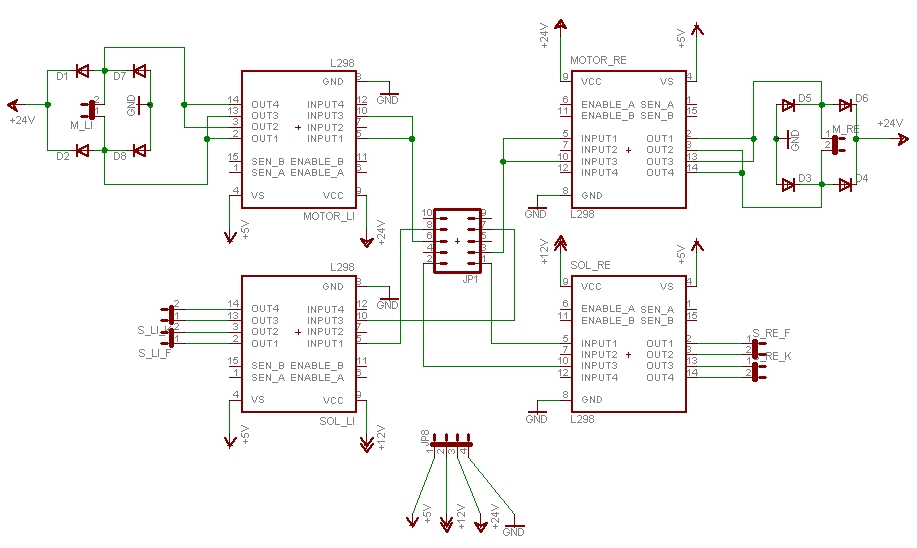
Hallo! Kurze Einleitung: Ich baue in meinre Studienarbeit einen 2beinigen Roboter nach. Die Steuerung übernimmt ein AVR (ATmega8515) auf einem STK500. Dieser Verarbeitet 6 Sensorsignale und steuert dann die 2 24V/ 2A Motoren und 4 12V/?A Hubmagnete über einen AVR-PORT, also 8 Bits. Ich hab mir jetzt mal eine Schaltung ausgedacht, aber da ich eigentl. Maschinenbauer bin hab ichs mit der Elektronik nicht so. Ich bin dankbar für jeden Vorschlag. Mein Assembler-Programm ist auch noch so ne Baustelle ... DANKE! Markus
Angehängte Dateien:
-

schaltplan.jpg
120 KB
Ach ja, hier noch das Programm. Für die Motoren und Hubmagnete gibts nur ein oder aus, keine Drehzahlregelung o.Ä. Danke nochmals! Markus
Hi Markus. Mit welchem Programm hast du diesen Schaltplan gezeichnet? Gibt es Freeware programme für soetwas?
Ja, Eagle, schau mal unter www.cadsoft.de ist ganz brauchbar ... aber eigentlich sollte doch mir geholfen werden .. ;)
Die brauch ich aber eigentlich doch gar nicht, oder? Ich will die L298 "nur" als "Signalverstärker" nutzen. Nur ein- und ausschalten.
Deswegen musst du trotzdem an Enable einen (konstanten) Pegel legen. Mangels Datenblatt weiß ich jetzt nicht, ob an Vcc oder an GND. Bin mir bei deiner Belegung wegen Vcc und Vs am L298 auch nicht sicher. Ich vermute, dass du sie vertauscht hast (Datenblatt...). Im Datenblatt gibt es bestimmt auch ein Tabelle mit den Eingangsbelegungen und dem Ausgangseffekt... Von Assembler habe ich eher keine Ahnung...
