Hallo zusammen Ich arbeite mit dem mcp2515. Der Baustein hat zwei Empfangsregister für die CAN-ID. Vor diese zwei Registern kann man maskierbare Filter schalten, die nur die Nachrichten durchlassen, die für den Baustein auch bestimmt sind. Soweit so gut. Nun habe ich meine Knoten aber so programmiert, dass man die IDs der Nachrichten verändern kann. D.h., es gibt eine Nachricht, die eine bestimmte ID auf einen anderen Wert umbenennt. Leider bedeutet das konsequenterweise auch, dass sich meine Filter mit jeder ID-Änderung auch ändern müssen. Deshalb möchte ich nun eine Routine schreiben, die mir die maskierbaren Filter so einstellt, dass eine möglichst große Übereinstimmung herauskommt. Beispiel für 4 Nachrichten und 2 Filter: ID Nachricht 1: 0b001100 ID Nachricht 2: 0b001101 ID Nachricht 3: 0b110110 ID Nachricht 4: 0b110010 => Filter 1: 0b0011xx => Filter 2: 0b110xxx Das wäre logischerweise die günstigste Kombination. Von Hand auch relativ leicht rauszufinden. Nur - wie kann man sowas am Besten in einer Routine automatisch berechnen? Alle IDs mit XOR verknüpfen und dann alle Abweichungen ausrechnen? Hat jemand von Euch sowas schon mal gemacht und weiß eine gute Lösung? Grüsse, Steffen P.s.: Spricht eigentlich etwas gegen eine Neuverteilung von IDs? Ich halte das für eine gute Idee, oder macht man sowas grundsätzlich nicht?
Schau Dir mal die folgende Seite an: http://www.vassfamily.net/ToyotaPrius/CAN/CAN232/index.html Dort gibts es Sourcecodes mit denen man Werte für das AMR und ACR eines SJA1000 berechnen kann. Entweder anhand von ID's die Registerwerte oder anhand des Registerwertes die ID's. Die Sourcecodes geben Dir vielleicht eine Grundlage. Die Codes hab ich auch als fertige EXE compiliert falls Du probieren möchtest. /Michael
Hallo Michael, super, das ist genau das, was ich gesucht habe! Danke Michael! Wie macht man das überhaupt in der Praxis? Nimmt man da auch veränderbare IDs? Oder legt man die nur einmal fest und behält sie dann? Denn so ganz trivial ist die Berechnung offensichtlich ja doch nicht. Der mcp hat auch noch, je nach Empfangsregister, neben der Maske nicht nur einen, sondern gleich 2 bzw. 4 Filter. Wenn ich da das Optimum finden möchte, brauche ich Unmengen an Code :-( Grüsse, Steffen
