Hallo Freunde Ich möchte im Rahmen eines privaten Projektes Design durch Modellierung als Methode verwenden ein geplantes System zur Schotsteuerung in einem Modellsegelboot zu Modellieren, zu Simulieren und dann die energieeffizienteste Lösung finden. Da Matlab und Simulink, bzw. Maple und MapleSim zwar geeigneter, aber für den Privatmann unbezahlbar, will ich meine Lösung finden durch den Einsatz der Wolfram Software Mathematica und SystemModeler. Nur zur Ergänzung der Hintergrundsinformatikn. Es geht bei meiner Frage nicht darum die Mathematikfunktionen von Mathematica, noch um die Modellierung innerhalb von SystemModeler auf der Basis vorhandener "Modelica" Modelle, sondern darum zu externer Hardware, hier z. B. LPCXpresso1769 unter anderem solche Verbindung herzustellen, wie man es für "Hardware-in-the-Loop", bzw. "Software-in-the-Loop" benötigt, für solche Hardware die nicht in der Liste der unterstützten Hardware von Wolfram ist. Noch ein Hinweis warum ich mich neben den Kosten für Mathematica entschieden habe. SystemModeler egalisiert oder versucht zu egalisieren ihr hinter den oben genannten Wettbewerbsanbietern die umfangreiche Objekt-Bibliotheken haben, in dem Sie stark auf die Einbindung der bei "OpenModelica.org" kostenlos verfügbaren IDE für Modelica und den dort verfügbaren Objekten zu setzen. Für mich bedeutet dieses, dass ich Objekte meines Systems in Modelica und ihrer IDE Modellieren kann! Natürlich plane ich Erfahrungen zu sammeln, in dem ich Raspberry Pi B+, z. B. auch mit gebundleter Mathematica Software einsetze. Aber trotz wiederholter Nachfrage bei Wolfram in UK und extensiver Recherche im Internet, habe ich kein Beispiel gefunden wie z. B. eine "Hello World" Implementation wo man eine LED blinken ließe! Natürlich findet man solches für RaspBerry Pi und vermutlich auch für Arduino. Ich würde aus einer solchen "Applikationsnote" entnehmen können wie Wolfram sich das vorstellt es zu realisieren. So müsste ich mich durch Unmengen an Links und Dokumentation durcharbeiten und selber mir hoffentlich etwas bauen, was der "Richtung" von Wolfram entspricht. Wolfram scheint zur Zeit ausschließlich die Richtung zu verfolgen Mathematica und ihre Wolfram Sprache auf externe Hardware zu portieren. Meine Frage also, wo finde ich eine Referenz-Lösung wie man noch nicht von Wolfram unterstützte externe Hardware anspricht und einbindet? Ich freue mich eigentlich schon darauf das zu realisieren und dann die Modellierung mit der echten Hardware vergleichen zu können!
Es ist in das Thema ein wenig bewegung gekommen. meine Frage war ja welche methodik favourisiert Wolfram um externe, nicht speziell unterstützte „Devices” für „Hardware-in-the-Loop” einzubinden. Jetzt habe ich zur neuen Version des „SystemModeler” eine aber eigentlich sehr suboptimale Weise gefunden, welche für Arduino existieren soll! Wolfram behauptet jede externe Hardware einbinden zu können, welche das Protokoll „Firmdata” unterstützt und spricht dabei über eine eigene dabei beteiligte Software „ModelPlug”. Geht man auf die Homepage von Firmdata lernt man, dass es dieses Protokoll in unterschiedlichen Versionen gibt, welche Wolfram hier verlangt habe ich aber nicht gefunden. Weiterhin erfolgt der Datenaustausch nur in Intervalen von minimal 10ms, länger falls mehr Daten übertragen werden, was auch auf die serielle Verbindung und der von MIDI abgeleiteten Parameter resultiert. Sinnvoll wäre es WIFI oder Internet als Medium der Kommunikation zu verwenden und ein mächtigeres Datenformat. es resultiert aus dem verwendeten Datenformat, dass nur eine begrenzte Anzahl von PWMs z. B. unterstützt werden. Ein Beitrag einer Person aus China, der auf eine Frage vom Anfang 2014 nie geantwortet hat, der eine Portierung auf einen kleinen LPC800 gemacht hat, kann man lernen, das er, um diese Portierung von der Arduino Umgebung auf die ARM Cortex M Umgebung, sowohl auf der PC-Seite, wie auch in der Software auf der ARM Seite patches machen musste! halte euch weiter informiert!
