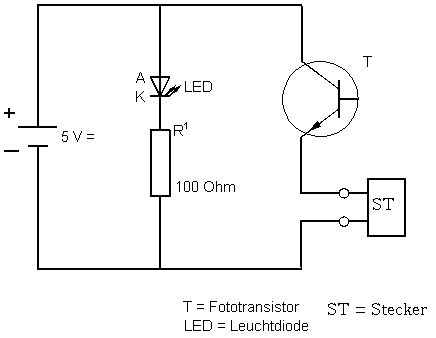
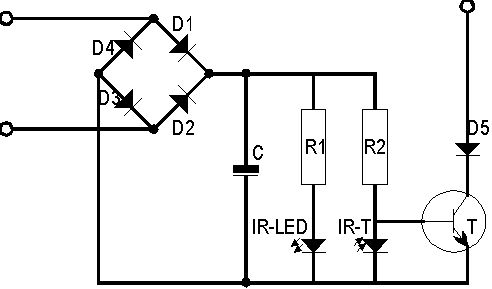
Aufgabenstellung: 1. Bau einer Lichtschranke 2. Zählen mittels (MEXLE 8252-Board) der Umdrehungen eines Rades welches durch die Schranke läuft. 3. Übertrag auf einen anderen Chip (MEXLE ATMEGA????????-Board) Zu1 Schaltplan Lichtschranke mit Forotransistor 1. Lichtschranke 2. Scheibe 3. Motor Oder Infarot Über die Dioden D1-D4 (1N4148) in der Schaltung wird die Lichtschranke mit Strom versorgt. Der Kondensator C (10 µF) ist als Glättungskondensator eingefügt, um minimale Schwankungen im Digitalstrom auszugleichen. Über R1 (1 kOhm) wird zunächst die IR-LED (IRL80A / IRL81A) betrieben, die die eine Hälfte der Lichtschranke darstellt. R2 (120 kOhm) bildet zusammen mit dem IR-Transistor IR-T (LPT80A) einen Spannungsteiler. Über D5 (1N4148) wird das Mexle-Board angeschlossen. Dieser Ausgang kann vom Transistor T (BC337-40) auf negatives Potential geschaltet werden. Fällt kein Infrarotlicht auf IR-T, wird die Basis von T über R2 auf positives Potential gezogen, T leitet. Wenn IR-T leitet, weil die Lichtschranke nicht unterbrochen ist, wird die Basis auf negatives Potential gezogen und T leitet nicht. Bauteil Bezeichnung D1-D5 Universal-Diode 75 V 100 mA DO35 R1 Widerstand 1kOhm R2 Widerstand 120kOhm C Elko 10 µF ø 5x11mm Elko 22 µF ø 5x11 mm T Transistor npn BC337-40 IR-LED Infrarot-Diode IRL80A Infrarot-Diode IRL81A IR-T Fototransistor LPT80A
Angehängte Dateien:
-

Lichtschranke.gif
3,9 KB
und jetz sollen wir deine hausaufgaben machen, ja ?
Angehängte Dateien:
-

mexleboard.jpg
92 KB
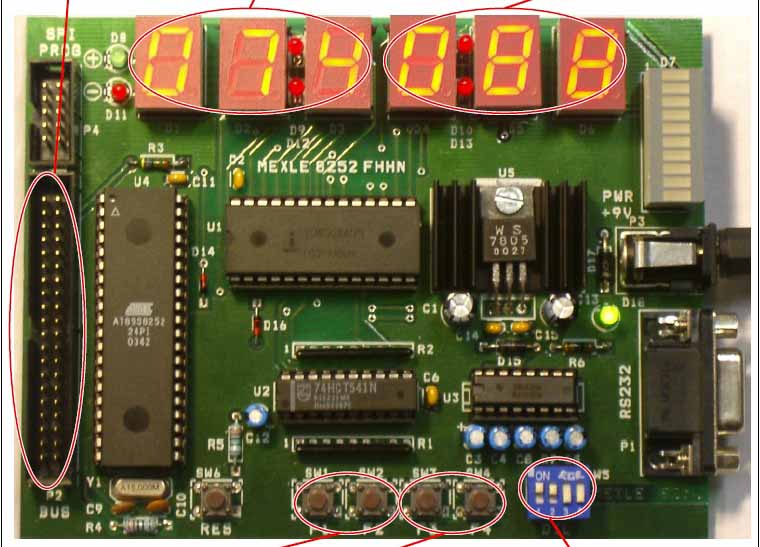
Wie kann ich das lösen hat jemand schon einmal so etwas ähnliche gemacht ? Ich würde es gerne mit c schreiben und wissen ob ich die lichtschranke via fototransistor oder IR LED machen soll? Und woe ich das ganze dann an das mexle board anschließe
Also nix das ist keine Hausaufgebe! Ich möchte die UMdrehungsgeschwindigkeit verschiedener motoren messen und so bin ich suf die idee mit der lichtschranke gekommen. Da ich Modellautos baue und somit die leistund verschiedener Motoren auswerten kann. ALso kann mir dabei jemand Helfen.
