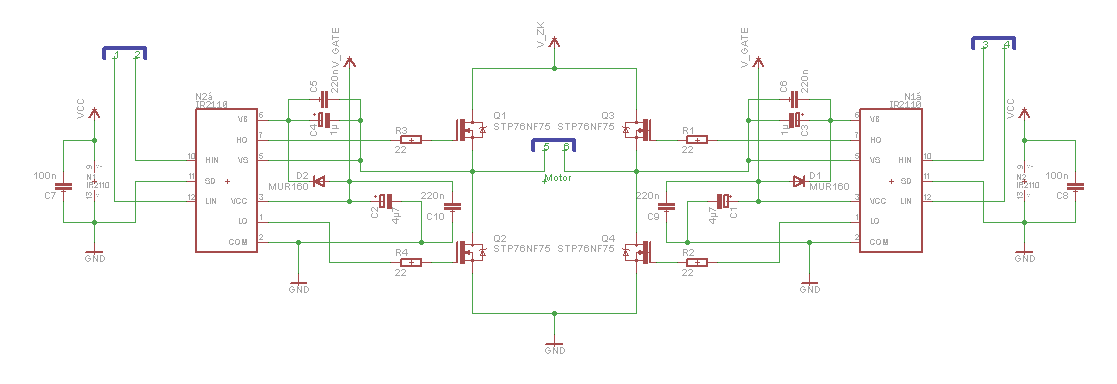
Hallo, ich lese hier schon eine Weile mit, und habe in den Foren schon viele Lösungen für verschiedene Probleme gefunden. Nun aber habe ich eine Verständnisfrage zur Ansteuerung einer H-Brücke, die einen DC-Motor durch Pulsweitenmodulation steuern soll. Im Anhang befindet sich (mehr oder weniger) ein Prinzipschaltbild, zu sehen ist, dass die High-Side Fets über eine Bootstrap Schaltung angesteuert werden. Die Erzeugung der PWM und Steuerung der Treiber (IR2110) werden von einem Mikrocontroller übernommen, und hier ist schon meine erste Frage: Wenn Q4 statisch angeschaltet ist, und ich den Motor drehen lassen will, dann muss ich logischerweise periodisch Q1 einschalten. Da das Gate von Q1 aber durch die Bootstrap Schaltung versorgt wird, befürchte ich, dass der Bootstrap Kondensator sich während der Ausschaltphasen durch die Last nicht ausreichend (wenn überhaupt) aufladen kann. Gibt es hierzu Erfahrungen eurerseits? Ich meine hier übrigens nicht den ohmschen Widerstand des Motors, sondern vielmehr die Verhinderung eines Stromflusses durch eine Induktionsspannung des Motors bei Drehzahlen >0. Als "Alternative" habe ich mir ausgedacht, Q1 und Q2 alternierend (natürlich mit Totzeit) zu schalten, um den Bootstrap Kondensator direkt durch Q2 auf Masse zu ziehen. Hierbei befürchte ich allerdings hohe Verluste im Motor, da dieser ja abwechselnd beschleunigt und gebremst (durch Q2 und Q4 kurzgeschlossen) wird. Klar, der Strom würde ja sowieso nach Abschalten von Q1 ein Weilchen durch die Body-Diode von Q2 weiterfließen, aber was ist nach dem Abklingen des Stromes...? Wäre es eine Möglichkeit, während der Phase, in der Q1 aus und Q2 an ist, Q4 abzuschalten? Somit würde verhindert werden, dass ein Kurzschluss des Motors stattfindet. Nachteile? Gibt es andere, einfache Möglichkeiten? Mich verfolgt das Problem schon länger, vielleicht sehe ich einfach die (einfache) Lösung nicht. Ich habe schon sehr viel im Internet gesucht und gefunden, aber eine wirkliche Klärung des Problems brachte das nicht. Vielen Dank im Voraus
Angehängte Dateien:
-

h-bridge.png
6,2 KB
Die PWM-Frequenz wird so hoch gewählt, dass der Strom aufgrund der Induktivität des Motors annähernd konstant bleibt. So wie ein Kondensator versucht, die Spannung konstant zu halten, versucht eine Spule, den Strom konstant zu halten. Der Motor wird nicht abgebremst, wenn Q2 und Q4 leitend sind, sondern der Strom macht slow-decay. Selbst wenn Du fast-decay machst, wird der Motor erst abgebremst, wenn der Strom abgeklungen ist (und durch active fast decay unter 0 geht). Das dauert aber (je nach Induktivität) wesentlich länger als die PWM-Periodendauer. Denke Dir mal die drei Szenarien durch: - fast rise (Q1 und Q4) - passive fast decay (Q2 und Q3-BodyDiode) - active fast decay (Q2 und Q3) - slow decay (Motor kurzgeschlossen) > befürchte ich, dass der Bootstrap Kondensator sich während der > Ausschaltphasen durch die Last nicht ausreichend (wenn überhaupt) > aufladen kann. Doch, selbst wenn Du Q1 ausschaltest und Q2 nicht explizit einschaltest, wird die Spannung an linken Mittelpunkt low (-0,7V) sein, weil das Weiterfließen des Stromes die Q2-BodyDiode leitend macht. Wenn Du ActiveRectification machst, schaltest Du Q2 ein, damit die Diode vom Fet kurzgeschlossen wird, das ergibt weniger Verlustleistung, ist aber für die eigentliche Funktion nicht nötig. Der Fet leitet dann "anders herum". Im Datenblatt des L6208 ist das recht gut erklärt. Ich verwende als Brückentreiber den HIP4081, der hat eine integrierte Ladungspumpe und kann den HiFet unendlich lange einschalten. Vorschlag: simuliere eine H-Brücke z.B. mit LT-Spice (einfach zwei Rechteckquellen und den Motor dazwischen) und schaue Dir die Spannungen und Ströme an, dann wird Dir einiges klar.
Vielen Dank, jetzt ist mir alles klargeworden. Hatte wohl ein Brett vorm Kopf... ;) Danke auch für den Hinweis auf das Datasheet des L6208, ist sehr gut erklärt! Einen Brückentreiber mit Ladungspumpe bzw. den IR2110 mit DC/DC Converter habe ich mir auch schon überlegt, dies scheiterte aber einerseits am Preis (DC/DC) bzw. der Verfügbarkeit bei Reichelt. Auf das mit der Diode hätte ich auch selbst kommen können... :) Werde nun wohl aktive Gleichrichtung umsetzten um die Verluste zu minimieren, und da ich die Steuerung schon mehr oder weniger nach diesem Prinzip programmiert habe. Nochmals vielen, vielen Dank für deine ausführliche Antwort! Gruß
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.