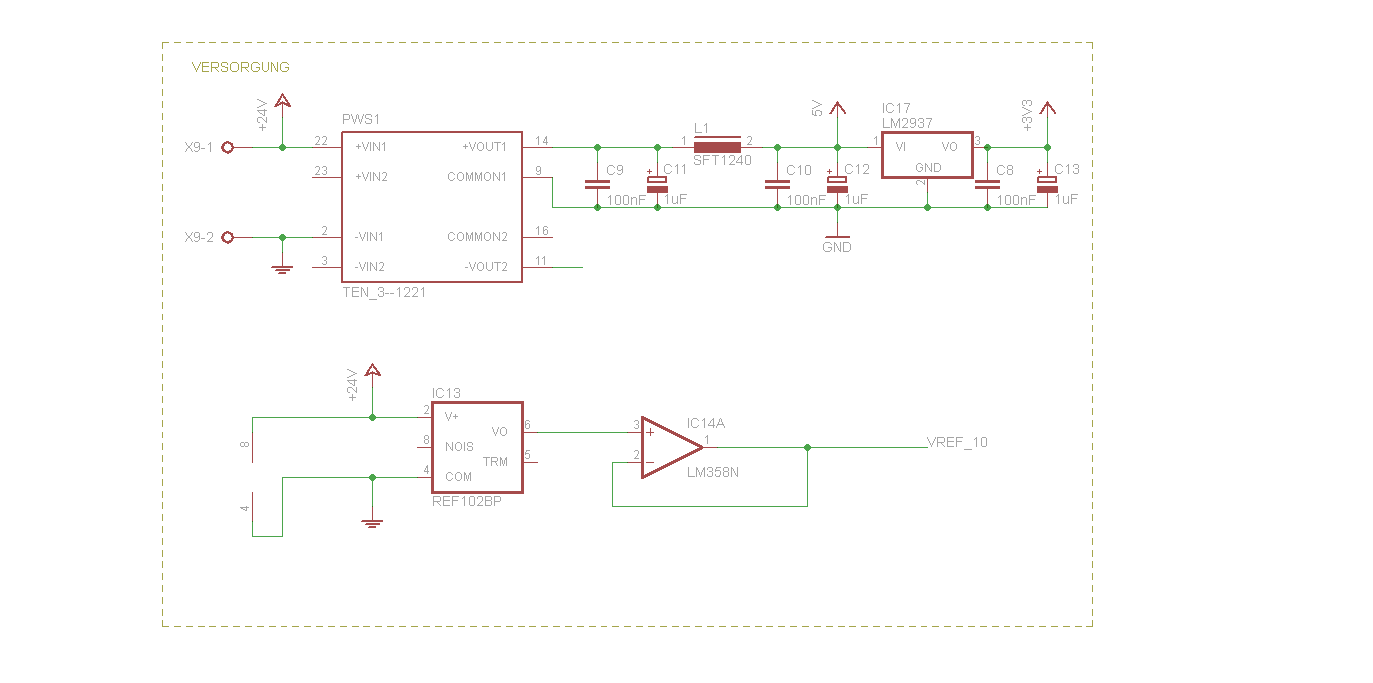
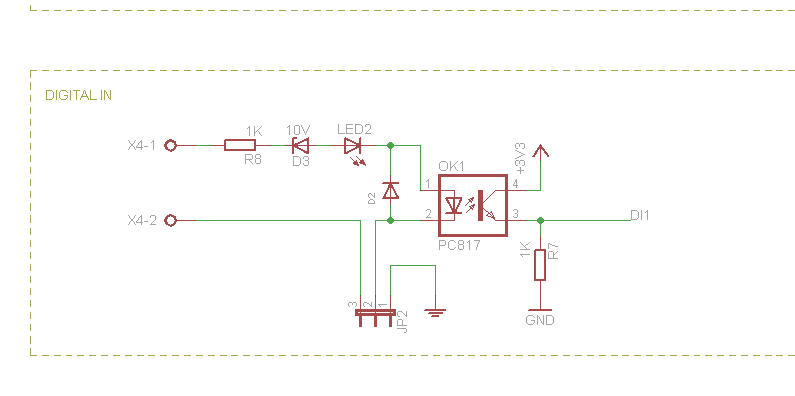
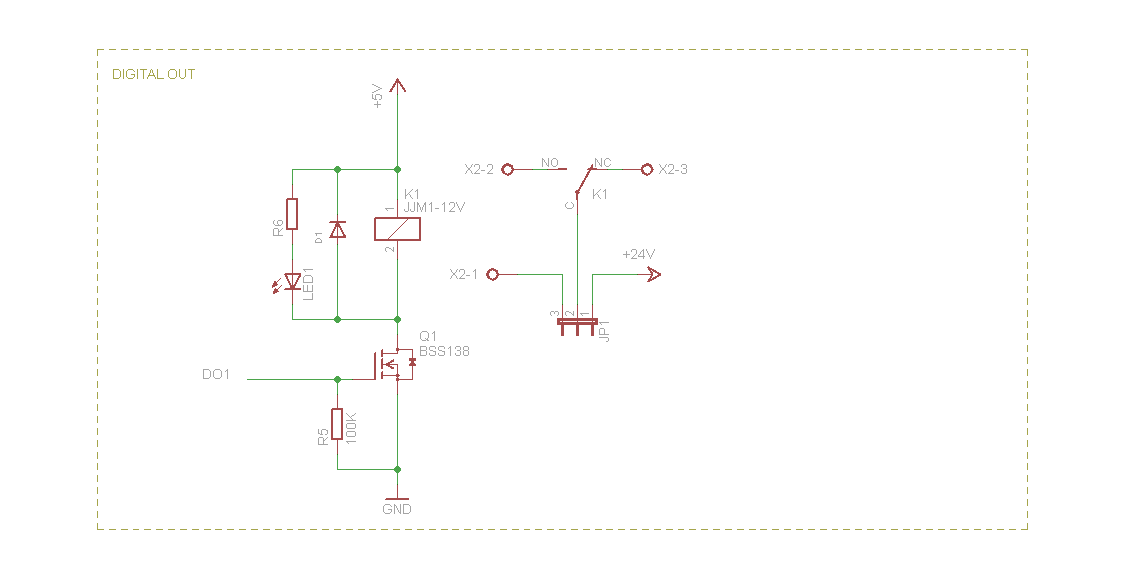
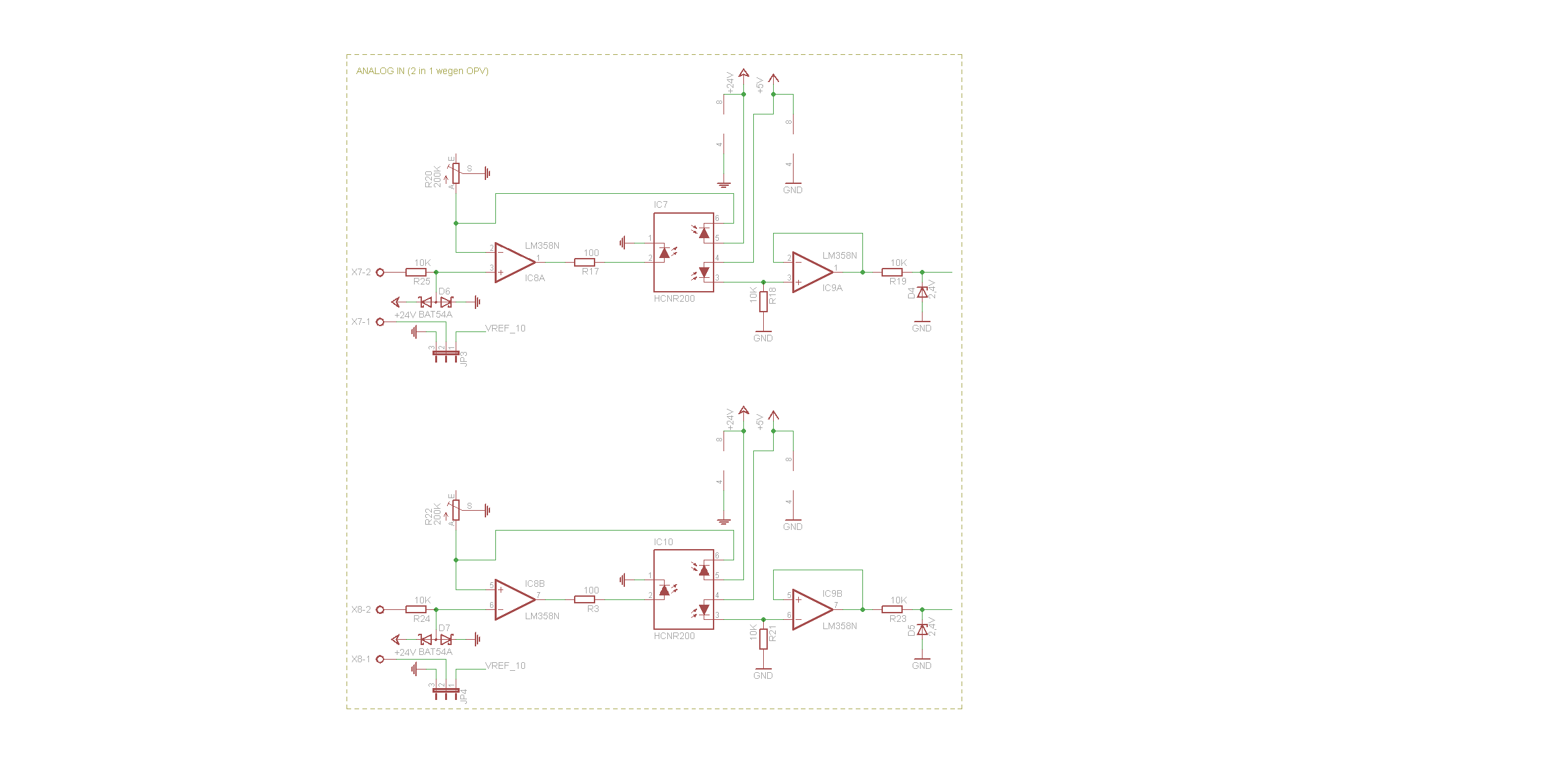
Hallo liebe Community, das ist mein erster Beitrag hier. Natürlich komme ich auch sofort mit einer Bitte ;) Ich arbeite derzeit beruflich an einem Projekt. Wir sind ein Kleinbetrieb in einer Nische des Maschinenbaus und bauen gerade eine Sondermaschine für den Eigenbedarf. Die Maschine ist mechanisch soweit aufgebaut. Gesteuert werden soll die Maschine mittels eines Beaglebone Black (Vorteil: viele I/O's und vor allem die