Guten "Abend", Bekomme meinen Touchscreen an einem ADS7843 nicht so recht zum laufen. MPU: STM32F103 SPI2 ansprechen funktioniert soweit. Lediglich an der Kalibrierung scheint es zu scheitern. Anbei ein Bild des Touchscreens. Evtl. könnt ihr Anhand des Bildes erkennen ob ich die TS Kontakte korrekt an den ADS7843 angeschlossen habe. http://www.pic-upload.de/view-18330990/2013-02-28-23.36.51.jpg.html von Links nach Rechts : X-, Y-, X+, Y+ Somit könnte ich wenigstens einen Anschlussfehler ausschließen. Vielen Dank ! Grüße Dennis
Hallo, Anschluss ist ok. Was kommen denn für Messwerte raus? Sascha
Okay. Zunächst mal vielen Dank ! Also liegt es doch an der Umsetzung. Ich bin leider noch nicht dazu gekommen den Logic dran zu hängen und zu überprüfen was wirklich über die Leitung geht. Ich habe mir folgende Lib angeschaut : http://mikrocontroller.bplaced.net/wordpress/?page_id=564 Dort wurde SPI allerdings via Software über die GPIOS nachgebildet. Da der ADS auf meinem Board an SPI2 ( Hardware ) angeschlossen ist, habe ich "versucht" die Software implementierung auf Hardware zu übersetzen. Werde sie mal posten, vielleicht findet jemand auf den ersten Blick schon einen Fehler: Original :
1 | //--------------------------------------------------------------
|
2 | // interne Funktion
|
3 | // Sendet einen 24bit Frame an den ADS7843
|
4 | // und empfangt einen 12Bit Datenwert
|
5 | //--------------------------------------------------------------
|
6 | uint16_t P_Touch_Frame(uint32_t frame) { |
7 | uint16_t n; |
8 | uint32_t maske_out=0x800000; // 24Bit Maske fuer Data-Out |
9 | uint16_t maske_in=0x800; // 12Bit Maske fuer Data-In |
10 | uint16_t data_in=0x00; |
11 | |
12 | // kleine Pause
|
13 | P_Touch_Delay(UB_TOUCH_MESS_DELAY); |
14 | |
15 | // Chip-Select Lo
|
16 | P_Touch_CS(Bit_RESET); |
17 | P_Touch_Delay(UB_TOUCH_CLK_DELAY); |
18 | // einen Frame mit 24 Bit ausgeben
|
19 | for(n=0;n<24;n++) { |
20 | // Data vor der High-Flanke anlegen
|
21 | if((frame & maske_out)==0) { |
22 | P_Touch_DOUT(Bit_RESET); |
23 | }
|
24 | else { |
25 | P_Touch_DOUT(Bit_SET); |
26 | }
|
27 | // Clock-High Flanke
|
28 | P_Touch_CLK(Bit_SET); |
29 | // Daten nach der Hi-Flanke einlesen
|
30 | if((n>=9) && (n<=20)) { |
31 | if(P_Touch_DIN()!=Bit_RESET) { |
32 | data_in|=maske_in; |
33 | }
|
34 | // Maske weiterschalten
|
35 | maske_in = (maske_in>>1); |
36 | }
|
37 | P_Touch_Delay(UB_TOUCH_CLK_DELAY); |
38 | // Clock-Lo Flanke
|
39 | P_Touch_CLK(Bit_RESET); |
40 | P_Touch_Delay(UB_TOUCH_CLK_DELAY); |
41 | // Maske weiterschalten
|
42 | maske_out = (maske_out>>1); |
43 | }
|
44 | // Chip-Select Hi
|
45 | P_Touch_Delay(UB_TOUCH_CLK_DELAY); |
46 | P_Touch_CS(Bit_SET); |
47 | P_Touch_Delay(UB_TOUCH_CLK_DELAY); |
48 | |
49 | return(data_in); |
50 | }
|
Meine Umsetzung:
1 | //--------------------------------------------------------------
|
2 | // interne Funktion
|
3 | // Sendet einen 24bit Frame an den ADS7843
|
4 | // und empfangt einen 12Bit Datenwert
|
5 | //--------------------------------------------------------------
|
6 | uint16_t P_Touch_Frame(uint8_t frame) { |
7 | |
8 | //P_Touch_Delay(UB_TOUCH_MESS_DELAY);
