hab aber so meine Problemchen.Das Gehäuse ist aus Plastik und die Motoren sind einfache DC Spielzeugmotoren die entsprechende Frequente Störimpule an das Gehäuse aussenden. Die Sender und Empfängereinheiten sind zwar mit etwas Selbstklebenden Schaumstoff ummantelt,hilf aber nicht dabei die Ultraschallsignale Korrekt auszuwerten.Es kommen immer noch genug Störimpulse vom Gehäuse an den Empfänger rüber. Mit einem Hochpassfilter versuche ich den Werten etwas näherzukommen und will dann damit den Freqzenzbereich von 0-20 Khz "Abschneiden" .Alles was darüber geht soll als Signal verwertet werden. Dies ist meine Vorstellung. Gruß Gerd
@Gerd Versuche lieber ein enges Bandpaß, das auf den US abgestimmt ist. Du kannst dann mit einer hohen Güte des Filters gleich eine schöne Verstärkung rausholen und die nahen HF Störungen sind auch gleich raus. Teile das Filter aber bei höherer Ordnung gleich in mehreren Stufen, es wird stabiler und Du bekommst auch das was Du erwartest. Genaue Filter mit mit wenigen Bauteilen ist meist sehr teuer. Also teilen. Bedenke aber das ein Filter hoher Güte (großes Q) eine lange Einschwingzeit besitzt. Dies könnte sich ungünstig auf die Laufzeit auswirken. Hier wirst Du wohl die Einschwingzeit herausrechnen müssen. Kennst Du P-Spice? Ein Tip simuliere die nötigen Filter erstmal auf dem Rechner. Das passt eigentlich immer. Dafür mußt Du aber den günstigsten f0 des US kennen. Reiner
Angehängte Dateien:
-

komplett.gif
43 KB
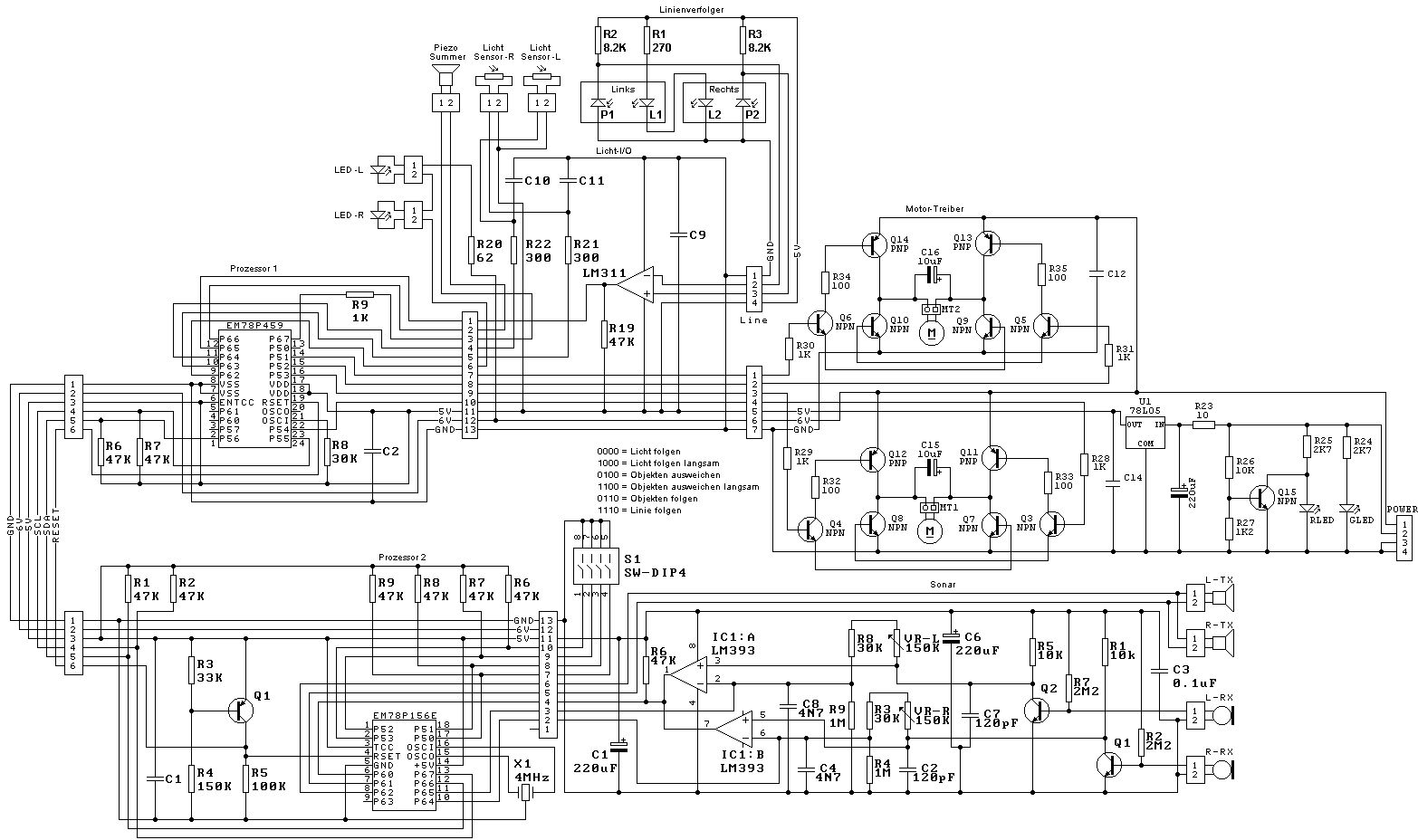
Re Reiner Das Problem mit den Störimpulsen ist nicht nur bei mir der Fall einige "Besitzer" solcher Roboter klagen ebenfalls darüber. einen Schaltplat vom gesamten des Roboters hab ich hier angehängt. Ich hoffe er kann dir nähere Informationen liefern. Beachte hierbei den Sonar Bereich um den es eigentlich geht ( Rechts unten). Die Sendefrequenz hab ich schon herausfinden können. sie liegt bei ca 40 Khz. Einige haben mir auch berichtet das es welche geben soll mit ca 30 Khz Frequenz. Gruß Gerd
Angehängte Dateien:
-

ECHO_BP.jpg
130 KB
{kind=link}
