1 |
|
2 | #include <LiquidCrystal.h>
|
3 | LiquidCrystal lcd(28, 30 , 5, 4, 3, 2);
|
4 |
|
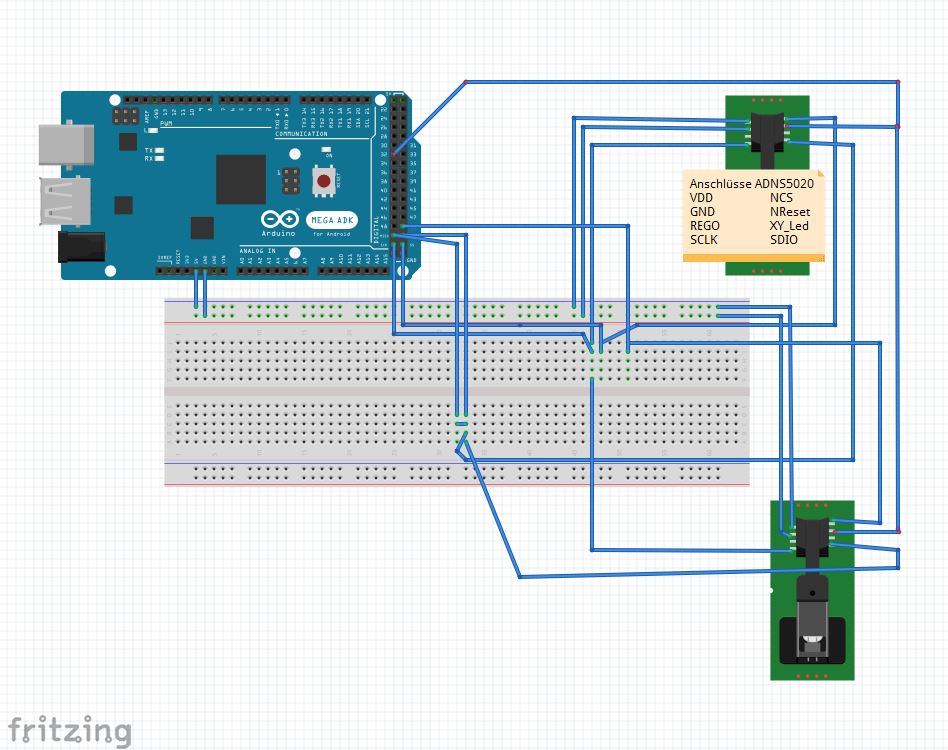
5 | #define SCLK 52 // Yellow
|
6 | #define SDIO 51 // Red
|
7 | #define NCS 53 // Yellow + tied
|
8 | #define NCS2 49
|
9 | #define NRESET 48 // Black
|
10 |
|
11 | #define REG_PRODUCT_ID 0x00
|
12 | #define REG_REVISION_ID 0x01
|
13 | #define REG_MOTION 0x02
|
14 | #define REG_DELTA_X 0x03
|
15 | #define REG_DELTA_Y 0x04
|
16 | #define REG_SQUAL 0x05
|
17 | #define REG_BURST_MODE 0x63
|
18 | #define REG_PIXEL_GRAB 0x0b
|
19 |
|
20 | #define FRAME_LENGTH 225
|
21 |
|
22 | byte frame[256];
|
23 |
|
24 | void setup() {
|
25 | Serial.begin(9600);
|
26 | lcd.begin(16,2);
|
27 | }
|
28 |
|
29 | void loop() {
|
30 |
|
31 | reset();
|
32 | byte productId = readRegister(REG_PRODUCT_ID);
|
33 | byte revisionId = readRegister(REG_REVISION_ID);
|
34 | Serial.println("Found productId ");
|
35 | Serial.print(productId, HEX);
|
36 | Serial.print(", rev. ");
|
37 | Serial.println(revisionId, HEX);
|
38 | dumpDelta();
|
39 | //dumpFrame();
|
40 | delay(900);
|
41 |
|
42 | reset2();
|
43 | byte productId1 = readRegister(REG_PRODUCT_ID);
|
44 | byte revisionId1 = readRegister(REG_REVISION_ID);
|
45 | Serial.println("Found productId ");
|
46 | Serial.print(productId1, HEX);
|
47 | Serial.print(", rev. ");
|
48 | Serial.println(revisionId1, HEX);
|
49 | dumpDelta1();
|
50 | //dumpFrame();
|
51 | lcd.clear();
|
52 | delay(900);
|
53 | }
|
54 |
|
55 |
|
56 | void dumpDelta() {
|
57 |
|
58 | char squal = readRegister(0x05);
|
59 | char motion = readRegister(REG_MOTION); // Freezes DX and DY until they are read or MOTION is read again.
|
60 | char dx = readRegister(REG_DELTA_X);
|
61 | char dy = readRegister(REG_DELTA_Y);
|
62 |
|
63 | String string1 = String(motion,BIN);
|
64 |
|
65 | Serial.println("Squal: " + String(squal,DEC));
|
66 | Serial.println("Motion: " + String(motion, BIN));
|
67 | Serial.println("dx: :" + String(dx, DEC));
|
68 | lcd.setCursor(0,0);
|
69 | lcd.print("dx:");
|
70 | lcd.setCursor(4,0);
|
71 | lcd.print(dx,DEC);
|
72 | lcd.setCursor(0,1);
|
73 | lcd.print("dy:");
|
74 | lcd.setCursor(4 ,1);
|
75 | lcd.print(dy,DEC);
|
76 | Serial.println("dy: :" + String(dy, DEC));
|
77 | Serial.println(" ");
|
78 |
|
79 | }
|
80 |
|
81 | void dumpDelta1() {
|
82 |
|
83 | char squal = readRegister(0x05);
|
84 | char motion = readRegister(REG_MOTION); // Freezes DX and DY until they are read or MOTION is read again.