Der Sinn von ID's besteht wohl darin, das ein Frame eindeutig identifiziert werden kann, und somit auch der Inhalt der Daten. Eine geänderte ID macht vielleicht Sinn, wenn man den Dateninhalt von zwei Frames in einem neuen Frame zusammenfasst. Wenn Du das aus Sicht der Daten betrachtest müsste jede CAN Node mitplotten welche ID sich gerade auf eine neue geändert hat, damit die Node weis hinter welcher ID sich beim nächsten Transfer die Daten befinden. Vielleicht kannst Du mehr Details zu Deinem Vorhaben liefern damit man sich was darunter vorstellen kann was Du überhaupt machen willst. /Michael
Das System besteht aus ungefähr 30 Busknoten und vernetzt Sensor-Aktor in meinem, vorher CAN-Bus freien, Pkw. Das fängt an beim Innenlichtdimmer und endet bei der Ladedruckregelung. Das Ganze findet also in meinem Hobby Anwendung und ist (natürlich) nicht kommerziell. Die ID dient ja nicht nur zur Identifizierung, sondern legt ja auch die Priorität der Nachricht fest. Ich befürchte, dass ich mich jetzt auf Prioritäten festlege, die sich hinterher verschieben. Bei 30 Knoten vielleicht noch nicht so das Problem, aber eine gewisse Flexibilität ist doch generell nützlich. Weiterhin ging ich bisher davon aus, dass man das in der gängigen Praxis genauso löst. An die würde ich mich nämlich gerne halten. Naja, bis zur Berechnung der Masken/Filter war der Programmcode ja auch nicht schwer (IDs im EEPROM abspeichern, eine Nachricht ReadIDs, eine SetID). Aber wenn ich jetzt an jedem Knoten noch aufwändig die Filter berechnen muss, sieht das schon wieder anders aus... Grüsse, Steffen
Es macht vielleicht Sinn, sich dann an bestehenden Standards zu orientieren. zB. an der SAE J2178-2 diese Beschreibt zwar die J1850 Class B Netzwerke, aber dort ist die Aufteilung der Frames geregelt nach Systemen. Jedes System enthält wieder Sub-Systeme. Siehe Anhang. Für CAN Bus gibt es bestehende Specificationen die Du vielleicht anschauen solltest, die ISO11898,ISO14229,ISO15765 und ISO15031-5(noch nicht veröffentlicht) Was ich immer noch nicht verstanden habe warum sollen sich die ID's der Frames für ein und den selben Dateninhalt dynamisch ändern? Wenn Du schon ein solches Projekt anfängst, dann must Du dir vorher auch ein Konzept ausdenken das Beschreibt, welche Daten, mit welcher Priorität(somit ID) in welchem Zeitzyklus (oder azyklisch) gesendet werden sollen. Wie willst Du den Überblick behalten wenn sich dein Bustraffic ständig ändert. Wie willst Du den Traffic analysieren? Du