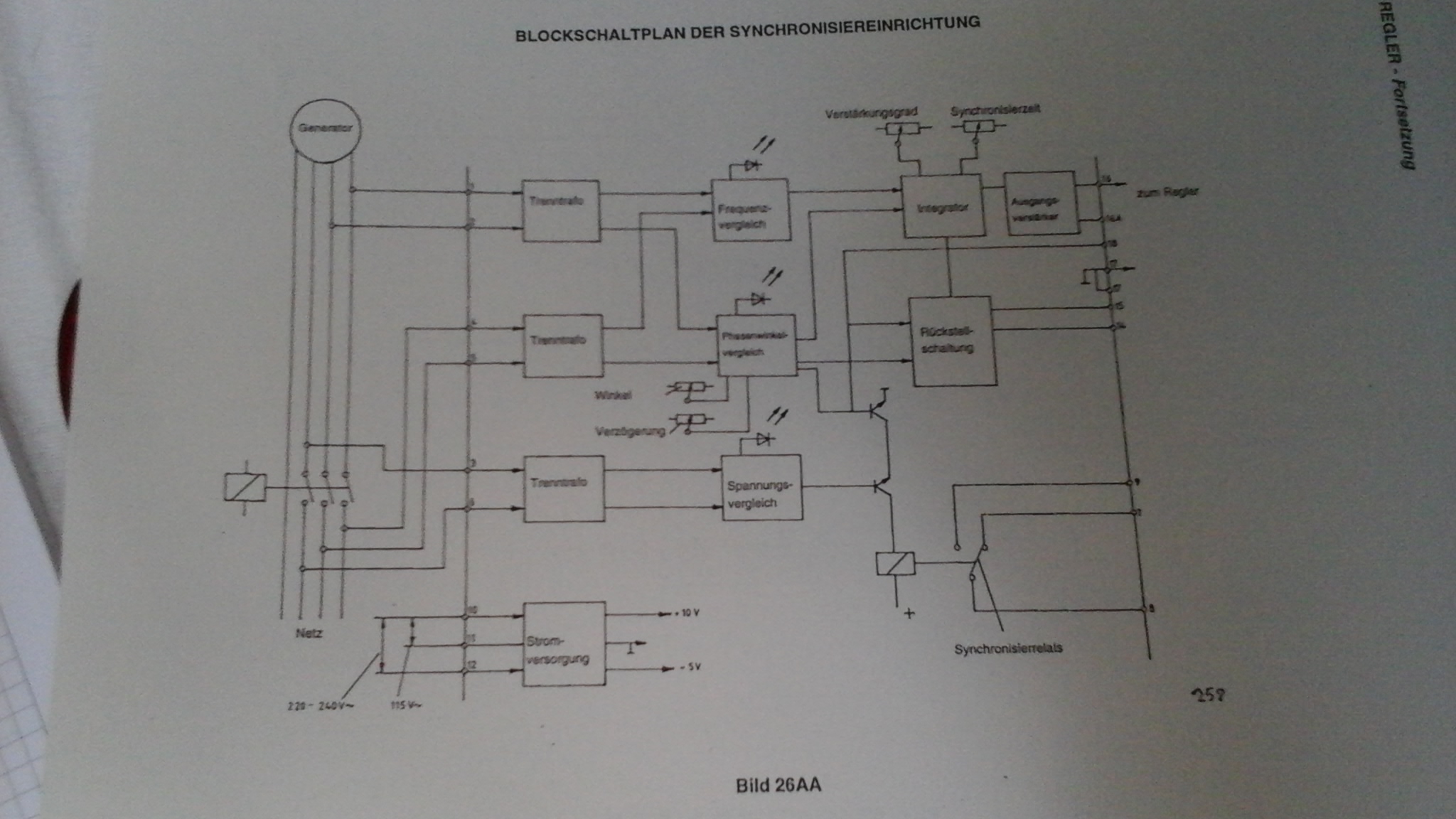
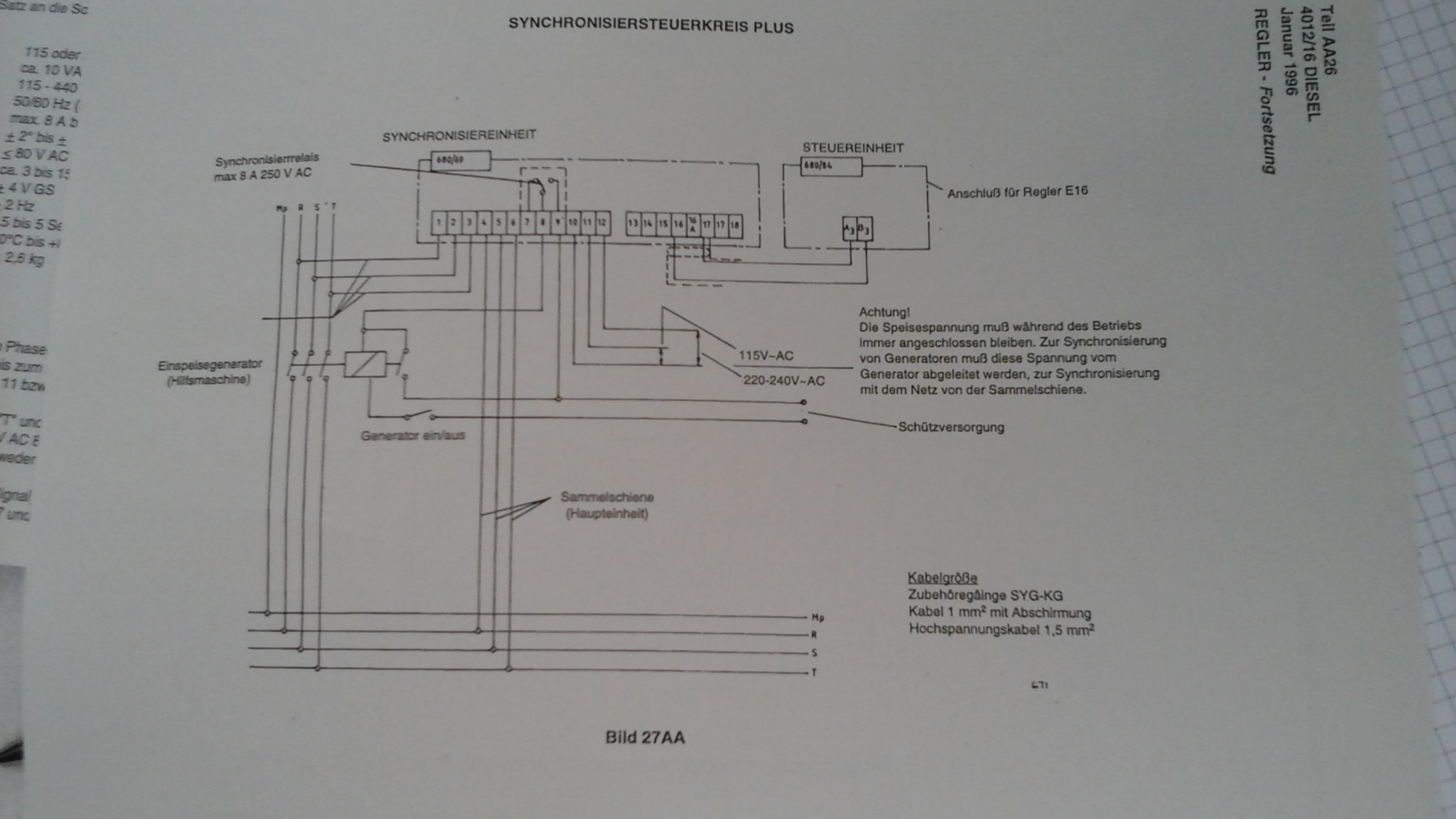
Hallo zusammen, Unzwar habe ich die Aufgabe, den Synchronisationsvorgang, eines Dieselaggregats (8 zyl. Dieselm. + synchrongenerator) zu beschreiben. Das blockschaltbild der synchronisiereinrichtung und der steuerkreis ist im anhang gegeben. Also in der beschreibung steht: Die einheit mißt frequenz, phasenwinkel und spannung zwischen dem netz und dem generator. Der frequenzfehler wird zuerst integriert und auf null reduziert, und der sich daraus ergebende phasenfehler wird von einem integral/proportional regler modifiziert. Daraufhin werden frequenz- und phasenfehler in den synchronisiereingang des reglers eingespeist, und es entsteht ein geschlossener regelkreis. Könnte mir jemand das in anderen Worten erklären ? Gehen wir mal davon aus, dass 10 Hz frequenzfehler vorliegt, wie funktioniert der regelvorgang genau ? Die sprungantwort eines integrators wäre jetzt eine linear steigende gerade. Das ist aber doch noch nicht der richtige regler oder ? Den PI regler sehe ich auch nicht im bild. Und was ist hier das stellglied ? Wahrscheinlich kann hier nur die drehzahl varriert werden, wie geschieht das ? Wäre für jede hilfe sehr dankbar
Angehängte Dateien:
-

1430235464859.jpg
540 KB -

1430237319722.jpg
460 KB