|
85 | char dx = readRegister(REG_DELTA_X);
|
86 | char dy = readRegister(REG_DELTA_Y);
|
87 |
|
88 | String string1 = String(motion,BIN);
|
89 |
|
90 | Serial.println("Squal: " + String(squal,DEC));
|
91 | Serial.println("Motion: " + String(motion, BIN));
|
92 | Serial.println("dx: :" + String(dx, DEC));
|
93 | lcd.setCursor(9,0);
|
94 | lcd.print("dx:");
|
95 | lcd.setCursor(11,0);
|
96 | lcd.print(dx,DEC);
|
97 | lcd.setCursor(9,1);
|
98 | lcd.print("dy:");
|
99 | lcd.setCursor(11 ,1);
|
100 | lcd.print(dy,DEC);
|
101 | Serial.println("dy: :" + String(dy, DEC));
|
102 | Serial.println(" ");
|
103 |
|
104 | }
|
105 |
|
106 | void reset() {
|
107 | pinMode(SCLK, OUTPUT);
|
108 | pinMode(SDIO, INPUT);
|
109 | pinMode(NCS, OUTPUT);
|
110 | pinMode(NRESET, OUTPUT);
|
111 |
|
112 | digitalWrite(SCLK, LOW);
|
113 | digitalWrite(NCS, LOW);
|
114 | digitalWrite(NRESET, HIGH);
|
115 | delayMicroseconds(100);
|
116 |
|
117 | // Initiate chip reset
|
118 | digitalWrite(NRESET, LOW);
|
119 | pushByte(0xfa);
|
120 | pushByte(0x5a);
|
121 | digitalWrite(NRESET, HIGH);
|
122 |
|
123 | // Set 1000cpi resolution
|
124 | digitalWrite(NRESET, LOW);
|
125 | pushByte(0x0d);
|
126 | //pushByte(0x01); // 1000cpi
|
127 | pushByte(0x00); // 500cpi
|
128 | digitalWrite(NRESET, HIGH);
|
129 | }
|
130 |
|
131 | void reset2() {
|
132 | pinMode(SCLK, OUTPUT);
|
133 | pinMode(SDIO, INPUT);
|
134 | pinMode(NCS2, OUTPUT);
|
135 | pinMode(NRESET, OUTPUT);
|
136 |
|
137 | digitalWrite(SCLK, LOW);
|
138 | digitalWrite(NCS2, LOW);
|
139 | digitalWrite(NRESET, HIGH);
|
140 | delayMicroseconds(100);
|
141 |
|
142 | // Initiate chip reset
|
143 | digitalWrite(NRESET, LOW);
|
144 | pushByte(0xfa);
|
145 | pushByte(0x5a);
|
146 | digitalWrite(NRESET, HIGH);
|
147 |
|
148 | // Set 1000cpi resolution
|
149 | digitalWrite(NRESET, LOW);
|
150 | pushByte(0x0d);
|
151 | //pushByte(0x01); // 1000cpi
|
152 | pushByte(0x00); // 500cpi
|
153 | digitalWrite(NRESET, HIGH);
|
154 | }
|
155 |
|
156 |
|
157 |
|
158 | byte pullByte() {
|
159 | pinMode (SDIO, INPUT);
|
160 |
|
161 | delayMicroseconds(100); // tHOLD = 100us min.
|
162 |
|
163 | byte res = 0;
|
164 | for (byte i=128; i >0 ; i >>= 1) {
|
165 | digitalWrite (SCLK, LOW);
|
166 | res |= i * digitalRead (SDIO);
|
167 | delayMicroseconds(100);
|
168 | digitalWrite (SCLK, HIGH);
|
169 | }
|
170 |
|
171 | return res;
|
172 | }
|
173 |
|
174 | void pushByte(byte data){
|
175 | pinMode (SDIO, OUTPUT);
|
176 |
|
177 | delayMicroseconds(100); // tHOLD = 100us min.
|
178 |
|
179 | for (byte i=128; i >0 ; i >>= 1) {
|
180 | digitalWrite (SCLK, LOW);
|
181 | digitalWrite (SDIO, (data & i) != 0 ? HIGH : LOW);
|
182 | delayMicroseconds(100);
|
183 | digitalWrite (SCLK, HIGH);
|
184 |
|
185 | //Serial.print((data & i) != 0 ? HIGH : LOW, BIN);
|
186 | }
|
187 | //Serial.println("");
|
188 | }
|
189 |
|
190 | byte readRegister(byte address) {
|
191 | address &= 0x7F; // MSB indicates read mode: 0
|
192 |
|
193 | pushByte(address);
|
194 |
|
195 | byte data = pullByte();
|
196 |
|
197 | return data;
|
198 | }
|
199 |
|
200 | void writeRegister(byte address, byte data) {
|
201 | address |= 0x80; // MSB indicates write mode: 1
|
202 |
|
203 | pushByte(address);
|
204 |
|
205 | delayMicroseconds(100);
|
206 |
|
207 | pushByte(data);
|
208 |
|
209 | delayMicroseconds(100); // tSWW, tSWR = 100us min.
|
210 | }
|