brauchst ja dann ein PC Tool, das genau das selbe macht wie Deine Nodes, nämlich rauszufinden, welche Daten sich gerade hinter einer empfangenen ID verbergen. Als Beispiel (wenn ich dich richtig verstanden habe): Eine Node sendet die Motordrehzahl auf ID 112. Eine andere Node empfängt diese und setzt die Motordrehzahl auf ID 126 um. Wenn jetzt noch eine dritte Node die Motordrehzahl braucht, dann muss diese wohl wissen, das die sich entweder hinter 112 oder 126 verbirgt. Das macht überhaupt kein Sinn, wenn sich alle 30 Nodes auf dem selben Bus befinden. Sowas macht nur Sin wenn du zwischen zwei oder mehreren verschiedenen CAN's die Daten umsetzen must, zB. Motor-CAN und Cockpit-CAN, jeder mit anderer Geschwindigkeit. Aber auch dann wäre die ID Umsetzung nicht dynamisch sondern folgt einem vorgegebenen Schema, ähnlich einer Look-up Table. Und diese Umsetzung muss ja dann auch nur eine Node machen, und nicht jede. Freue mich auf mehr Details ;-) /Michael
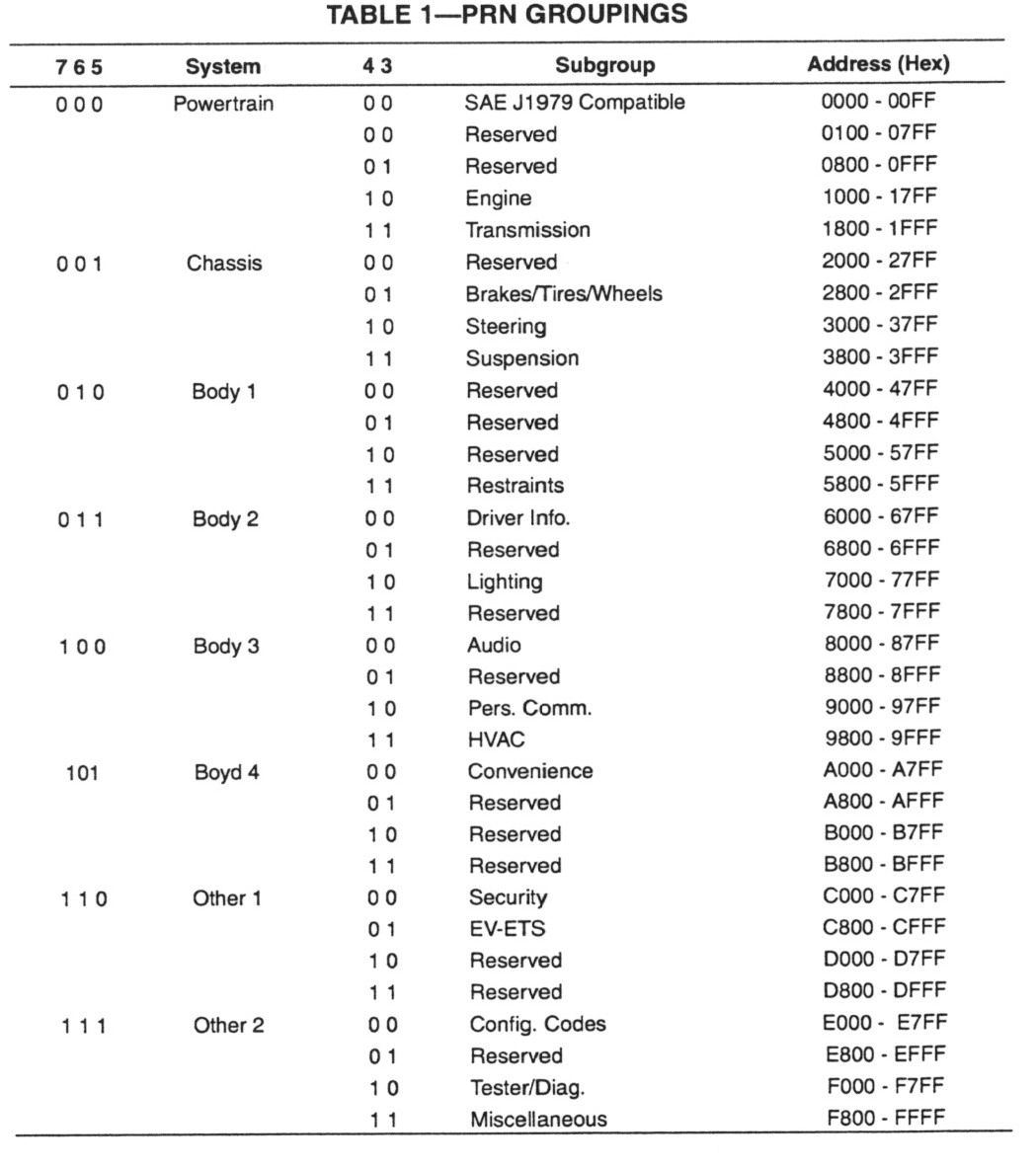
Perfekt! Das sind genau die Tipps, die mir gefehlt haben. Vielen Dank, Michael! Ich hab's bisher nur geschafft, die Informationen zu den Normen kurz zu überfliegen. Da werd ich mich am Wochenende genauer mit beschäftigen. Mit den "dynamischen" IDs hatte ich es übrigens anders gemeint: Angenommen ich habe einen Knoten zur Temperaturmessung entwickelt. Nun baue ich diesen Sensor als Geber für die Motortemperatur ein. Einige Wochen später möchte ich auch die Kühlwassertemperatur messen und bau den gleichen Sensor nochmal ein => Konflikt! Ausserdem hatte ich die Befürchtung, dass mir irgendwann die IDs mit hoher Priorität ausgehen und das System dann nicht mehr weiterentwickelbar ist. (Was mir selbst im Nachhinein bei der Anzahl möglicher IDs eher unwahrscheinlich vorkommt.) Meine Idee: Ich kann eine Broadcast-Nachricht über den Bus verschicken, die für alle Knoten gilt. Mit der benenne ich die alte ID des Knoten für die Motortemperatur um. Es bekommen alle Knoten diese Nachricht und alle Knoten übernehmen diese neue ID. Nun kann ich meinen neuen Knoten für die Kühlwassertemperatur anschliessen. Das Ganze dient also der "In-System" Konfiguration. Ich spare mir so die Liste, in der ich mir sonst für jeden Knoten die ID notieren müsste. Ich habe eine Frage zu Deiner angehängten SAE Norm: Ist die auf CAN gemünzt? Die IDs sind 21stellig...