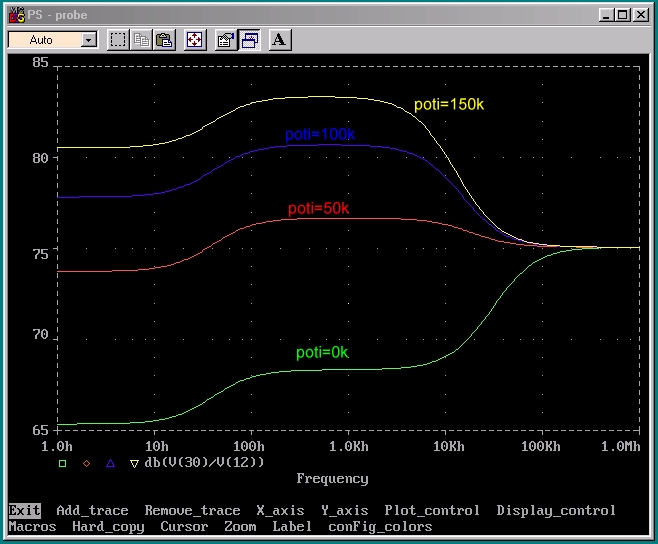
Hi Gerd, ich habe die Eingangsschaltung mal durch pspice laufen lassen und die Kurve(n) sehen nicht so aus als wenn sie das Teil Sonar nennen darf. Somit verstehe ich auch die massiven Störungen. Die Schaltung selbst finde ich ziemlich schwach. Eigentlich sehe ich in der Signalaufbereitung nur Verzerrungen, die natürlich auch Störungen verursachen. Die Simu hab ich rangehängt. Reiner
Hallo Reiner Vielen Dank für die Grafik. Was schlägst du dann als Alternative (ohne großen Aufwand) vor ? Mit den Filtern die ich meinte lässt sich also nur ein Teilerfolg erzeilen ? Gruß Gerd
Hallo Mike Das mit der "Fernsteuerung" ist reativ einfach mit dem "Cybot". Es gibt Fernsteuerbare Autos ,die kosten ca 30 Euro. Es gibt auch preiswertere Varianten mit ca 19-25 Euro.Die Preiswerteren Varianten findest du oft im Im/Exportladen oder als herabgesetzte sonderposten,etc. .Diese Fernsteuerung besteht aus einer Platine .Diese kannst an die Motorsteuerung des "Cybot" anbringen dann ist er halt "Ferngesteuert" :-)). Vor Kurzem hab ich ein Cooles Schnäppchen gemacht. Es gab einen Fernsteuerbaren Panzer der Fa. G. T. Model. Irgentwo hab ich das Teil für 79 Euro gesehen. In dem einen Laden (Im/Export) hab ich das Stück dann für 19 Euro gesehen (gleiches Modell mit gleicher Ausstattung --> Made in China grins). Nach zähem Verhandeln und Simulieren eines Friedlichen ,liebevollen Kunden (der überhaupt kein Interesse am Produkt hatte grins) ließ sich der Verkäufer breitschlagen das Stück für 13 Euro mir zu überlassen.Immerhin eine Ersparnis von über 56 Euro pro Stück. Einer wird gerade "Seziert" auf meiner Arbeitsplatte und die anderen zwei Zieren noch den Schrank im Oberen Bereich als "Modell". Bei dem Einen werd ich mir nen Roboter basteln auf Basis des Antriebes vom Panzer. Viel Platz ist vorhanden und die Bauteile lassen sich Prima für die Projekte verwenden ( Motorsteuerung ,etc.) ,Ein echtes Schnäppchen. der Turm wird demontiert und alles unwichtige Entfernt inkl., der Fernsteuerung.Ich bin am Überlegen ob ich nicht noch 2 für Ersatzteillager holen soll. Dieser Text hat eigentlich nix mit dem Thread hier zu tun ,ist aber nur eine Information für Mike auf seine Frage Gruß Gerd
