Ich habe mal eine Verständnisfrage zu einer Lageregelung, welche als Kaskade ausgelegt ist. Also wo die äußere Regelung für den Lagewinkel und der innere Regelkreis für die Regelung der Drehrate verantwortlich ist. Wenn der äußere Regler nur ein P-Glied besitzt wird ja der Regelfehler(also ein Winkel) nur verstärkt/gedämpft. Und dieser Wert dient dann als Sollwert für den inneren Regelkreis? Benötige ich als Sollwert für den inneren Regelkreis nicht eine Drehrate um aus dieser dann mit Hilfe des Istwertes(also zum Beispiel Messwert eines Gyros) den Regelfehler für den inneren Kreis zu ermitteln?
Angehängte Dateien:
-

Kaskade.png
95 KB
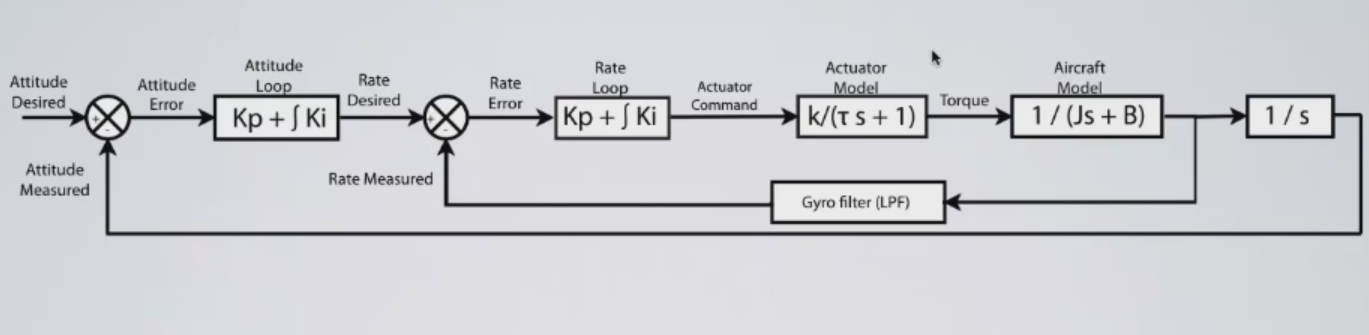
Ich habe mal die Regelkreisstruktur als Grafik angehangen um mein Verständnisproblem zu verdeutlichen. Der äußere Regler ist in diesem Fall ein PI-Regler, welcher den Regelfehler mit dem P Anteil verstärkt/dämpft und mit dem I-Anteil der Regelfehler aufintegriert und nochmal skaliert wird. Und da kommt nun eine Sollrate raus? Das versteh ich nicht. Ich wäre wahnsinnig froh wenn mir jemand auf die Sprünge helfen könnte.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.