Hallo Markus, zu Deiner Schaltung habe ich ein paar Vorschläge: 1. die "enable"-Pins an 5V oder an einen Mikrocontroller Ausgang 2. die "sense"-Pins an Masse, oder über einen kleinen Vorwiderstand an Masse 3. Ich verstehe nicht, was Du machen willst, wenn Du 2 Inputs beschaltest aber alle 4 outputs herausführst. Ich schlage vor, die Eingänge parallel zu schalten. Ich meine Input1 und Input2 an Pin8 von JP1 usw. Dann kannst Du den doppelten, zulässigen Strom entnehmen. OUT1 und OUT2 können dann an einen Pin gehen. 4. Was mein Vorgänger schon sagte: Vcc an 5V und Vdd an 12V Viel Spass beim Basteln! Gruß Marc
Hi Markus, hab' einen Fehler gemacht. Zum Parallelschalten der Inputs: Input1 und Input4 gehen auf Out1 und Out4. Input2 und Input3 auf Out2 und Out3. UND: Nicht die Freilaufdioden parallel zu den Spulen vergessen. Gruß Marc
Hallo Markus, hier noch ne Idee: Für die beiden Motoren ist der L289 schon OK, wenn Du beide Laufrichtungen brauchst. Was dir Hubmagnete Angeht, würde ich diese mit jeweils einem FET, z.B. BUZ11a in "Open Source" ansteuern. D.h. ein Ausgangspin des Mikrocontrollers ist mit dem Gate des Fets verbunden, Source geht direkt an Masse und Drain an Deinen Hubmagneten. Also 12 an den Magneten (Pol1) und Pol2 an den Drain-Anschluss des Fets. Gibt der Controller ein Signal an den FET (Gate), dann leitet der FET und zieht gegen Masse -> Hubmagnet zieht an! Frohes Schaffen Marc
Die Schaltung kann ja "Open Source" sein, nennt sich aber "Open Drain". Und die Hoffnung, dass der BUZ11 mit dem angebotenen Logiklevel am Gate voll durchschaltet, stirbt zuletzt. Arno
Supi! Danke! Das mit den FET's mach ich dann auch mit deh Motoren. Brauche nur ein und aus in eine Drehrichtung. Hatte 2 Inputs beschaltet weden 2*Imax. Hab bald nen neuen Schaltplan! Gruß, Markus PS: was ist das? -> abo
Arno hat recht, heisst "open Source", und ja, der BUZ11a schaltet durch, und nein der Controller stirbt nicht.
Angehängte Dateien:
-

schaltplan.jpg
41 KB
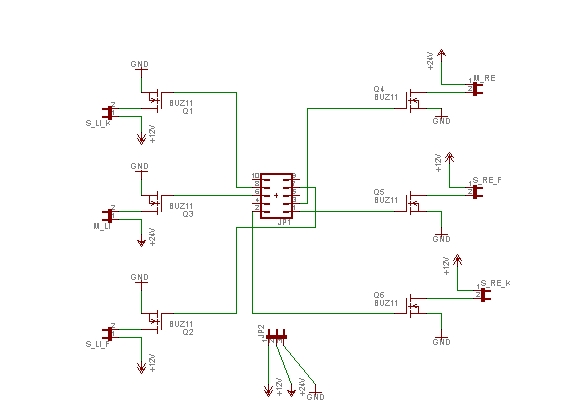
So jetzt ein neuer Schaltplan. Ist das so ok? Wie auch immer diese Schaltung heißt, wichtig ist dass sie funktioniert ;) Danke!
Du solltest den Spulen noch eine Freilaufdiode spendieren, weil du sonst gelegentlich neue BUZe kaufen mußt... "Open-Source"... Klar kann man einen MOSFET auch mit Open-Sorce betreiben, siehe Basis-Schaltung von Bipolar-Transistoren. @Bytewood: Fällt deine Schaltung unter die GPL oder die LGPL?
Hi Markus, jep, sieht gut aus! NUR, da Du mit einem Haufen Spulen zu tun hast, solltest Du parallel zu ihnen jeweils eine Freilaufdiode einsetzen. Im datenblatt des BUZ11a ist zwar eine Diode zwischen Drain und Source mit eingezeichnet, doch weiss ich nicht genau, ob diese als Freilaufdiode verwendbar ist. Bei meinen Steuerungen mit FETs/Transistoren setze ich immer Freilaufdioden ein. Als Type könntest Du die Feld-Wald und Wiesen Diode 1N4001, 1N4002 (0,02)einsetzen, oder schnellere Gleichrichterdioden vom Typ BYV27 (0,2)/ BY296 (0,09). Schau einfach mal in den Reichelt Katalog. Ach ja, mit Assembler kenne ich mich absolut nicht aus. C/Bascom OK. Gruß Marc
Hey Eckbal, Um diese Uhrzeit solltest Du arbeiten und nicht im Forum rumhängen ;-)))) CU Marc
Und du solltest mit P.S. aus H. kuscheln! Die Diode des BUZ11 ist eine parasitäre, sprich: sie ist wegen des internen Aufbaus des MOSFET vorhanden. Wer etwas Ahnung von Elektronik hat, wird auch feststellen, dass die Diode nur innerhalb einer H-Brücke einen Sinn macht. Übrigens gibt es modernere Bausteine als den L298 und den BUZ11... Bytewood verwendet vermutlich auch noch den 741 als OP... @Marc: Meine Platine wächst... Sie wird etwa 6 Lagen haben... Kannst du das mit deinem umgebauten Eierkocher am Wochende mal machen?
Und wie soll ich die Dioden einbauen, also welche Richtung? von +12V/+24V nach GND nehme ich an, oder?
nee, wenn du die Diode so einbaust, wird sie nur sehr zur leben... Sie muß mit der Kathode (Strich am Symbol und am Bauteil) gegen +12V/+24V und die Anode an den Drain-Anschluß des Transistors.