Ich muss da mal drüber Nachdenken, so ohne Überlegung möchte ich mich dazu nicht äußern ;) Und was heißt ohne viel Aufwand? Wieviel bist Du bereit zu tun? Ein paar Opamps und Caps werden das wohl schon. Reiner
Hallo Gerd, schau mal auf Kai's Raboterpage - http://mitglied.lycos.de/kaisroboter/ das Teil fährt schon. Ultraschall und Infrarot Sensoren. Der Cybot ist ein billiges Kinderspielzeug für viel Geld. Mein Roboter soll mal Rasenmähen, ich weiss das es sowas schon gibt, aber mann will ja was zum basteln haben. Das Chassis habe ich fertig. 2 Motoren mit Getriebe kugelgelagert und Radsensoren alles fertig. Rasen gemäht hat er auch schon (unkontrolliert eben). Mit dem Motorcontroller soll sozusagen der erste Bauabschnitt fertig sein, das Teil soll dann estmal mit meiner Modellfernsteuerung fahren. Im 2. Teil soll dann die Sensorik ran, Temperatur, Feuchte, Ultraschall, Induktionsschleife, Akkukontrolle und Ladestation.... usw. dauert bestimmt noch 1-2 Jahre. Gruß Mike www.mike-tronik.de
Re Mike, Reiner @ Mike Was die Robboterei betrifft ,so Besitze ich von meinen Eigenkonstruktionen (2 Stück) nur noch einen. Bei meinen hab ich keine lautstarken Spielzeugmotoren genommen sondern eher Motoren die echt leise waren gegen diese "Krachmaschine".Daher kannte ich das Problem damals noch nicht. @ Reiner Klingt aufwendig ,ist mir aber die Sache Wert. Vielleicht kriegt man das mit Materialaufwand von maximal 10-20 Euro hin. mit einem kleinen hochpaß´( Kondensator,wiederstand als Filter -->RC Glied) konnte ich etwas Besserung hinbekommen .Aber was willst mit Opamp und Caps dann damit erreichen ?. Was ist dein Lösungsvorschlag ? Gruß Gerd
Hi Gerd, schau doch zum Thema Robotik mal bei www.roboterwelt.de oder www.elektronik-projekt.de vorbei. Da findest du noch mehr Roboterbauer, insbesondere in den Foren von Elektronik Projekt und Roboterwelt. Gruß Markus