|
9 | |
10 | uint16_t temp =0; |
11 | uint16_t data_in=touch_Get_Status(frame); |
12 | temp = (data_in>>4); |
13 | //temp = temp & 0x0FFF;
|
14 | char str1[20]; |
15 | uint16_to_hex(str1,temp); |
16 | //GLCD_Zeichenkette(3,1,str1);
|
17 | |
18 | |
19 | return temp; |
20 | }
|
21 | |
22 | |
23 | uint8_t touch_Write_Byte(uint8_t byte) |
24 | {
|
25 | |
26 | //P_Touch_Delay(UB_TOUCH_CLK_DELAY);
|
27 | /* nSS signal activation - low */
|
28 | GPIO_ResetBits(GPIOB, GPIO_Pin_13); |
29 | |
30 | /* SPI byte send */
|
31 | SPI_I2S_SendData(SPI2, byte); |
32 | /* Wait for SPIx Busy flag */
|
33 | while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_BSY) != RESET); |
34 | /* nSS signal deactivation - high */
|
35 | GPIO_SetBits(GPIOB, GPIO_Pin_13); |
36 | return (uint8_t)(SPI_I2S_ReceiveData(SPI2)); |
37 | }
|
38 | |
39 | |
40 | uint16_t touch_Get_Status(uint8_t byte) |
41 | {
|
42 | uint16_t temp = 0; |
43 | uint16_t rx = 0; |
44 | |
45 | |
46 | |
47 | touch_Write_Byte(byte); |
48 | P_Touch_Delay(UB_TOUCH_MESS_DELAY); |
49 | /* Send zero byte / receive MSByte */
|
50 | temp = touch_Write_Byte((uint8_t)(0x00)); |
51 | temp = temp << 8; |
52 | rx |= temp; |
53 | /* Send zero byte / receive LSByte */
|
54 | temp = touch_Write_Byte((uint8_t)(0x00)); |
55 | rx |= temp; |
56 | |
57 | |
58 | return rx; |
59 | }
|
Die Funktion zum auslesen habe ich unberührt belassen:
1 | //--------------------------------------------------------------
|
2 | // Kommandos an den Touch-Controller
|
3 | // Länge = 24Bit
|
4 | // MSB = CMD-Byte
|
5 | //--------------------------------------------------------------
|
6 | #define UB_TOUCH_CMD_CH3 0x90 // CH=X+, Mode=12bit, DiffEnded, PwrDown
|
7 | #define UB_TOUCH_CMD_CH4 0xD0 // CH=Y+, Mode=12bit, DiffEnded, PwrDown
|
8 | |
9 | |
10 | //--------------------------------------------------------------
|
11 | // interne Funktion
|
12 | // Einlesen der Roh-Touch-Daten
|
13 | //--------------------------------------------------------------
|
14 | void P_Touch_ReadRaw(void) |
15 | {
|
16 | uint16_t n,wert; |
17 | uint32_t xp=0,yp=0; |
18 | |
19 | // Mittelwert aus 4 Messungen bilden
|
20 | for(n=0;n<4;n++) { |
21 | // CH-4 (X) einlesen
|
22 | wert=P_Touch_Frame(UB_TOUCH_CMD_CH4); |
23 | xp+=wert; |
24 | // CH-3 (Y) einlesen
|
25 | wert=P_Touch_Frame(UB_TOUCH_CMD_CH3); |
26 | yp+=wert; |
27 | }
|
28 | Touch_Kal.raw.xp=(xp>>2); |
29 | Touch_Kal.raw.yp=(yp>>2); |
30 | }
|
Vielleicht sind auch 0x90 und 0xD0 für meine Anwendung / Anschluss falsch. Vielen Dank !
Eine Funktion habe ich noch vergessen:
1 | //--------------------------------------------------------------
|
2 | // Auslesen vom Touch und fuellen der Struktur "Touch_Data"
|
3 | // Touch_Data.status => [TOUCH_RELEASED, TOUCH_PRESSED]
|
4 | // Touch_Data.pos.xp => Xpos der Koordinate
|
5 | // Touch_Data.pos.yp => YPos der Koordinate
|
6 | //
|
7 | // -> Falls Touch nicht betaetigt,
|
8 | // sind die Koordinatenwerte nicht gueltig
|
9 | //--------------------------------------------------------------
|
10 | void UB_Touch_Read(void) |
11 | {
|
12 | // Pen einlesen
|
13 | if(P_Touch_PEN()==Bit_RESET) { |
