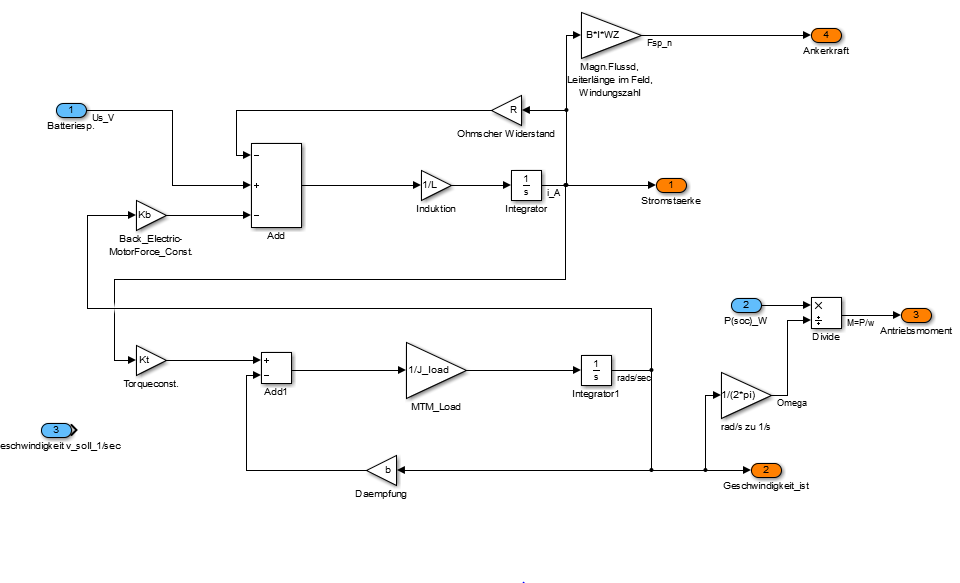
Hallo. Meine Aufgabe ist es einen Elektroroller zu simulieren via Matlab Simulink und ich scheitere gerade am Gleichstrommotor. (siehe Anhang: Subsystem DC_Motor) Meine Eingangsgrößen sind Batteriespannung Us, Batterieladezustand soc, Motorleistung P, und ohmscher Widerstand R sowie Induktion L. Diese Werte werden im Parametersatz festgelegt. Der DC_Motor ist ein Teil meiner Regelstrecke. Die Eingangsgröße ist eine Geschwindigkeit km/h, die ich in 1/s umrechne. Frequenz Reifen = Frequenz Motor. Es soll rauskommen: die Istgeschwindigkeit in 1/sec oder rad/sec und der Verbauch in kWh. Meine Motorleistung ist abhängig vom ladezustand der Batterie: P(soc) = Pnenn * soc (zB Batterie zu 60% geladen: Pnenn * 0.6) Leider stehe ich dann schon auf dem Schlauch, da mir das Grundverständnis elektrischer Antriebe fehlt. Wie hängen Leistung P, R, L zusammen? Macht es Sinn alle drei Parameter festzulegen oder ist P eine Funktion von R und L? Wie komme ich auf die Istgeschwindigkeit? Zusätzlich habe ich eine Polpaarzahl festgelegt im Parametersatz. Wie bringe ich diese mit ein? Freue mich auch über Buchempfehlungen oder Internetseiten. Skript vom Prof nützt mir hier wenig. Vielen Dank für die Hilfe! Grüße, Sebastian
Angehängte Dateien:
-