Re Gerd, hab noch keine Lösung. Bin noch am rechnen und basteln. Zwar kein mein Sonar schon "sehen" aber ich bin noch nicht zufrirden. Aber Störungen habe ich z.Z keine. Mal sehen wielange ich noch Lust dazu habe. Nun muß ich mir erstmal eine Pulsfolge für den Sonar programmieren. Hierfür werde ich am besten die Platine vom sscope nehmen. Gruß Reiner
Moin Markus Danke für die Doppelt angegeben Links zu den Seiten. Es ist klar das einige auch andere Lösungen schon parat haben oder "alternativben " anbieten. Mir gehts in erster Sache darum selbst mit hilfe durch andere (Teamarbeit) was zu erreichen und auch das soweso ,weshalb ,warum.Wenn ich unter Zeitdruck stehen würde oder das Projekt Ehrgeizig vorantreiben will ,so brauch ich einfach nur die Schaltungen und Informationen von anderen Kollegen zu verarbeiten oder Nachzubauen. Es isr aber nicht der Sinn meinerseits das dazu machen (Nachzuahmen).Wenn kein weiterkommen besteht ,so schlage ich gern in "Unterlagen" nach und sehe mir die Lösungen dazu an. dies ist dann aber für mich die allerletzte Instans und als "Notlösung" zu betrachten. Ich möchte hier dich nicht direkt "Angreifen" oder dich auf irgenteiner weise "Negativ" darstellen. Dazu sollte auch der Text nicht dazu verwendet werden und ist auch nicht so gemeint. Sondern ich Bastel lieber in Eigenregie in zusammenarbeit mit anderen und Entwickle Lösungen zu Problemen oder sammle Tipps wie man was besser macht.Wenn ich auf irgendeiner weise Informationen dazugeben kann ,so werde ich dies gern nach meinem Besten Kräften und ermessen tun. @Reiner Auch guten Morgen zu dir. Falls Interesse an dieser Information betrifft ,so berücksichtige die Frequenz (Band) die "offen" sein sollte. Der Bereich ist von 30-40 Khz zu brücksichtigen. Alles darunter oder darüber ,sollte nicht registrierbar sein. Bei der Pulsfolge für das Sonar hab ich herausgefunden das eine Zeit von 0.1-0.2 Sek aureichend ist. Das System bewegt sich nicht sonderlich schnell voran ,so ist eine schnelle Pulsfolge nicht notwendig. Gruß Gerd PS: Falls ich falsch liege ,bitte ich um korrektur.
