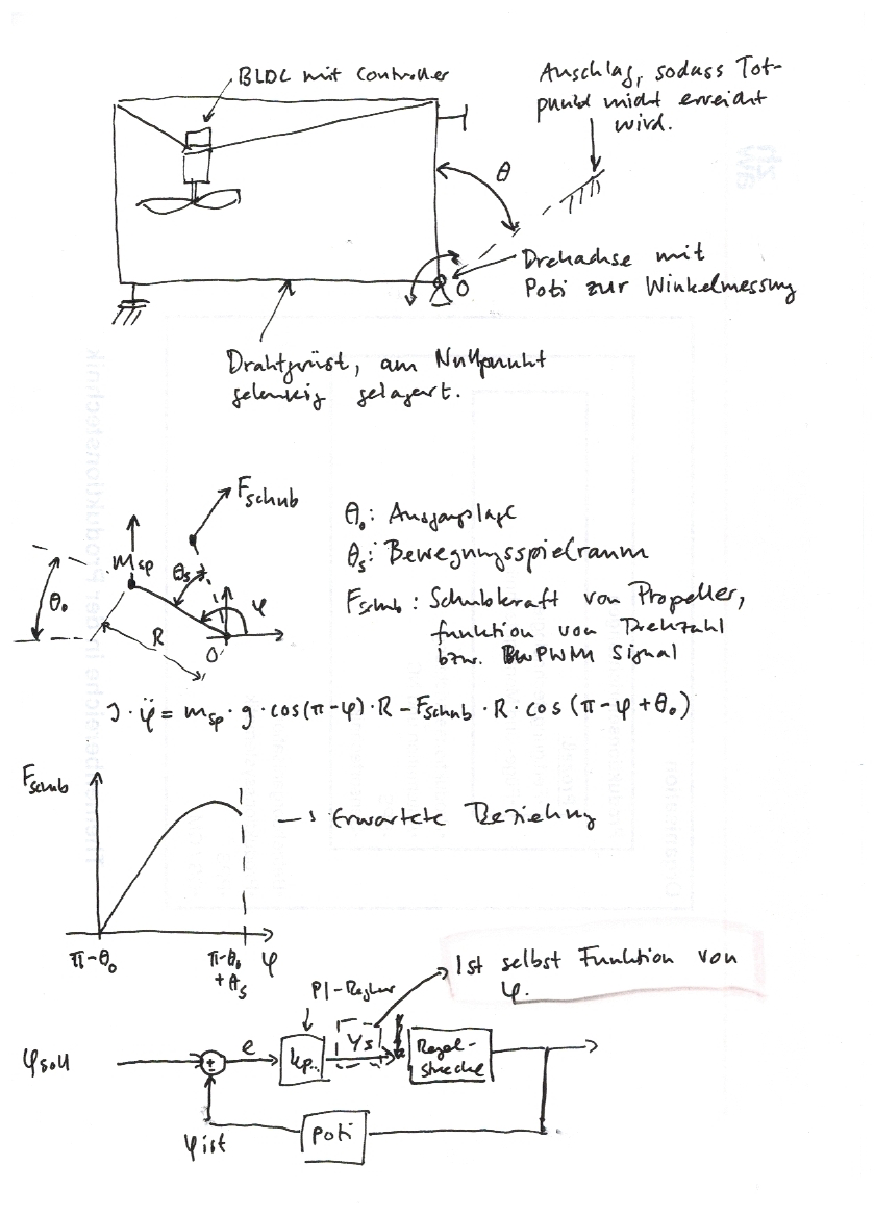
Hallo Leute Mit einem ATmega8 möchte ich den Winkel eines Hebelarmes der durch einen Propeller angehoben wird regeln (siehe Skizze). Was mir etwas Kopfzerbrechen bereitet ist, dass für jeden konstant gehaltenen Hebelwinkel eine andere Kraft notwendig ist. Ich kann mir gut vorstellen, dass der Regler bei diesem System nicht schnell genug reagieren kann. Nun zu meiner (vielleicht etwas komischen) Frage. Wäre es sinnvoll das Stellsignal nicht nur durch den PID-Regler, sondern auch durch eine Funktion des aktuellen Winkels zu beeinflussen? Gerne erwarte ich auch kritische Kommentare :) Vielen Dank für Antworten und Gruess, Samuel
Angehängte Dateien:
-

Projekt-001.png
380 KB
>Ich kann mir gut vorstellen, dass der Regler bei diesem System nicht >schnell genug reagieren kann. Was außer Deiner Phantasie läßt Dich dies annehmen? >Nun zu meiner (vielleicht etwas komischen) Frage. Wäre es sinnvoll das >Stellsignal nicht nur durch den PID-Regler, sondern auch durch eine >Funktion des aktuellen Winkels zu beeinflussen? Hast Du Dich schon mit Reglern beschäftigt? Was denkst Du macht ein P-Anteil in der Regelung?
Der I Anteil sorgt für eine Abweichung 0. Ein I-Anteil macht die Regelung jedoch auch nur halb so schnell. Deshalb wird für solche Systeme wie Deines oder zum Beispiel auch inverses Pendel gerne ein PD Regler, also I=0 verwendet. Um bei konstanter Störgröße (Gewicht) auf eine gute Positionsgenauigkeit zu kommen, kann es sinnvoll sein, beim PD Regler auf den Sollwert noch einen Konstanten Wert zu addieren.
Hallo, Der P-Anteil verstärkt die Regelabweichung mit einem konstanten Faktor. Kenne die Grundlagen der Regelungstechnik welche aber etwas eingerostet sind. Meine Bedenken sind bei dem System dass bei Winkeln nahe am Endanschlag weniger Leistung gebraucht wird als bei kleineren Winkeln. Sind diese Bedenken nicht angebracht?
> > Nun zu meiner (vielleicht etwas komischen) Frage. Wäre es sinnvoll das > Stellsignal nicht nur durch den PID-Regler, sondern auch durch eine > Funktion des aktuellen Winkels zu beeinflussen? Du würdest durch Probieren so eine Zuordnung sicherlich herausfinden können. Die Wertetabelle könntest Du dann entsprechend programmieren: Winkel Motorleistung 0° 20% 30° 40% 50° 70% 65° 50% Wenn keine unerwartete Störung auftritt, würde die Anordnung den gewünschten Winkel halten. Was aber nicht funktionieren kann ist, dass Du einen Sollwertänderung ausgehend von 0° über den Punkt mit der maximalen Motorleistung, in dem Beispiel 50°, durchführst. Also braucht es doch einen Regler. Ich könnte mir vorstellen, dass man das mit einem PID-Regler in den Griff bekommen kann. Da braucht man unbedingt auch einen I-Anteil, weil sonst die stationäre Genauigkeit nicht gewährleistet ist. Ein interessantes Projekt. Halte uns auf dem Laufenden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.