Dein Problem scheint zu sein, daß Du Dir in Schaltungstechnik und in Programmierung erstmal ein bestimmtes Grundwissen aneignen mußt und das kann ein Forum wohl nicht bieten. Eventuell entsprechende Kurse belegen oder Arbeitsgemeinschaften beitreten. Peter
Ja was willst Du uns denn mit den Bildern sagen? Das sieht doch schonmal nett aus, aber was willst Du wissen? 3N
Ich möchte wissen welchen der zwei schaltungen eher für das zählen der undrehung geeignet ist. und wie die ansteuerung zum mexle board ist also welche pins ich ansteuen muß.
Die Schaltflanke einer Lichtschranke könnte zu langsam sein, ich würde mindestens noch einen Schmitt-Trigger nachschalten, z.B. ein Gatter des 74HC14. Sonst triggert der AVR mehrfach. Es gibt auch magnetische Sensoren mit integrierter Triggerschaltung, aber wenn die Scheibe nicht stört, ist das die billigere Lösung.
Tag An deiner Stelle würde ich die Motoren auch mit Bremsmoment messen, da die Leerlaufdrehzahl alleine nichts aussagt. Reihenschlussmotoren zerstöhren sich übrigens selbst wenn man sie im Leerlauf betreibt. Zusätzlich würde ich Strom und Spannung am Motor bei verschiedenen, bekannten Bremsmomenten messen um eine einigermaßen brauchbare Motorkennlinie zu erhalten. Erstmal einige Fragen zu deiner 2.Schaltung: Was hängt am Brückengleichrichter (D1-D4)? Ist da ein Traffo oder irgend eine andere Schaltung? Wo ist deine Masseverbindung zum AVR-Board? Den Fototransistor in deiner Schaltung mußt du anders herum einbauen. Wie schaut die Beschaltung des Pin's auf dem Board aus an den du die Lichtschranke anschließen willst? Wenn du die Schaltung wie du es beschrieben hast so einfach an einen INT-Eingang (Ingang mit externer Interupterkennung) hängst, dann wird die Schaltung nicht funktionieren. mfg Sepp
Hallo Sepp hier ist der schaltplan . (D1-D4) hängt die stromversorgung 5v Wie ich das ganze an das board anschließe frage ich mich auch da ich nicht genau weiß welche pins angesteuert werden müssen. ich denke die schaltung 1 mit fototransistr ist die einfachere lösung. Aber wie bekomme ich nun die ganze sache an das mexle board der eingang wird bei mir der P2 Bus sein siehe mexleboard.jpg links. aber welche pinns nehme ich da?