Echtzeiteinheit). Im Moment arbeite ich am Breakoutboard für das Beaglebone Black. Zur Verfügung stehen müssen: - Digitaleingänge für 24V - Digitalausgänge als Relaiskontakte (müssen nicht schnell sein, Steuerung der Achsen erfolgt über CAN) - Analogeingänge, vermutlich 0-10V, trotzdem einstellbar - Analogausgänge, vermutlich 0-10V, trotzdem einstellbar - eine CAN-Schnittstelle zur Ansteuerung der Achsen Die GPIOs des Beaglebone Black verwenden 3,3V. Die Analogausgänge funktionieren mit PWM, die Analogeingänge vertragen maximal 1,8V. Es steht eine Versorgungsspannung von 24V zur Verfügung. Das Board soll eine vollkommene galvanische Trennung des Beaglebone Black aufweisen. Ich habe das Board nun nach bestem Wissen und Gewissen mit vielem Nachlesen hier im Forum zusammengestellt. An dieser Stelle bitte ich nun euch, einen kurzen, oder gerne auch längeren Blick auf meinen Schaltplan zu werfen und mich auf Fehler bzw. Verbesserungsmölgichkeiten hinzuweisen. Allerbesten Dank!! Andy
Angehängte Dateien:
-

BBB_VERSORGUNG.png
6,7 KB -

BBB_DIGITAL_IN.png
2,7 KB -

BBB_DIGITAL_OUT.png
4,1 KB -

BBB_ANALOG_IN.png
15 KB -

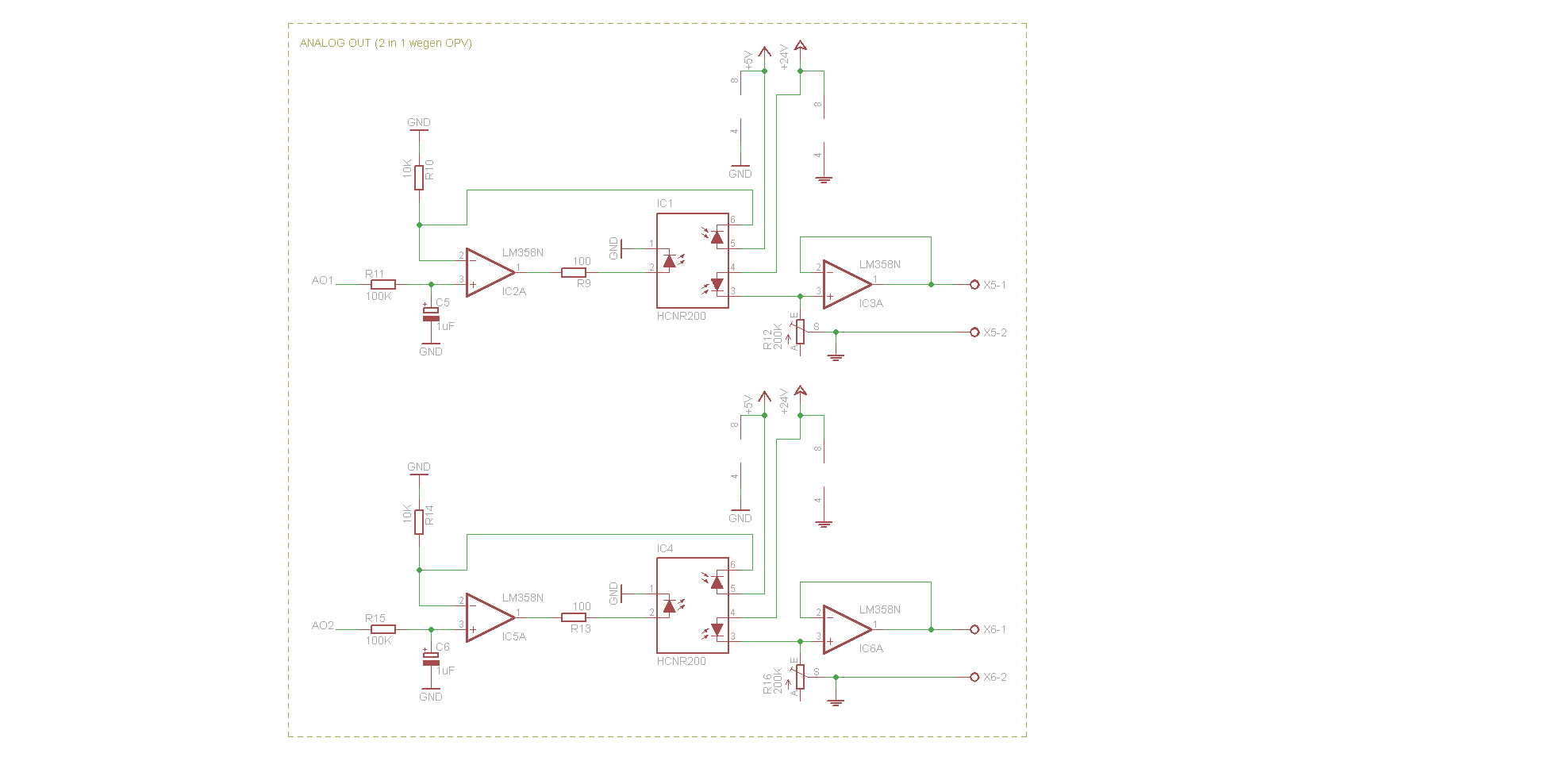
BBB_ANALOG_OUT.png
11 KB -

