Guten Tag, ich habe mir überlegt, im Rahmen eines Projektes, einen Messaufbau zu realisieren, in dem der relative Abstand zweier elektr. Bauteile zueinander ermöglicht wird. Genauer: Ich möchte die induktive Energieübertragung zweier Spulen in Abhängigkeit des Abstandes/Winkels zueinander automatisiert messen. Anforderungen: -> 5 Freiheitsgrade (nicht Höhenverstellbar) -> sollte C-Programmierbar sein Ich habe wirklich nicht sehr viel Erfahrung mit Mikrocontrollern.. Ich dachte mir man hat einen Linear-Schrittmotor1 (x-Richtung) auf dem ein zweiter Linear-Schrittmotor2 (z-Richtung) befestigt ist. Auf dem zweiten Linear-Schrittmotor sitzt ein Motor der rotiert, auf dem dann die Sendespule montiert ist. Da fehlen mir dann immer noch zwei rotatorische Freiheitsgrade.. Ist das überhaupt zu realisieren? Viele Grüße
Das geht fast in Richtung Roboter-Kinematik. Du möchtest also 2 translatorische Freiheitsgrade und 3 rotatorische - richtig ? Anstelle einer sehr komplizierten Mechanik, könntest du auch die beiden Teile (Sender+Empfänger) getrennt aufbauen. Nach der üblichen Konvention (bei Robotern) nenne ich den Abstand in der Fläche/Ebene=(X,Y) - die Höhe Z soll bei dir konstant sein. Dazu kommen die Orientierungen A(um Z), dann B(um Y) und C (um X). Folgende Idee: der Sender sitzt auf ein einer Linearachse die den Abstand X verfährt und darauf ein Servo der die A-Drehung macht. Der Empfänger sitzt auf einer zweiten Achse, also Y, und auch hier zwei weitere Servos, die B und C Drehung realisieren. Die Linearachsen kann man relativ einfach mit Schrittmotor+Zahnriemen aufbauen (so wie bei den 3D-Druckern), die Servos kommen aus dem Modellbau. Das Ganze würde ich vielleicht mit einem Raspi ansteuern, kann man dann mit C/C++ programmieren Noch eine Frage: Bei Spulen (zumindest bei Zylinderspulen) ist eine axiale Drehung nicht für die Kopplung relevant, dh. du könntest auf einen Freiheitsgrad verzichten und benötigst nur 4 Achsen, wäre das eine idee ?
Hallo, sry die Überschrift mit 6 Freiheitsgraden ist nicht korrekt (hab ich vergessen zu ändern), weil mir kurzfristig eingefallen ist, dass ich Z konst setzen kann.. wenn ich den Sender und den Empfänger jeweils auf einen trans. Schrittmotor montiere (X;Y), sollte zwischen den beiden Spulen jedoch kein Streckenabschnitt von dem darüber liegenden Schrittmotor liegen. Gibt es da Motoren, an denen ich die Spule auch unten montieren kann? Ich brauch alle 3 rotat. Freiheitsgrade, da es sich um keine gewöhnliche Zylinderspule handelt. Auch das kann ich mir kaum vorstellen, wie ich da die zwei Servos für die B und C Drehung geschickt zusammenbauen soll? Gibt es da 2-Achs Servos? Danke und viele Grüße
Beruf oder Diplomarbeit? Wenige Messungen als Mittel zum Zweck - oder ist ein immer wieder benötigter Messaufbau das gewünschte Endergebnis? Ich habe das mal zur Verifikation von Messergbnissen in meiner Diplomarbeit gemacht, da war aber ein Portalsystem vorhanden, dass mir XYZ Positionswerte über eine RS232 rausgetan hat, die ich dann nur noch mit den Messwerten aus einem DMM (skalare Feldmessung über Detektor) in eine CSV Datei mittels eines kleinen C-Programms wegschreiben musste. Wahrscheinlich ist ein kleiner Industrieroboter das Einfachste, falls Du noch im Hochschulbereich bist - und einen Laboraufbau - z.B. bei den Automatisierern kurzfristig und ggfs auch wiederkehrend in Beschlag nehmen kannst. Sowas wie ein Mitsubishi Melfa Roboter RV-M1 sollte eigentlich in jeder Hochschule rumstehen - vielleicht in modern. vg Maik
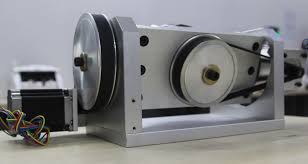
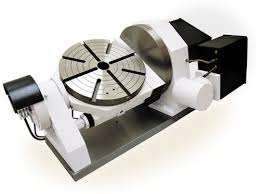
Ja ok: dann kommt auf die Linearachse in Y-Richtung(senkrecht) der 2-Achs Servo (siehe rechtes Bild) (A und C Drehung) und auf die Linearachse in X-Richtung(horizontal) müsste ich noch eine Art "Wippe" realisieren für die(B-Drehung), ich denke da an ein längliches Bauteil, welches an beiden Enden höhenverstellbar ist. Das würde ausreichen.., wenn ich mir das genau überlege, brauch ich nur +- 70 Grad max Bewegungsfreiheit für die C und B Drehung..
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.