Salve Ich würde INT0 bzw. INT1 des µC's verwenden. Wie diese Pins aber über den Buskonnector geschleift werden kann ich dir leider nicht sagen. Da mußt du dir das Datenblatt/Beschreibung deines Board's anschauhen. Die 1. Schaltung wird höchstwarscheinlich funktionieren. Du mußt nur darauf achten dass der Fototransistor in Sperrrichtung betrieben wird. Es hann aber sein dass der Fototransistor zu wendig leitend wird wenn licht darauf fällt. In diesem Fall würde ich dann einen Transistor in Darlingtonschaltung verwenden. mfg Sepp
Angehängte Dateien:
-

schaltung.gif
1,7 KB
{kind=link}
{kind=link}
{kind=link}
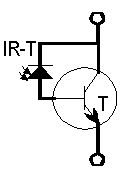
Tag Das Datenblatt vom Mikrocontroller hilf dir nicht viel. Wie der Bus-Baustein funktioniert steht nicht im Datenblatt des Mikrokontrollers, sondern im Datenblatt/Beschreibung des Boards. (Und ich habe nicht die Lust und auch nicht die Zeit um mich für einen anderen in sein Board einzuarbeiten.) Du mußt schon selber schaun wie du bei deinem Board die Pegel an den INT0 bzw INT1 des Mikrocontrollers bekommst. Mit diesen Pins kannst du einen Interrupt auslösen wenn sich der Pegel ändert. (Erkennung der steigenden Flankr, der fallenden Flanke und erkennung eines Pegelwechsels.) Damit kann man einfach Impulse zählen. Eine Darlinktonschaltung nennt man wenn 2 Transistoren zur erhöhung der Verstärkung dierekt hintereinandergeschalten werden. Da diese Schaltung aber im Vergleich zu einem einzelnen Transistor extrem langsam ist, verzichtet man darauf wenn es geht. Ich habe ein Beispiel einer Darlingtonschaltung aus Fototransistor und Transistor beigefügt.
Danke Wie ich auf die INT0 Komme weiß ich nun aber das mit dem interupt weiß ich nicht genau kannst du mir ein beispiel schicken zu (Erkennung der steigenden Flankr, der fallenden Flanke und erkennung eines Pegelwechsels.) währe echt super und vieleicht auch noch wie ich die periodendauer bestimme und damit dann die umdrehung berechnen kann. gruß Chris
Mein Tipp währe dass du dir das Datenblatt des Mikrocontrollers genau durchzulesen. Da steht genau beschrieben welche Register mit welchen Werten beschrieben werden müssen um die gewünschte Funktion zu erhalten. Um das Programm zu schreiben würde ich dir zum Programm "Code Vision AVR" raten. Dieses Programm ist ein gratis C Programierprogramm und hat eine eigene Programierhilfe. Da mußt du beim Erstellen des neuen Projektes nur einstellen welchen µC du verwendest und welche Funktionen du willst, und das Programm erstellt den Großteil des Quellcodes von selbst. (Natürlich mit Dokumentation.) Das hat mir am Anfang beim Verstehen der diversen Funktionen sehr geholfen. Die Drehzahl des Motor's kannst du auf 2 Arten errechnen. Entweder du stoppst mit einem Timer wie lange es gebraucht hat bis der Motor eine gewisse Anzahl von Umdrehungen gemacht wurden oder du stoppst eine gewisse Zeit und zählst wie oft sich der Motor gedreht hat. mfg Sepp
PS: Ich habe mal vor einiger Zeit ein C-Programm geschrieben, mit dem ich die Signale meines Modellbauempfängers über INT0 und INT1 ausgemessen habe. (Der Empfänger hatte manchmal gesponnen.) Ich schau mal ob ich es irgendwo finde. mfg Sepp
ich habe die software und habe mir das mal angeschaut und ein neues projekt gestartet . währe echt super wenn du das C-Programm findest. Danke Chris
Salve Ich hab mal etwas rumgestöbert und dieses Projekt gefunden. Es ist nur ein kleines Projekt dass ich erstellt habe um meinen Modellbaempfänger auszumessen. Der Großtteil des Codes ist aber für die 7-Segmentanzeige für die ich zu diesem Zeitpunkt noch keine eigene Funktion geschrieben hatte. Schreib einfach wenn du noch fragen hast. mfg Sepp
Jetzt kann jedeer von dem fertigen prog evtl provitieren
was meinst du mit Darlingtonschaltung wie ist die aufgebaut? 2 Transistoren, die so verbunden werden: E1 -> B2
Multipliziert die Verstärkungen der beiden verbauten Transistoren. http://de.wikipedia.org/wiki/Darlington-Schaltung
@christian >Aber wie bekomme ich nun die ganze sache an das mexle board der eingang >wird bei mir der P2 Bus sein siehe mexleboard.jpg links. >aber welche pinns nehme ich da? Auf der rechten Seite ist doch der Externe Busverbinder! Die Pins 26, 28, 30, 32, 34,36, 38 und 40 ist Port 2. Da einfach dein Signal draufgeben z.B Pin 40 = P2.0, wenn Du Pach-Kabel hast sollte dies kein Problem sein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.