Angehängte Dateien:
-

Schotsteuerung_blockdiagramm.jpg
100 KB -

Schote_und_Baeume.jpg
30 KB
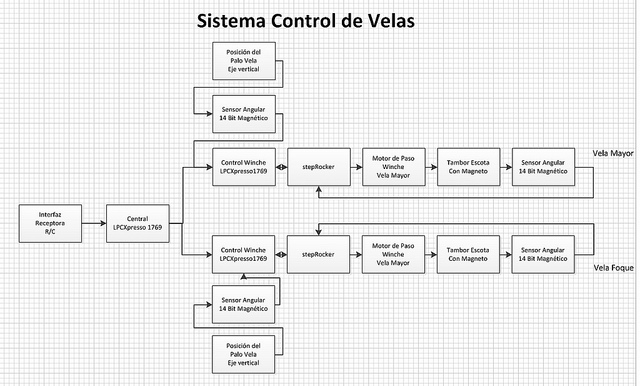
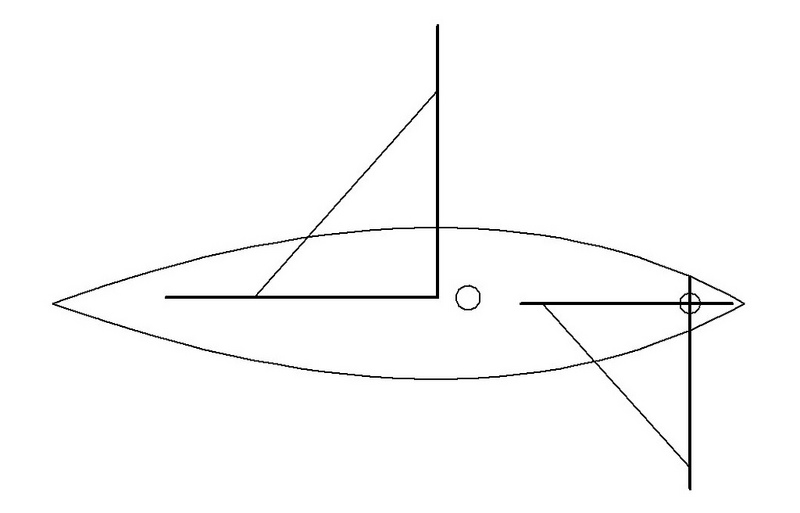
Offensichtlich ist das Thema Design durch Modellierung kaum jemand ein Begriff, jedoch ein möglicher weg effizienter die immer komplexer werdenden eingebetteten System zu entwickeln, besonders wenn dabei unterschiedliche Domains, so nennt man die diversen Techniken die in einem System zum tragen kommen können. Als Schiffsmodellbauer habe ich seit einiger Zeit angefangen mir ein eigenes System der Schotsteuerung zu konzipieren, welches eine Verstelllänge von 8400 mm in einem Rumpf von nur 1650 mm Länge ermöglicht. Das im Anhang als erstes zu findende Bild zeigt ein Blockdiagramm des Systems, wie ich es für einen Freund aus Spanien, der mal überlegt hatte mitzumachen, nach mehreren Iterationen gezeichnet habe. da es für das weitere Verständnis der Beiträge in diesem Thread von Bedeutung ist, möchte ich das Umfeld und die Zielsetzungen des System vorstellen und dann zeigen, wodurch ich herausgefordert mich entschlossen habe die Methode des Design durch Modellierung zu erlernen und einzusetzen. Das System zur Schotsteuerung dient dazu einen Skipper am Ufer eines Gewässers mit einer R/C Fernsteuerung die Segelstellung kontrollieren zu können und so das Segelboot zu steuern. Somit ist der Block ganz links der R/C-Empfänger, hier meine robbe F14 Navy, die mit 8 Steckern für bis zu 8 Kanäle jeweils das PWM Signal liefert, welches durch die Länge der Zeit, 1 ms bis 2 ms, die das Signal logisch „1” einnimmt die Position des Steuerelementes am Sender ins Modell liefert. Der 2. Block im Diagramm von links ist eine LPCXpresso1769 Karte die ich als Zentrale im Modell einsetze. 8 der Pins, ich habe noch nicht entschieden welche Pins der Ports "0" oder "2" ich dafür einsetzen werde werden mit den PWMs gefüttert und zusammen mit einem Counter die PWMs der Kanäle des Empfängers digitalisieren. Das Blockdiagramm besteht dann rechts von der zentrale aus 2 identischen Zweigen, da das Schotsteuerungssystem 2 Segel zu kontrollieren erlaubt, Haupt- und Vorsegel, welche beide einen um eine Welle drehenden Bäume haben. Ich werde im Weiteren mich bei der Beschreibung nur dem oberen Zweig widmen, der untere ist identisch. Ändert sich der Wert der vom Sender kommt und den Befehl des Skippers am Sender wiedergibt, dann und nur dann wird über I2C der neue Wert an die nächsten LPCXpresso1769 Karte weitergeben. Ich werde diese LPCXpresso 1769 Karte im Weiteren „Steuerung Hauptsegel nennen. Die zentrale wird dabei sicherstellen nur wirkliche Änderungen an die Steuerung Hauptsegel weiter zu geben. Dieser Wert wird in der Variablen Maximalwinkel genannt abgelegt und gepflegt. Der Wert heißt Maximalwinkel, weil er die maximale zulässige Öffnung, hier des Hauptsegels, bestimmt, welcher der Skipper durch die Stellung des Steuerknüppels am Sender bestimmt. Dieser Winkel zwischen der Mittelachse