Das heist, eine ID Änderung würde nur dann stattfinden wenn sich etwas am Gesamtsystem ändert. Aber selbst sowas läst sich einfacher lösen als mit aufwendigen Filterberechnungen. Du könntest zB. Jumper/DIP-Schalter in Deiner Hardware nutzen, mit der sich eine ID Range leicht von aussen ändern läst, ohne umzuprogrammieren. Aber vorrausschauend könntest Du auch eine 29bit ID aufteilen in Bitgruppen, mit deren Hilfe sich das System, Subsystem, Knotentyp, Datentyp usw. klassifizieren läst. Das Dir die ID's ausgehen halte ich auch für sehr unwahrscheinlich, zumal Du pro CAN Frame 8 Byte Daten senden kannst. Ein Datenwert wird aber wohl niemals alle 8 Bytes belegen. Du kannst also mehrere Datenwerte in einer ID übertragen. Als 8bit, 16bit oder 32bit Wert, je nachdem welche Auflösung Du brauchst. Auch hier kann ich Dir nur empfehlen bestehende Standards anzuschauen. Das eben beschriebene Verfachen wird in SAE J2178-2 behandelt. >>Ich spare mir so die Liste, in der ich mir sonst für jeden Knoten die ID notieren müsste. Wohl kaum, wie willst Du den Überblick behalten ohne Dokumentation? Auch muss jeder Knoten der Daten empfängt und verarbeitet eine Liste gespeichert haben, wo drin steht hinter welcher ID sich die Daten verbergen. Der Unterschied ist nur die Art der ID Änderung bei einer Systemmodifikation. >>Ich habe eine Frage zu Deiner angehängten SAE Norm: Ist die auf CAN gemünzt? Nein, wie in vohergehenden Post schon angemerkt ist/sind die SAE Spec für SAE J1850 Bussysteme, wie sie zB. in Chrysler Fahrzeugen verwendet werden (ab 2006 auch durch CAN ersetzt). /Michael
Je länger wir über diese ID-Geschichte reden, desto ungünstiger erscheint sie mir auch. Von Jumpern halte ich zwar nicht viel, besonders bei kleinen Sensoren (große Bauform, benötigt I/O). Aber die kann ich ja durch einen Wert im EEPROM ersetzen. Ok, dann schaue ich mir heute Abend die von Dir geposteten ISO Normen und die SAE J2178-2 an. Leider ist das Thema für mich noch relativ unbekannt, in seinem Hobby interessiert einen ja meist mehr die technische als die organisatorische Seite. Allerdings, so ganz neu ist es mir auch wieder nicht (ich erinnere mich an einige langweilige(?) Vorlesungen dazu). Danke! Damit hast Du mir ein ordentliches Stück weitergeholfen, Michael! Steffen
Warum verpasst du deinen CAN-Knoten nicht eine eindeutige Nummer (so wie
die MAC-Adresse beim Ethernet oder die Chip-ID beim 1-Wire)?
Dann könntest du über einen Broadcast ("ID-Set-Message") über die
Datenbytes einem Knoten im laufenden Betrieb seine ID zuweisen.
Die "MAC-Adresse" könnte man beim Flashen entweder ins EEPROM oder
mit ins FLASH schreiben; sie sollte einfach nur einmalig vorhanden
sein.
Ansosnten sollte man sich schon einig sein, welcher Sensor/Aktor welche
Priorität bekommt.