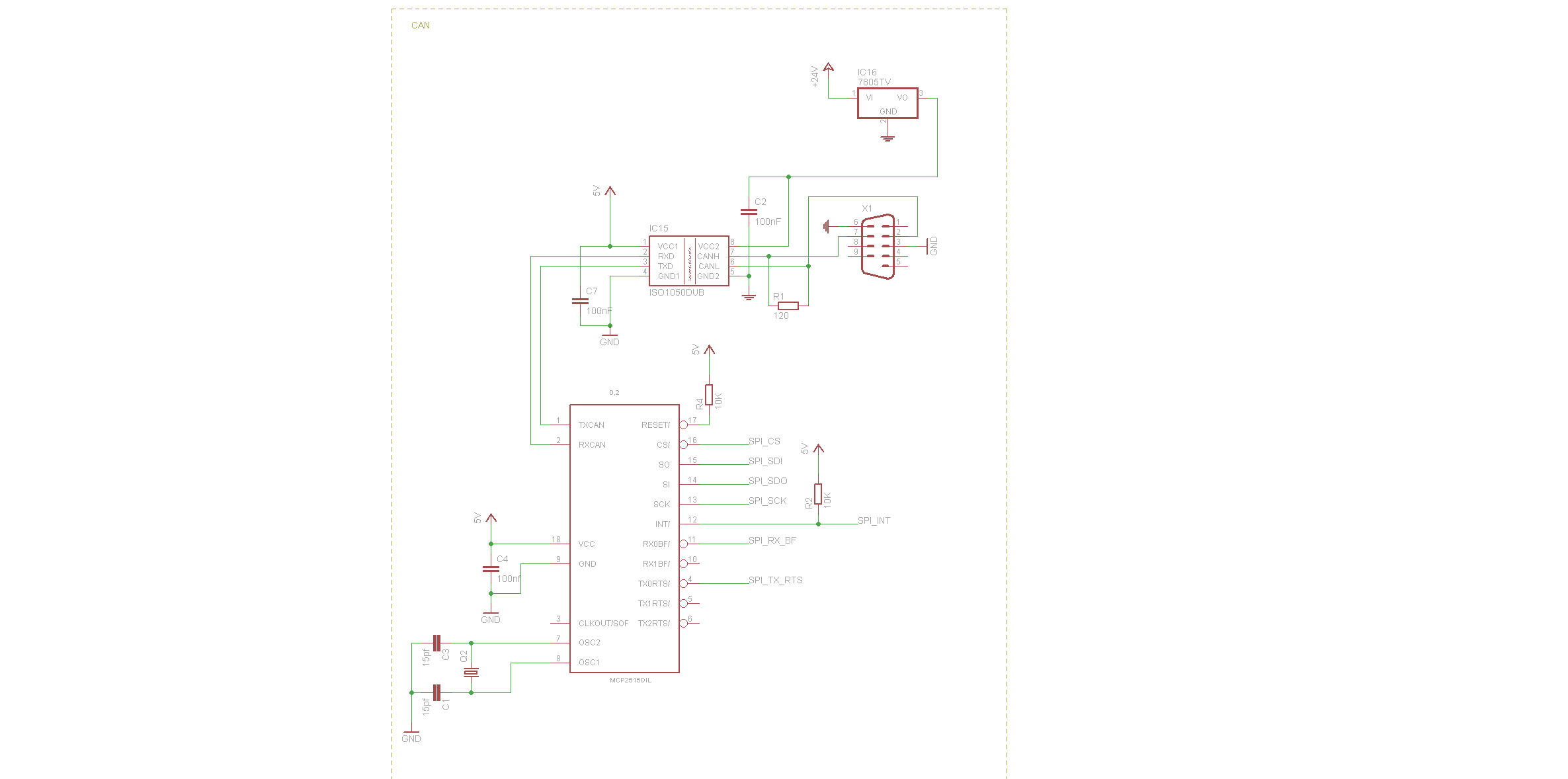
BBB_CAN.png
13 KB
So, da der Thread nun schon auf Seite 4 seht erlaube ich mir einen Push :)
Hallo Andreas, wozu soll der MCP2515 sein? Das BeagleBoneBlack hat doch bereits zwei CAN-Controller onboard. Frank
Hi. Scheint alles sehr sauber zu sein. Mir sind aber dann doch ein paar kleine Dinge aufgefallen: Die OP-Rückkopplung über den Optokoppler in ANALOG_OUT und ANALOG_IN scheint ein sehr guter Trick, allerdings sind die beiden Photodioden des Optokopplers nicht identisch, daher werden sich hier Abweichungen ergeben; ob die noch innerhalb deiner Tolleranz musst du schaun... Die Schutzdioden gegen Masse am Eingang ANALOG_IN scheint falsch herum zu sein. BAT54S könntest du nehmen. Grundsätzlich würde ich im gesamten Design mehr Stütz- und Filter Cs einsetzen (OPs, µC, ...). Gerade mit den Relais ist da einiges an Müll auf den Leitungen. 100nF und 10µF sind z.B. üblich. Die 1µF Cs am Spannungsversorgungsteil würde ich auch erhöhen. Hoffe das ich helfen konnte. Bestes
...noch vergessen: Die OPs können keine 0V am Ausgang liefern: siehe Rail-to-Rail (besser ist aber eine negative Versorgungsspannung) - je nach deinen Anforderungen.