des Rumpfes und dem Baum, in der einfachen Zeichnung im Anhang "Schote_und_Baeume" wird es gezeigt. Um die Kommunikation zwischen der Zentrale und anderen Steuereinheiten im Modell auf ein Minimum zu beschränken, gibt die Zentrale nur dann Werte weiter, wenn sich wirklich was geändert hat. Die Fernsteuerung schickt ja alle 20 ms Werte für die 8 Kanäle und die werden durch die Übertragung und Digitalisierung Schwankungen aufweisen, welche die Zentrale abfängt. da das ganze Modell Akkus zur Versorgung verwendet habe ich das Ziel eine möglichst Energieeffiziente Implementierung zu erreichen. Auch hier wird die Design-Methode ihre Stärken ausspielen können. Die LPCXpresso1769-Karte Steuerung Hauptsegel hat also mit der Variablen Maximalwinkel die Betriebsvorgabe vom Skipper! Der Grund warum ich ein eigenes System zur Schotsteuerung einsetzen werde ist, dass durch die Implementierung der Schotführung des Originals, hier der Segler Endeavour, ist das die Schot 6x vom Deck zum Baum und zurück geht, weshalb die enorme Schotlängenänderung von 8400 mm erforderlich ist! Hier habe ich leider kein eigenes Bild und kann daher nur auf die Endeavour im Internet verweisen. Mehrere Forenmitglieder aus dem Bereich des Schiffsmodellbaus haben mit unterschiedlichen Begründungen die von mir verfolgte Schotführung für im Modell nicht funktionsfähig bezeichnet und die unterschiedlichsten Argumente dafür genannt. Tatsache ist, das keines der auf dem Markt angebotenen oder in Foren vorgestellten Schotsysteme die hier gestellte Aufgabe erledigen können, das auch noch zuverlässig wie ich es von meiner Lösung verlange! Hier liegt noch ein Grund warum ich die Methode des "Designs durch Modellierung" anwenden werde. Diese Technik, für welche ich die Kombination der Software-Werkzeuge Mathematica und SystemModeler von Wolfram zum Einsatz bringe und welche für die Erstellung der Komponenten der Simulation die Modellierungssprache Modelica verwendet, für welche SystemModeler ein Werkzeug ist, welches ein solches auf Modelica basierendes Modell simulieren kann! Modelica erlaubt es die unterschiedlichsten Domains zu kombinieren, so kommt bei mir soweit bisher beschrieben die Mechanik zum Einsatz, welche sowohl den Einfluss der Natur, hier Wind und Dünung z. B., welche sowohl den Winddruck auf das Segel, wodurch eine Zuglast auf die schot wirkt und diese ein Lastdrehmoment auf den Schrittmotor, welcher die Schottrommel dreht. Aber auch die Reibung der Schot spielt, zumindest bei den Einwänden eine große Rolle. Hier ein paar Beispiele: Die Schot, welche 6x zwischen dem Deck und dem Baum des Segels verläuft geht durch Blöcke. Blöcke enthalten eine Rolle um welche die Schot läuft und so umgelenkt wird! Hier spielt die Reibung in den unterschiedlichen Betriebsbedingungen eine entscheidende Rolle. Durchmesser der Rolle im Block, Winkel um welchen die Schot sich um die Rolle windet, Durchmesser und Material der Schot und der Rolle, ob die schot nass oder trocken ist. was