Re Gerd Ja, so sehe ich das auch 30..40kHz. Den originalen Eingang habe ich mal aufgebaut. Der hört wirklich alles kein Wunder das da Störungen auftreten. Ausserdem scheit der nur melden das sich überhaupt etwas im Weg befindet. Die Entfernung aber geht nicht daraushervor, die ansteigende Lautstärke des Echos hat mehr effekt als die Laufzeit. Mein Versuch mit einer etwas anderen Schaltung sieht eine recht schöne Hüllkurve vom Echo. Leider sind die US-Wandler ein wenig ungeeignet. Die hab ich mal vor 20 Jahren auf 'nen Grabbeltisch für 10Pfg./Stück erstanden. Das Problem: Zwar rege ich den Sender mit einem Pulspaket von 4 Pulsen zu 36kHz mit einer Wiederholrate von 20ms an. Das Nachschwingen des Senders hält einige ms an und überdeckt das Echo im Bereich kurzer Laufzeiten. Nun werde ich mir erstmal ein paar frische Teile besorgen. Aber ob ich es dann noch diese Woche schaffe wie eine Fleddermaus umherzufliegen.. ich glaub nicht. Hab noch ne Menge vorzubereiteten - Urlaub. Ach ja das mit der Pulsfolge von 100..200ms aus Deiner Mail. Es ist ratsam mit einer höheren Abtastung zu fahren, auch dann wenn es auf dem ersten Blick nicht so nötig erscheint. Du kannst nämlich, wenn mehr informationen pro Zeiteinheit eintreffen Plausiblitätsprüfungen durchführen. Das soll heißen: Ist da denn wirklich etwas im 28cm Abstand? Hmm.. erstmal 8 fach messen Mittelwert vom Abstand bilden oder bleibt der Abstand erhalten, war es vielleicht nur eine Störung?. Du kannst dann viel mehr per Programm auswerten und dann richtig reagieren, wenn ein Überhang an infos zu Verfügung stehen. Ebenso werden Abläufe flüssiger. Reiner
Re Frankl Danke. Probier ich aus, aber das Nachschwingen bleibt sicherlich. Ausserdem muss man den Bandpassfiltern im Empfänger auch eine Chance lassen mitzuschwingen. Wenn die Anregung zu kurz ausfällt, wird auch die Resonanz klein. Z.Z. habe ich 6 Perioden bis der Empfänger voll mitschwingt. @All Die Leute von dem anderen Microcontroller Club haben eine interessante Lösung. Die verwenden einen IR-Vorverstärkerbaustein. Schöne Sache, Filter, Vorverstärker und vermutlich auch ein selbstanpassendes Gain. Das Signal kommt digital heraus und kann direkt weiterverarbeitet werden. Leider komm ich an das Datenblatt nicht ran. Vieleicht hat ja einer von Euch es rumliegen? TDA4050B wird wohl Siemens sein. Reiner
Hey, danke Mike! Ich habe ein Problem mit C....d, danke das Du für mich die Drecksarbeit gemacht hast :-) Gruß Reiner
Geht klar! Must Dich nur ein wenig gedulden, ich hab Ende Woche zwei Wochen Urlaub - sorry. Reiner
Hi @all Anscheinend ,hab ich hier ins Wespennest gestochen. Vielleicht kann mir jemand mal als Schaltplan den "Entwurf " zukommen lassen was gemeint ist ?. Mit Ir Experimenier ich zur Zeit auch rum ,komm aber zu keinem nennenswerten Ergebnis. Vor Kurzem hab ich von Kemo (Bausatzfirma) einen Abstands warner für den PKW gesehen. der Ist absolut Primitiv aufgebaut aber sehr wirkunsvoll. Ich scann mal das Datenblatt, Bestückungsliste und Schaltplan dazu ein und stells hier mal in diesen Thread rein. Gruß Gerd
Ne Ne. Es ist zwar ein IR-Verstärker, aber der wird mit einem US beschaltet. Da beide ungefähr den gleichen Frquenzbereich haben, eignet sich der Baustein wohl. Was ich aber nicht weiss, sind die Ein- und Nachchwingzeiten vom TDA4050B. Nach dem Urlaub werd ich mir mal ein paar bestellen und probieren. Auf den Kemo bin ich gespannt! Gruss Reiner
@Gerd >Danke für die Doppelt angegeben Links zu den Seiten. >... Hi Gerd, das die Links schonmal gepostet wurden hab ich übersehen. Ich wollte damit eigentlich nur sagen das du dort Leute findest die sich mit Roboterbau auskennen. Die Gelben Seiten helfen da nämlich nicht weiter ;) Ich wollte damit nicht sagen, das du einfach nur die Schaltungen kopieren sollst. Gruß Markus
Hallo Markus Kopieren von Schaltungen ist eigentlich nicht meine Art.anhand voin den Beispielen anderer Orientiere ich mich meistens wies geht. die eine oder andere Änderung fällt meist dann auf wenn die Schaltung auf einem Teststeckbrett fliegend aufgebaut ist. Gruß Gerd
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.