DCMOTOR2.PNG
35 KB
Du hast doch da das Simulink-Modell, das scheint mir auf den ersten Blick korrekt die Wirkungszusammenhänge abzubilden. Ich verstehe deshalb nicht so ganz die Fragen, die Du im Anschluss aufwirfst?
Wobei das Antriebsmoment nicht irgendwie P/irgendwas ist, sondern doch genau hinter dem Proportionalglied Kf anliegt. Kf ist der Zusammenhang zwischen Strom und Rotormoment. Dahinter liegen Rotorträgheit und Last.
Oke. Ich glaube mein Problem ist etwas grundlegender. Wenn ich Roller fahre, regel ich die Geschwindigkeit (umgerechnet zu omega_reifen = omega_dcmotor) mit meiner Hand. Sagen wir ich geben mehr 'Gas' bei einem Roller mit Elektromotor. Was erhöht sich? Die Spannung? Wenn ich einen Regler einbaue vor meinem Elektromotor (Regelstrecke), wäre meine Regelabweichung eine Drehzahldifferenz zwischen Soll-, und Ist-Wert. Diese geht in den Regler, wird verrechnet und wird anschließend via AD-wandler in eine Spannung umgewandelt, welche in meine Regelstrecke (Gleichstrommotor) geht und bewirkt, dass die Drehzahl erhöht oder gesenkt wird. Das ist aber nicht meine Batteriespannung! Wie hängen die beiden Spannungen zusammen? Ist die Batteriespannung meine Versorgungsspannung? Vielen Dank für die Mühe, Sebastian
Gleichstromsteller!!! Dir fehlt der Gleichstromsteller... Deine Batteriespannung ist die maximale Spannung die der Motor bekommen kann. Also wenn der Gasgriff voll aufgerissen ist. Du musst also eine niedrigere Spannung an den Motor geben in abhängigkeit vom Gasgriff. Das wird im realen über einen Gleichstromsteller gemacht. Bei dem du über den Tastgrad die Spannung einstellst. Der Tastgrad ist dabei vom Gasgriff abhängig. Möchtest du die Drehzahl oder das Drehmoment regeln?
Danke, die Drehzahl soll geregelt werden, das Drehmoment soll lediglich angezeigt werden.
Was für dich eventuell interessant ist : Plecs (baut auf Matlab Simulink auf) gibts als Testversion oder für Studenten auch Vollversion für jeweils erneuerbar 1 Jahr musst die nur anschreiben. http://www.plexim.com/de/plecs
Naja, die Wirkungsweise ist doch klar... Spannung füht zu Strom, Strom führt zu Drehmoment, Drehmoment zu Drehung, Drehung führt zu BEMF, BEMF sorgt für Absenkung der anliegenden Spannung. Du kannst also direkt über die Spannung regeln (nichts anderes würde ja auch ein Stromregler machen), im allgemeinen ist aber das elektrische Vehalten des Motors so gut bekannt, bezogen auf die Mechanik blitzschnell und konstant, dass man hier einen angepassten Stromregler verwendet und folglich außenrum Regelkreis(e) baut die sich nur noch um die mechanischen Belange (also das Drehmoment und Trägheiten und Lasten) kümmern. Den elektrischen Anteil kann man dann auch ziemlich gut als PT1-Glied annähern. Für einen Auto- und Motorradfahrer wäre wahrscheinlich eine echte Drehzahlregelung ziemlich ungewohnt. Der ist eigentlich gewohnt, das Drehmoment einzustellen und selbst als Geschwindigkeitsregler zu fungieren.
Danke! Das hat schonmal Klarheit gebracht. Die nächste Frage wäre ob es in Simulink fertige Blöcke gibt für Gleichstromrichter und A/D-Wandler oder auf welche Weise integriere ich diese am besten?
Wie sehr sollst Du denn da eigentlich ins Detail gehen? Sollst Du da jetzt auch noch einen gepulsten Stromregler mit H-Brücke durchsimulieren? Ich fänd' da nen PT1-Glied (einfach Übertragungsfunktion angeben) irgendwie zweckdienlicher. Für Abtastung und Quantisierung gibt's natürlich fertige Blöcke...
Vielleicht habe ich es doch ncoh nicht ganz verstanden... Die Übertragungsfunktion ist meine Streckengleichung des Gleichstrommotors, also die DGL, nach der ich meinen Motor aufgebaut habe? Als Eingang in meine Gleichstrommotorstrecke habe ich die vom Gleichstromrichter abgegebene Spannung. Je nachdem wieviel 'Gas' ich gebe bekomme ich die zugehörige Spannung. Die obergrenze ist dabei meine Batteriespannung. Regelabweichung e ist eine Drehzahl. Mit dieser kann mein Gleichstromrichter aber nicht arbeiten, deshalb A/D-Wandler zu Spannung. Korrekt?
Nee, die Übertragungsfunktion, die ich andachte, würde jetzt nur die Verzögerung des Stromregelalgorithmus + die Übertragungseigenschaften des der L-R-Strecke beinhalten. Damit wäre alles elektrische schonmal auf ein PT1-Glied heruntergekürzt. Was ich nicht nachvollziehen kann ist, warum Du einen A/D-Wandler brauchst, um vom Drehzahlfehler auf einen Sollstrom zu kommen. Ich würde da jetzt einfach einen PI-Regler hernehmen, den kann man auch "analog" durchsimulieren, wiederum mit seiner Übertragungsfunktion. Aber ich bin hier nur am Raten, weil ich Deine Aufgabenstellung noch nicht so ganz durchblickt habe... Und das ist alles so kompliziert eigentlich gar nicht, vor allem wenn man das Motormodell stark idealisieren darf. Elektroroller simulieren könnte jetzt auch bedeuten, dass Du eine Masse m hast, eine Vortriebskraft und einen doppelintegrator, verstehst Du? Es kommt auf die genaue Aufgabenstellung an, damit man beurteilen kann, was simuliert werden soll und was einfach idealisiert werden kann usw. Ich würde jetzt vermuten, dass die Aufgabenstellung besagt: PI(D) oder soetwas für Stromregelung, elektrisches Ersatzmodell für den Motor (LR-Strecke + U_BEMF), drumherum PI für Drehzahlregelung. Welcher Prof eigentlich, Anfangsbuchstabe sollte genügen, irgendwie kommt mir sowas bekannt vor ;)
Ich mache das ganze freiwillig, als Hiwi. Regelungstechnik1 gerade bestanden und jetzt merke ich, dass ich nichts verstanden habe... :) Ich bin gerade dabei eine Modellgleichung aufzustellen, die ich anschließend mal posten werden. Mein grober Schnitzer war, ich hatte Spannung irgendwie verbunden mit einem digitalen Signal, was Blödsinn ist (sry). Also kein A/D-Wandler, allerdings muss ich meine Drehzahlabweichung in eine Spannung transformieren, die in die DCMotor-Strecke eingeht oder nicht?
Ja, oder Du machst es für den Ingenör wie mich naheliegender und wandelst Drehzahlabweichung in Beschleunigungsmoment um, nimmst das mal 1/Kf -> ergibt Sollstrom und machst dahinter einen Regler der über die Spannung den Strom regelt. Wenn der fix ist, könnte er eigentlich auch einen D-Anteil verwenden, um die Induktivität zur Mitarbeit zu überreden... Oder man steuert das vor, aber das Modell ist ja ziemlich temperaturabhängig...
so schwer ist es nicht einen motor modell aufzustellen. einfach als pt1 glied kann man es aproximieren. die konstanten kann man sehr einfach durch experimente finden. K T vielleicht totzeitbehaftet sein. ich hoffe es hilft dir
Angehängte Dateien:
-

