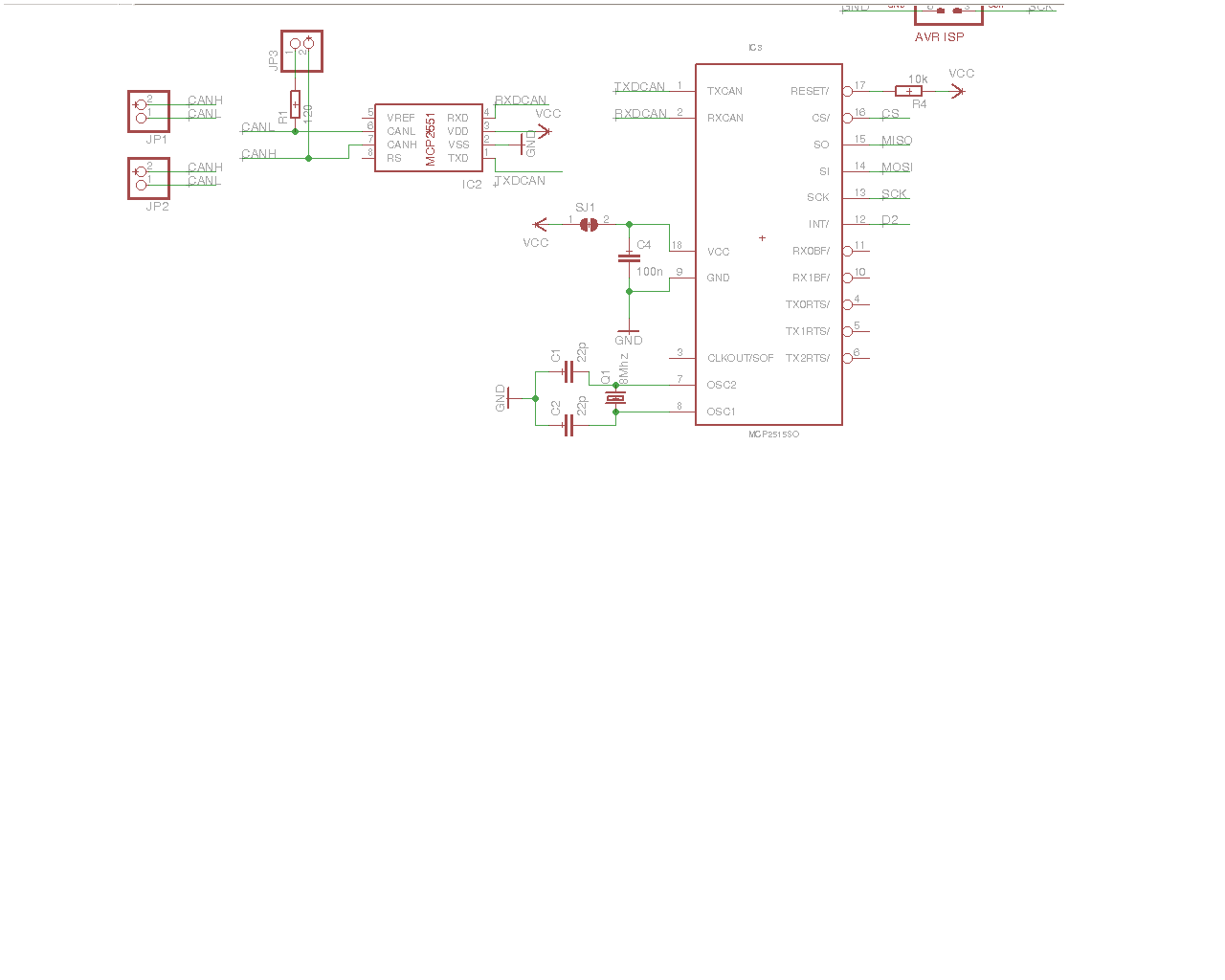
Guten Abend zusammen, ich schlage mich gerade mit dem MCP2515 und seinem Kollegen den MCP2551 rum. Ich habe 2 Arduino Uno's mit dem gleichen Aufbau der Schaltung wie im Anhang am laufen. Aber es findet keine CAN Bus Kommunikation statt. Ich verwende eine Bücherei mit Beispiel aus dem Internet, aber irgendwie vertraue ich der nicht wirklich. Sie meldet zwar über Serial CAN Init ok aber trotzdem kann das ja alles heißen. Bus Terminierung habe ich schon überprüft auf beiden Seiten sind 120 Ohm Widerstände und im ausgeschaltetem Zustand hat der Bus einen Widerstand von 60 Ohm. Beide Quarze schwingen ordentlich an, und auf dem SPI Bus ist auch was los. Es wäre nett wenn sich jemand mal den Schaltplan anschauen könnte und mir sagen könnte ob da Fehler drin sind. Wenn nicht dann wird es wohl an der Bücherei liegen. Vielen Dank im voraus
Angehängte Dateien:
Ach die Arduino-Fraktion mal wieder... - Bitte den VOLLSTÄNDIGEN Schaltplan posten - Bitte den Code posten - Siehst du Nachrichten auf dem CAN-Bus? Also tut sich etwas auf CANH und CANL?
Investiere ca. 5..15€ in ein Logic Analyzer (Clone), betreibe diesen z.B. mit der freien Software Sigrok und schon kannst Du sowohl die SPI vor dem MCP als auch den CAN selbst genauestens debuggen. Anzeige der Übertragungen im Klartext, Bedienung ist ein Kinderspiel. Besser geht es kaum.
das wird sicherlich nicht der ursprüngliche Fehler sein würde aber dem MCP2551 auch einen 100nF Kerko zw. VDD und VSS spendieren. Schau die mal die RS-Beschaltung im Datenblatt an glaube damit kann man neben der Risetime auch in den Standby wechseln.
Danke für die Antworten. Ich habe dem MCP2551 100nF spendiert, und habe den RS Pin jetzt mal auf Masse gelegt und schon geht es. Schönen Sonntag noch :D
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.