>>in seinem Hobby interessiert einen ja meist mehr die technische als die >>organisatorische Seite. Mag sein, aber bei Deinem Vorhaben wirst Du ohne vernünftige Dokumentation nicht auskommen. Das wird Dir besonderst dann auffallen, wenn Du über einen längeren Zeitraum dich nicht damit beschäftigt hast und wieder etwas dran machen willst. /Michael
@Rahul: Es geht weniger um eine ID des Knotens. CAN ist ja nachrichtenorientiert, also die ID gibt keinen Absender an (höchstens implizit), sondern wovon die Nachricht handelt. Damit sendet ein Knoten nicht nur eine ID, sondern soviele, wie er Nachrichten erzeugt. Ausserdem ist das Problem, dass nicht nur der sendende Knoten die ID der Nachricht ändern muss, sondern auch alle empfangenden. Und mit dieser Situation bin ich dann bei meiner ursprünglichen Frage angelangt... Meintest Du das so? (Sorry, kenne mich mit Ethernet-Protokollen nicht sonderlich aus.) Inzwischen sehe ich auch keinen richtigen Sinn mehr, die IDs variabel zu machen. Erst Recht nicht, wenn sowas schon standardisiert wurde. Und mit der Aufteilung in Gruppen und Untergruppen bekommt die Sache ja auch eine klare Struktur... Viele Grüsse, Steffen
>> CAN ist ja nachrichtenorientiert, also die ID gibt keinen Absender an
(höchstens implizit), sondern wovon die Nachricht handelt.
Das ist interessant. Bis jetzt war ich ja der Meinung, CAN definiert
bestenfalls den physikalischen Layer. Das Protokoll, dass du dann
darauf implementierst, ist ja wohl absolut deine Sache.
In meinem Protokoll hat z.B. jeder Knoten seine eigene AbsenderID(8bit)
in die Extended CAN-ID codiert.
Des weiteren entscheidet dein Protokoll, ob es Nachrichten oder
Adressenorientiert arbeitet.
BTW, in meinem Netz benutze ich weder Filter noch Masken, der Knoten
(also die SW des Knotens) entscheidet selber, ob er die Nachricht
gebrauchen kann. Da die Zuordnung frei wählbar ist, hält der Knoten
eine Liste von (Sub)IDs, die sich dynamisch ändern kann.
Gruß,
Matthias
Hallo Matthias, wie ich schon oben schrieb: ich kenne mich wenig mit organisatorischen Dingen aus. Trotzdem: auch wenn CAN nur den physikalischen Layer definiert, ist es trotzdem nachrichtenorientiert. Was man in einer Schicht darüber daraus macht, ist natürlich eine andere Sache. Da überlasse ich aber Dir das Feld. Wenn Dein Knoten alle Nachrichten empfängt, hast Du natürlich massig Traffic zu verarbeiten. Wieso benutzt Du keine Filter?
@Steffen Hausinger: Ja ja, ich weiß, CAN Bus soll ja eigentlich für viele ein Hobby sein!!! Und da ist es auch eine sehr sehr feine Sache !!! Zur Zeit staune ich aber nur noch darüber, wie manche Menschen aus einfachen Dingen gerne was noch komplizierteres machen möchten. Der CAN-Bus ansich ist doch schon kompliziert genug, oder? Warum ist eine dynamische Identifier-Generierung notwendig? Dynamische ID-Vergaben gibt es bei CANopen, aber das ist dann auch streng organisiert, und für standardisierte Industrie-Anwendungen in der Automatisierungstechnik. Kannst du dann auch mit einem CAN Analyzer Tool noch Statistiken aufzeichnen bzw. verwerten? Eher nicht. Ist die Strategie immer zuverlässig? Allgemein, stellt man die Akzeptanzfilter eines Knotens so ein, daß er nur Nachrichten empfangen darf, die er auch empfangen soll. Das macht ein- und die selbe Software für verschiedene Knoten und ist kein Problem, habe ich beim Philips LPC2129 so gemacht: Eine Baugruppe mit einem Steckplatz in einem