Hallo Leute,
ich habe gerade eine allgeimeine Frage bzgl. Design einer Regelung für
ein linear zeitinvariantes System.
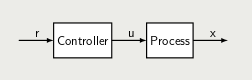
Der Gestalt meiner (open Loop) Regelstrecke sieht wie auf dem ersten
Bild in Anhang aus, wobei sowohl der Controller als auch der Prozess
durch ihre Differentialgleichungen bereits bekannt sind.
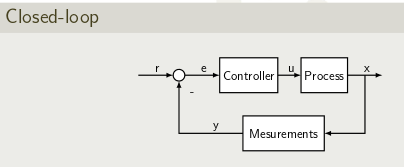
Nun möchte ich eine Rückkopplung (closed Loop) für meinen Regler
entwickeln, wie es auf dem zweiten Bild zu sehen ist.
*Das Problem*: was ich noch nicht verstehe ist: wie entwickle ich einen
Regler, wenn die Eingangsgröße
nicht von der Zustandgröße
abhängt, sondern von ihrer zweiten Ableitung??? Es besteht also der
Zusammenhang:
In der Praxis habe ich folgende Beziehung:
wobei m eine vorgegebene skalare Größe ist.
Wie soll eine Rückkopplung in dem vorliegenden Fall entworfen werden?
Vielen Dank
PS: ich kann noch dazu sagen, dass am Ausgang des Systems auch die
Zustandsgrößen
zur Verfügung stehen