Hallo, danke für eure Antworten! @Frank: Vielen Dank, das war mir bereits bewusst. Der CAN Kontroller muss in meinem Fall echtzeitfähig sein (2 Servocontroller müssen synchronisiert werden, diese erofrdern ein Signal in gewissen Zeitabständen). Deshalb werde ich entweder die Daten per SPI in den Buffer des MCP2515 schreiben und dann mittels der Echtzeiteinheit den Tx-Interrupt auslösen oder eventuell sogar zusätzlich SPI manuell in der Echtzeiteinheit abwickeln. Trotzdem Danke! @Bränko: Ebenfalls vielen Dank für deinen Input!! Diode ist natürlich verkehrt, danke. Der Unterschied zwischen den beiden Dioden im Optokoppler ist in meinem Fall kein Problem, mir geht es hauptsächlich um die galvanische Trennung bei einigermaßen guter Linearität. Aus Interesse: Fällt dir ein besserer Weg ein um analoges Signal galvanisch zu trennen (Außer die wirklich teuren ICs' 20€ aufwärts bzw. Trennung bereits auf der digitalen Seite)? Deine Empfehlung mit den Kondensatoren werde ich berücksichtigen, danke! Ich glaube gelesen zu haben dass ich bis auf einige uV an 0 komme, kontrolliere das aber auch noch. Kannst du mir einen guten OPV für diesen Zweck empfehlen? Will nicht unbedingt eine negative Versorgungsspannung einsetzen müssen... Viele Grüße, Andy
Hi Andy, die Beschaltung der OPs in deinem Design sind grundsätzlich ein Problem. Wenn du eine OP-Eingangs/Ausgangsspannung von 0-5V/0-24V haben willst, kannst du den OP nicht mit 0-5V/0-24V beschalten. Ja, es gibt Rail-to-Rail OPs aber die sind auch nicht wirklich gut. Man kann das Eingangssignal z.B. halbieren und einen DC-Anteil mit auf den Eingang geben - gibt aber dann auch nur den halben Ausgang. Ich kenne leider keine gute Möglichkeit die größere Versorgungsspannung zu umgehen, aber vielleicht hat jemand anderes ja noch eine Idee... Gruß
...wieder was vergessen ;) Ich würde die OP-Teile mal als Testaufbau zusammenstecken und schauen, ob du mit den Ergebnissen leben kannst. Realitätsgeprüft.
Und ich wäre grundsätzlich sehr an einem solchen Board interessiert. Ansonsten kann ich nichts beitragen :-) Daniel
Oh, habe gesehen, dass du einen DCDC für die 5V Analogspannung nutzt. Das gibt eigentlich immer Probleme, wenn man nicht weiß, was man tut. Ich würde nen DCDC mit ~8V nehmen und dahinter nen Linearregler setzen und nicht sparsam mit Kondensatoren sein. Aber wenn du eh nen DCDC nimmst, dann kannst du ja auch nen Dual-Ausgang nehmen oder du stufst mehrfach runter um deine verschiedenen Spannungen zu bekommen, dann ist kannst du den OP z.B. mit 10V betreiben und DC-offset drauf. Ich würde die ganzen Teile mal auf nem Breadboard aufbauen und testen das scheint mir trotz des ersten guten Eindrucks doch noch alles sehr "ungetestet"... Nichts für ungut und viel Erfolg!
Die Beschaltung des HCNR200 solltest du nochmal überprüfen. Die Photodioden sind in Durchlassrichtung gegen Plus geschaltet. Das wird so nicht gehen. Laut Datenblatt haben die Koppler einen Koppelfaktor von typisch 0.5%. Das sind bei 10mA Strom in der Sendediode 50µA im Empfänger. Viel mehr als 10mA werden die OPVs auch nicht liefern können. Mit deinen 10K im Eingang werden die 50µA bei 0,5V erreicht. Danach bist du in der Begrenzung. Den Vorschlag diese Schaltung vorher mal zusammen zu stecken kann ich nur unterstützen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.