DC3.PNG
36 KB -

Erstes_Signal_fail.PNG
2,8 KB -

Fail_ohneRegler.PNG
2,4 KB
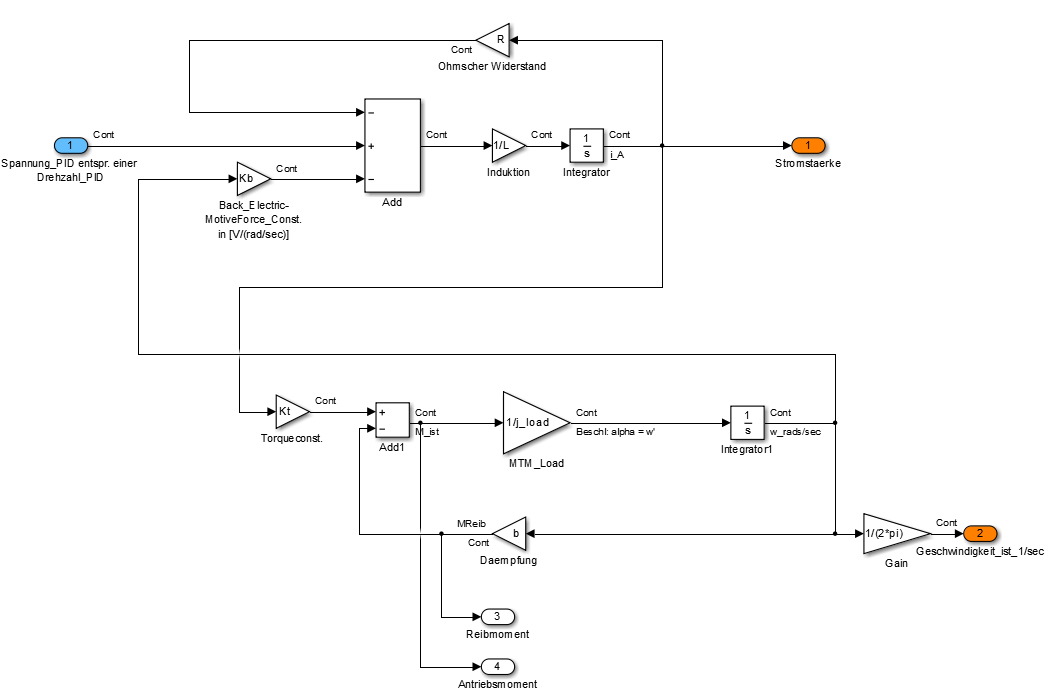
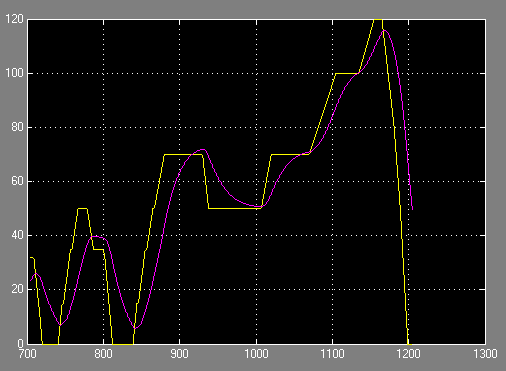
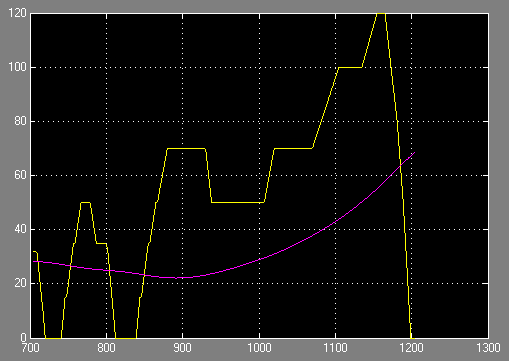
Hey, ich habe hier mal mein erstes Ergebnis, was allerdings noch sehr zu wünschen übrig lässt, was auch an nicht optimaler Parametrierung liegt. Wäre nett wenn Ihr mir sagen könntet, ob mein System so erstmal grundlegend oke ist. Omega_soll in 1/s --> Regelabweichung_1/s --> PID-Regler --> Regelstrecke --> Omega_ist 1/s --> Rückführung Anbei meine Gleichstrommotorregelstrecke, sowie das Signal (Soll/Ist - Geschwindigkeit) mit Regler (PID-Tune) und einmal ohne Regler. X-Achse: Strecke in m Y-Achse: Geschw. km/h An welchen Parametern müsste ich "drehen" damit mein Motor zB nicht so träge reagiert? Bin für Fehlerhinweise, Optimierungen und alles dankbar. Wiedermal Danke! MfG, Sebo Ps: eine Kreisfrequenz-Regelabweichung geht in meinen Regler. Mein Motor arbeitet mit Spannungen als Eingangssignal. Heißt Kp muss die Einheit V/(1/s) haben, richtig?
Das Modell sieht gut aus. Kp möglichst groß, Tn möglichst klein (Tn also der Integrator arbeitet gegen die stationäre Abweichung verursacht durch die geschwindigkeitsabhängige Reibung und die BEMF). ;) Schau Dir mal die Einstellregeln nach Ziegler & Nichols an, die werden in der Lehre gerne verwendet, da hast Du dann etwas handfestes, was Du hinschreiben kannst. Einheit für den Regelfaktor sieht gut aus.
Angehängte Dateien:
-