14 | Touch_Data.status=TOUCH_PRESSED; |
15 | // Touch-Daten einlesen
|
16 | P_Touch_ReadRaw(); |
17 | // Touch-Daten in LCD-Koordinaten umrechnen
|
18 | P_Touch_CalcPos(); |
19 | }
|
20 | else { |
21 | Touch_Data.status=TOUCH_RELEASED; |
22 | // Touch Daten muessen nicht gelesen werden
|
23 | }
|
24 | }
|
Hallo, dein Problem ist, das du in "touch_Write_Byte" CS nach jedem Byte wieder auf High schaltest. CS muss aber für die Übertragung aller 24 Bits auf Low bleiben. Steuere das CS-Signal also besser in "P_Touch_Frame"! Sascha
Angehängte Dateien:
-

logic2.JPG
96 KB
{kind=link}
Okay.. Vielen Dank. Diesen Fehler habe ich vor 20 Minuten auch gefunden. Zusätzlich war auch noch der CS Pin Falsch -.- Die neue get_status sieht nun so aus:
1 | uint16_t touch_Get_Status(uint8_t byte) |
2 | {
|
3 | uint16_t temp = 0; |
4 | uint16_t rx = 0; |
5 | uint16_t temp2 =0; |
6 | |
7 | |
8 | GPIO_ResetBits(GPIOA, GPIO_Pin_11); |
9 | SPI_I2S_SendData(SPI2, byte); |
10 | while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_BSY) != RESET); |
11 | temp2 = (uint8_t)(SPI_I2S_ReceiveData(SPI2)); |
12 | |
13 | |
14 | |
15 | |
16 | |
17 | SPI_I2S_SendData(SPI2, 0x00); |
18 | while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_BSY) != RESET); |
19 | temp = (uint8_t)(SPI_I2S_ReceiveData(SPI2)); |
20 | |
21 | |
22 | |
23 | |
24 | temp = temp << 8; |
25 | rx |= temp; |
26 | |
27 | SPI_I2S_SendData(SPI2, 0x00); |
28 | while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_BSY) != RESET); |
29 | temp = (uint8_t)(SPI_I2S_ReceiveData(SPI2)); |
30 | |
31 | char str1[20]; |
32 | uint16_to_hex(str1,temp); |
33 | GLCD_Zeichenkette(3,1,str1); |
34 | |
35 | |
36 | rx |= temp; |
37 | |
38 | |
39 | GPIO_SetBits(GPIOA, GPIO_Pin_11); |
40 | |
41 | |
42 | |
43 | return rx; |
44 | }
|
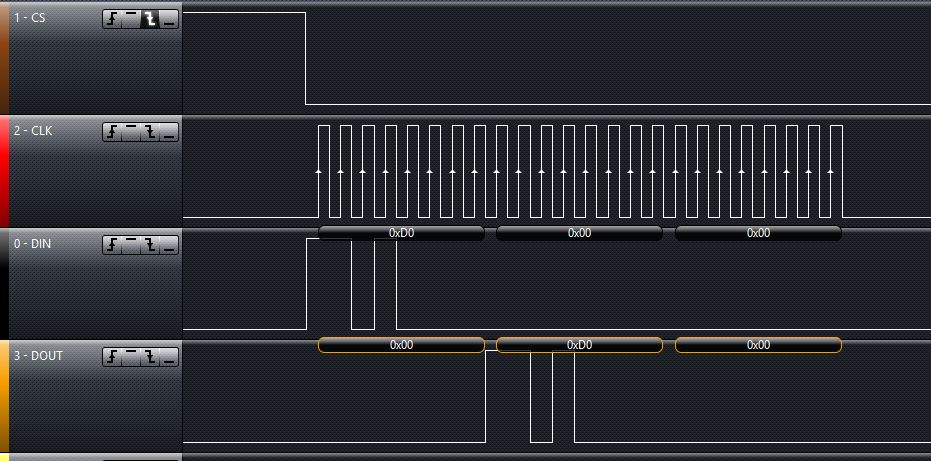
mit dem Logic komme ich auc folgende "Bilder": "Anhang" Interessant wären vielleicht auch noch die korrekten Einstellung für die Hardware SPI: Unsicher bin ich bei den folgenden Optionen: SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64; SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; SPI_InitStructure.SPI_CRCPolynomial = 7;
Okay.. CS in Touchframe behandeln habe ich "nun" auch.
1 | uint16_t P_Touch_Frame(uint8_t frame) { |
2 | |
3 | //P_Touch_Delay(UB_TOUCH_MESS_DELAY);
|
4 | GPIO_ResetBits(GPIOA, GPIO_Pin_11); |
5 | uint16_t temp =0; |
6 | uint16_t data_in=touch_Get_Status(frame); |
7 | temp = (data_in>>4); |
8 | //temp = temp & 0x0FFF;
|
9 | |
10 | GPIO_SetBits(GPIOA, GPIO_Pin_11); |
11 | |
12 | return temp; |
13 | }
|
In get_data entsprechend entfernt. Der ADS gibt mir scheinbar nur ein "ECHO" zurück.. ich sende ihm ein D0 und an DOUT gibt er ein D0 zurück. selbiges bei 00 und 90. Bin ich eventuell zu "schnell" ?
Okay.. nun läuft es -.- Das Problem war "scheinbar" dass der CS pin von dem Schrittmotortreiber am gleichen SPI nicht HIGH war zum Zeitpunkt der Touch Abfrage. Sehr blöder Fehler.. ich hätte wetten können das überprüft zu haben. Dennoch waren die Funktionen zu Beginn natürlich falsch ! Vielen Dank !
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.