passiert wenn die Schot ganz plötzlich durch das Segel in einem Ruck durch den Block läuft, oder der Schrittmotor plötzlich mit einer bestimmten zeitvariablen Beschleunigung an der Schot zieht? Für alles dieses habe ich begonnen, obwohl ich vor fast 40 Jahren in der Schule Physik-Leistungskurs hatte, habe ich begonnen im Internet Vorlesungen als Video, begleitet durch Skripte, Video von Übungsveranstaltungen und hervorragende Physik-Lehrbücher besorgt, welche die theoretische und die experimentelle Physik-Vorlesungen behandeln, welche zu dem Physik-Bachelor führen. Schon hier konnte ich auch feststellen, dass in den fast 40 Jahren meine Mathematik-Kenntnisse vom Abitur und dem Maschinenbaustudium eingerostet und erodiert sind! So habe ich begonnen von der MIT in Boston, die im Rahmen der "OpenCourseware" kostenlos im Internet Videos, schriftliches Material, inklusive Lehrbücher der echten Vorlesungen der Mathematik, der Physik, der Elektronik anbietet und dazu auch die Möglichkeit sowohl als Video Übungsveranstaltungen miterleben zu können und imInternet Studiengruppen zu bilden! So pauke ich gerade Calculus-Vorlesungen, 18.01SC und 18.02SC, die mein Wissen so auf die solide Platform bringen weiter die Vorlesungen die im Rahmen des Bachelors der Mathematik angeboten werden. Auch deutsche Unis bieten excellente Studiermöglichkeiten so kostenlos und unverbindlich im Internet an! Schnell stellt man fest, dass ohne eine solide Auffrischung der mathematischen Kenntnisse und Fertigkeiten wie ein mathematischer Analphabet oder Legastheniker bei praktisch allen Kursen liegt. Nach fast einem Jahr, trotz großer gesundheitlicher Probleme die meine Konzentrationsfähigkeit begrenzen, bin ich nun immerhin in der Lage parallel an der Modellierung meines Schotsystems mit Mathematica, SystemModeler und Modelica anzugehn. Ich denke die Modellierung der Schot um eine Rolle wird ein interessantes, für mein Projekt wichtiges Teilprojekt werden. Aber neben den mechanischen Einflüssen aus der Natur auf mein System und dem Verhalten der Komponenten, sind auch elektrostatische Effekte von Bedeutung. Da die eletrostatische Aufladung der Schot durch die Reibung in den Führungsschläuchen, meist aus Kunststoff haben einen Effekt der der rein mechanischen Reibung entspricht, wenn nicht sogar übertrifft. Auch hier wurden einige Einwände präsentiert! Es geht jedoch weiter! Ich möchte, um zu dokumentieren, dass es hier wirklich im Elektronik und Mikrocontroller geht, nochmals darauf hinweisen, dass die Regelungstechnik hier entscheidend ist, dass aber dafür der Einfluss des Umfeldes voll verstanden werden muss und das in einem solchen eingebetteten System eben Mechanik, Elektronik, Thermodynamik, Elektrostitik zusammen das System bilden. Da die Vielzahl der Einflussgrößen, die Wahl der Parametrisierungswerte letzlich alle zusammen das Ziel beeinflussen eine möglichst einergieeffiziente Lösung zu entwickeln!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.