v_soll_ist_kmh.PNG
2,5 KB -

stromstaerke_i_A.PNG
1,1 KB -

DC_simulink.PNG
16 KB
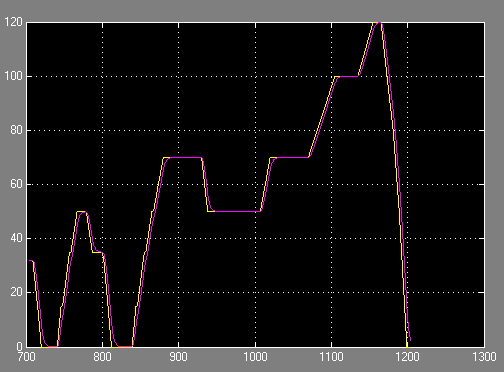
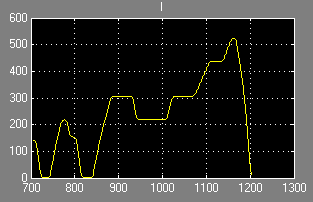
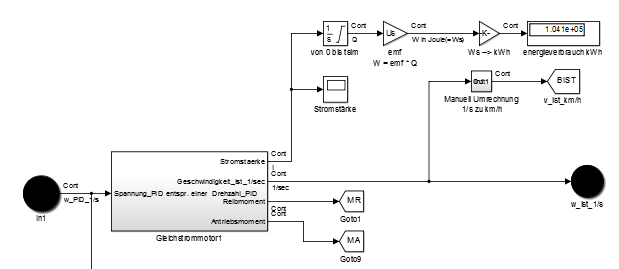
Danke, habe erstmal eine akzeptable Annäherung erhalten, allerdings tut sich schon weiteres auf... Meine Stromstärke ist proportional zur Drehzahl, siehe Anhang. Integriere ich den Strom über die Simulationszeit bekomme ich die Ladung welche in dieser Zeit verschoben wurde. I = dQ/dt Integral I dt = Q (Fläche unter Stromsignal) Q * ElectromotiveForce ergibt die Arbeit bzw. Energie, die mein Motor verrichtet oder "verbraucht" hat in J bzw. Ws. Umgerechnet zu kWh (/1000 und *60²)ergibt das bei mir ca 104.000 kWh ... Etwas viel... Wo ich meine Stromstärke entnehme ist in DC3.png, ein Beitrag zuvor, zu sehen. Schon die Werte für den Strom scheinen mir viel zu hoch. und wiedermal Danke! MfG, Sebo
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.