Von Bild 1 (zum Regler) gehts zu Regler E16 in Bild 2. Die Beschreibung nicht gut verständlich. Nicht mal Groß-/Kleinschreibung. Ich könnt mir vorstellen: Frequenzfehler integrieren und auf den Motorregler geben. (klappt ohne große Überschwinger wenn der Motor im Vergleich zur Synchronisationszeit schnell der Regelgröße folgt) Wenn die Frequenzen gleich sind wird der Phasenregler aktiviert (evtl. PI) und der zerrt das ganze synchron. Der PI-Regler (so es denn einer ist) ist vmtl. im "Integrator" versteckt. Evtl. so: Die Einheit misst Frequenz, Phasenwinkel und Spannung zwischen dem Netz und dem Generator. Beim Start der Synchronisation wird der Frequenzfehler integriert und als Steuersignal ausgegeben. Sobald der Frequenzfehler (nicht das Integral) bei Null liegt wird der verbleibende Phasenfehler (PI-Regler) in das Steuersignal mit einbezogen. Das Steuersignal (Frequenz- und ggf. Phasenfehler) werden in den Synchronisiereingang des Motorreglers eingespeist, und es entsteht ein geschlossener Regelkreis. (bereits ab Start des Synchronisationsvorgangs) Sobald Phasenwinkel und Spannung des Genarators innerhalb der Toleranz liegen wird der Generator aufgeschaltet. (ich finde die Frequenz sollte auch passen; ansonsten macht der Phasenwinkel keinen Sinn und könnte zufällig 0 sein)