Hi Markus,
also, die Seite mit dem Strich (Kathode) an die Spannung, und die Seite
mit dem Dreieck (Anode) an Drain :-))
+V ----|/------Drain
|\
Zur Schaltung: z.B. S_RE_F Diode zwischen Pin1 (Kathode) und Pin2
(Anode)
Das sind absolute Basics, die sollte man auch als Maschinenbauer
wissen.
Gruß
Marc
Da hat Marc recht... zumindest sollte man sich diese Basics im Rahmen einer Studienarbeit durch Buch-Lektüre (oder die eine oder andere Internet-Quelle) aneignen. Marc hat es schliesslich auch im Rahmen seiner Projektarbeit gelernt.. @Marc: Was macht eigentlich IB_M_? Ist der inzwischen rausgeflogen? Oder hat er einen Küvetten-Click-Button-Call-Center aufgebaut?
@Rahul IBM & CO: das hat hier im Forum nichts zu suchen. @Markus Noch ein kleiner Vorschlag zu Deiner Schaltung: 1. Wenn möglich, dann schalte Deine Ausgangspins an JP1 alle schön nebeneinander, dann kann man einfach besser zählen (wenn alles aufgebaut ist). 2. An JP1 sollte auch irgendwo eine GND Leitung hin. Ich nehme mal an, dass der Controller auf einer anderen Platine sitzt, und eine gemeinsame Masse ist durchaus empfehlenswert. Gruß Marc
Ja, ja schon klar ;) ist nur schon eine Weile her. Wie dick breit sollten die Leiterbahnen bei 12V/24V und ca 2A sein?
Hallo ... ich danke euch für eure Hilfe. Versteht mich nicht falsch, aber das was ich mit der Steuerung mache überschreitet bei Weitem das was ich eigentlich machen muss. Außerdem weiß so mancher Maschinenbauer mit Sicherheit mehr über E-Technik als ein Elektrotechniker über Maschinenbau. Aber das ist hier nicht Thema ;). Das mit GND leuchtet ein. Jetzt weiß ich auch, warum auf dem STK500 noch an jedem Port-Ausgang ein GND-Pin ist. Was ist VTG? Und ja, der µC sitzt auf dem SKT500 und die BUZ auf ner seperaten Platine. Danke nochmal.
VTG = Vtargetm also die Spannungsversorgung des Zielsystems. Wenn der vtarget-Jumper gesteckt ist, kann man über das STK500 das Zielsystem versorgen. Wenn er nicht gesteckt ist, dann eben nicht...
Zu Etechniker und Maschbau: Deswegen bin ich Mechatonik-Ing... Von allem fast keine Ahnung... (nee, andersrum: Von allem etwas Ahnung; Optik kann ich auch ein wenig...)
@Markus Was die Leiterbahnenbreite angeht - so breit wie möglich. Ich hab' in einem Nomogramm nachgesehen: Für 2A solltest Du so um die 0,2mm benötigen, ABER im Anzugsmoment ist Dein Strom WESENTLICH größer. Daher empfehle ich Dir so minimum 2mm (entspricht ungefähr 5A, 2,7mm für 6A) Annahmen dabei: Leiterbahntemp. soll sich nicht mehr als um 20K erhöhen, ohne Zwangskühlung, Leiterbahnendicke 0.035mm Standard-Platine). Viel Spass beim Basteln Marc
@Markus Ich kann Dir nur das Buch "Taschenbuch der Elektrotechnik", Kories/Schmidt-Walter (Verlag Harri Deutsch), ans Herz legen. Darin sind alle Grundlagen nachschlagemäßig zusammengefasst. Reicht für ne Lebenszeit. (26,80)
Hallo, das 2te Schaltbild läßt die Motoren nur in einer Richtung laufen, also wird er 2beinige Robbie wohl auf die schnauze fallen. Oder habe ich irgend etwas übersehen ? Gruß, Arno
>Brauche nur ein und aus in eine Drehrichtung.
Steht irgendwo oben.
Hallo, die Frage bleibt aber, funktioniert soetwas nur mit vorwärts und stopp? Oder ist ein 2beiniger Roboter nicht so ein Ding, welches mit 2 Rädern balanciert ?
Hallo. Ja TH Karlsruhe und 2 Beine, weil er 2 Beine hat. keine Rollen. Die Motoren Spannen Federn zum Antrieb.
Hallo Markus, Hier noch ein Vorschlag zur Schaltung: Wenn Du Zeit und Lust hast, dann könntest Du ein paar mehr FETs auf die Platine löten (nach demselben Schaltbild) und könntest dann anstatt Gleichstrommotore auch Schrittmotore einsetzen. Ansteuerungsart: Unipolar, 4 Fets pro Motor. Damit könnest Du z.B. die Federn in einer bestimmten Stärke spannen, oder was auch immer. Gruß Marc
Hallo Markus, da habe ich dann wohl etwas durcheinander gebracht sorry. Gruß, Arno
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.