Racksystem, in dem der Steckplatz mit ein paar Pins auf der Backplane binär kodiert ist und die Steckplatznummer darstellt, die so in den Identifier eingeht? Die Steckplatznummer wird per Software gelesen, und danach die Akzeptanzfilter eingestellt. Weiter, stellt man diese Knoten so ein, daß sie nur Identifier senden, die kein sonstiger Knoten mehr senden darf. Dann ist man schon im grünen Bereich. Das ist das interessante am CAN Bus: Man kann dort wegen der Strategie einen Knoten hinzufügen oder wegnehmen, ohne den anderen zu schaden. Über das Identifier Vergabeschema sollte man sich vorher einen genauen Plan machen (Lastenheft, Pflichtenheft): Normale Messages erhalten einen mittleren Identifier (etwa ab 0x200), Fehlermessages einen sehr kleinen (ab 0x000, meist wichtig), weniger wichtige Messages einen höheren (vielleicht ab 0x400), o.ä.. Das muß nicht zwangsläufig einer Norm entsprechen. Mit dem Identifier wird es zudem komplizierter, wenn dieser durch Bitgruppen wie z.B. Line-Nummer, Gruppe, Stern, durch ein komplizierteres Leitungssystem nach der Leitungstopologie kodiert bzw. bestimmt wird. Ansonsten: Den Möglichkeiten der Nutzung von ID, Hierarchien und Datensätzen, sind beim CAN-Bus grundsätzlich keine Grenzen gesetzt: Die sind unendlich. Wer nur gerne einen Audio-Stream life über den CAN-Bus übertragen möchte: Bitte, gerne, mit 1 Mbit/s gut denkbar. Eine ältere Auswertestruktur ist die so genannte Multiplexed ID, indem man z.B. das Byte 0 des Datenfeldes noch als erweiterten Identifier zur Auswertung heranzieht. Literatur und Sourcen: Für Philips LPC 2000 Serien (ARM7) gibt es hier CAN Beispielsoftware: http://www.keil.com/download/docs/291.asp Buchvorschläge: Horst Engels: CAN-Bus Franzis Verlag ISBN 3-7723-5146-8 Wolfhard Lawrenz: CAN Controller Area Network Hüthig Verlag ISBN 3-7785-2780-0 Gruß Dietmar
>>Wenn Dein Knoten alle Nachrichten empfängt, hast Du natürlich massig
Traffic zu verarbeiten. Wieso benutzt Du keine Filter?
Weil mein Protokoll sowohl Event- als auch Adressorientiert arbeitet.
Und Events können potentiell jeden interessieren. Der Knoten ist dazu
da, Traffic zu verarbeiten, das ist schon ok so. Theoretisch müßte ich
die Filter auch recht aufwendig berechnen, wollte ich welche verwenden,
aber ich sehe keinen Sinn darin. Der Knoten verarbeitet die Events
anhand von Listen, und gut ist. Dazu herrscht auf meinem Bus auch nicht
viel Traffic, da Hausbus...
Gruß,
Matthias
Ja, inzwischen bin ich ja davon schon ab, die IDs dynamisch zu verteilen. Michael hatte mich doch schon überzeugt. Nur, ich sitze hier an meinem Schreibtisch, denk mir irgendwelche Aufgaben aus und programmiere sie dann. Von den ganzen Normen weiß ich nichts und ein Lasten- oder Pflichtenheft mache ich mir auch nicht. Und ohne diese Vorgedanken kommt es häufig vor, dass man im Nachhinein etwas ändern muss. Aus dieser Situation entstand die Idee mit den dynamischen IDs und - ehrlich gesagt - nahm ich auch an, dass man in der Praxis es auch so macht. Schließlich wird doch sonst auch kaum etwas konstant und unveränderbar gelassen. Jetzt, im Nachhinein, bin ich froh hier Tipps von Euch zu bekommen. Und mit einer klaren Struktur bei den IDs lebt es sich garantiert einfacher. Darüber war ich im vorher gar nicht mal im Klaren. Danke für Deine Tipps und die Literaturvorschläge (die Bücher sind ja sogar auf deutsch!). Steffen
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.