Witzig. So ein Synchronisiermodul hab ich hier noch irgendwo in der Bastelkiste zu liegen. Beim Start des Generators wird dieser durch den Regler möglichst genau an die Netz-Parameter (Spannung und Frequenz) herangeführt. Dabei weicht die Frequenz immer ein klein wenig ab. Wenn der Frequenz- und Spannungsfehler klein genug ist, wartet die Steuerung bis der Phasenwinkel Null ist und legt dann den Generator-Leistungsschalter ein. Der Generator zieht sich dann auf das Netz fest und kann danach auf Leistung gefahren werden. Sollte der Frequenzfehler oder Phasenwinkel beim Aufschalten aufs Netz zu groß sein, bedeutet das Spaß.
Ich verstehe nicht warum der Regler hier adaptiv mit zwei Zuständen arbeiten soll. Eine PLL macht doch genau was man hier will, oder?
Vielleicht rastet er so schneller ein. Würde mich mal analytisch interessieren.
Danke für eure Antworten! Also Synchronisiereinheit ist nur dazu da, um die Frequenz, Phase und Spannung von Netz und Generator zu vergleichen und den Frequenz und Phasenfehler als Steuersignal an den Motorregler abzugeben. Wie geht das dann weiter ? Der Motorregler erhält jetzt von der Synchronisationseinheit eine Regeldifferenz der Frequenz. Wie verarbeitet der Motorregler das nun ? Die ist drehzahl wird auch abgetastet und an den Motorregler weitergeleitet. Mich interessiert nur, was da genau intern geschieht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.