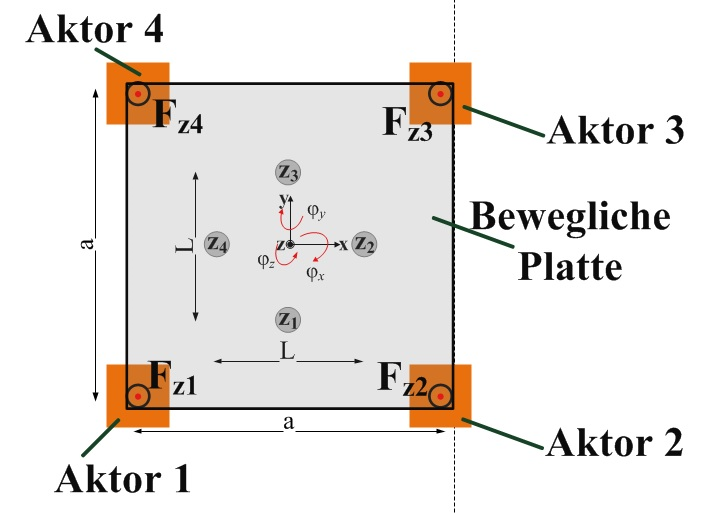
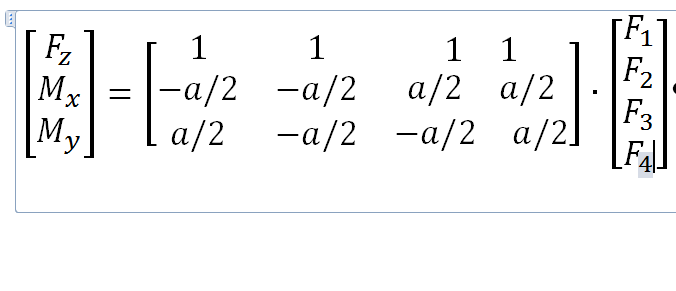
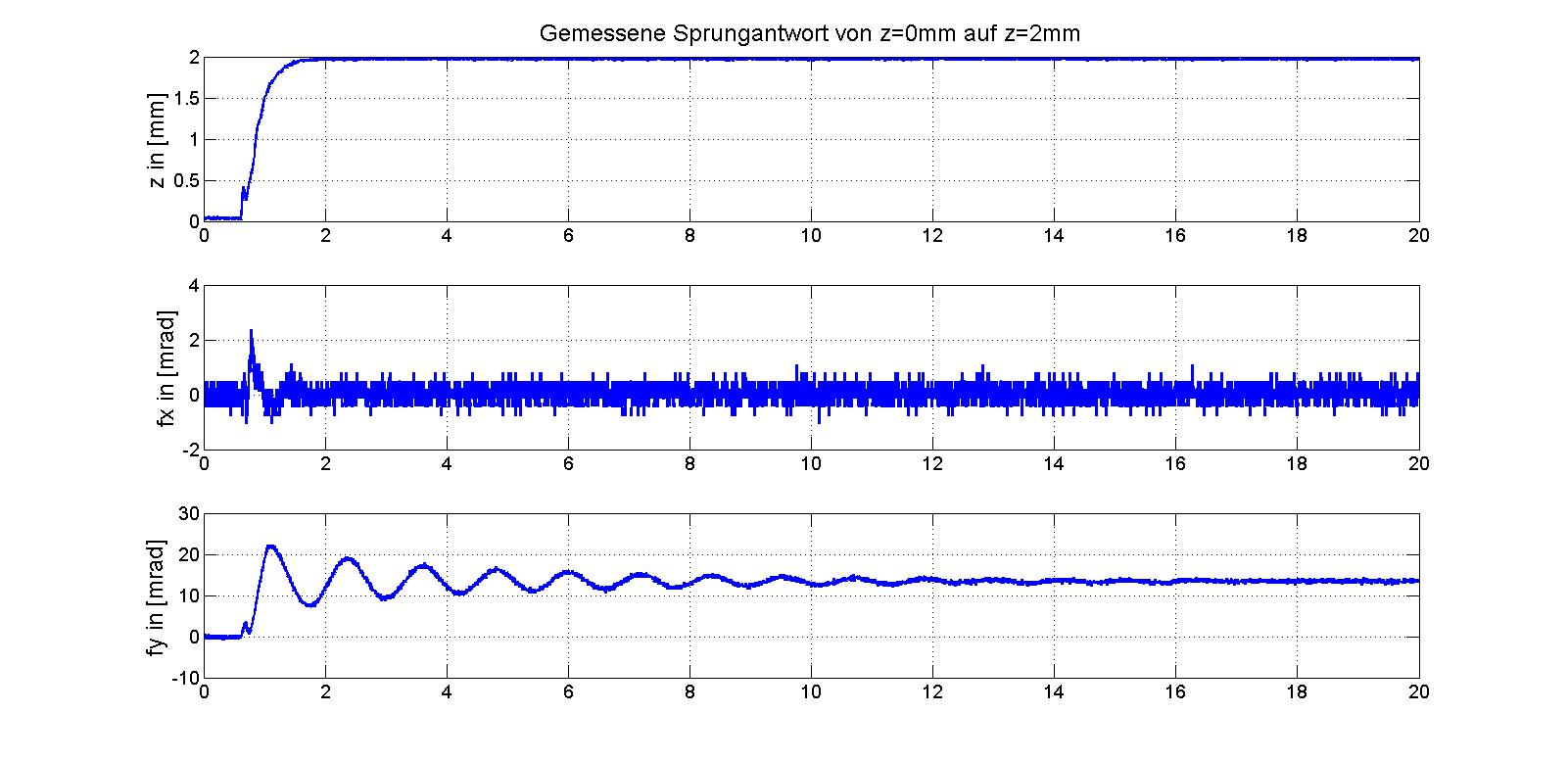
Liebe Leute, nach langem Probieren und recherchieren find ich einfach keine Lösung. Für eine Projektarbeit arbeite ich an ein einfaches Hexapod, welche eine Platte entlang der z-Achse bewegen soll, sowie kleine Bewegungen um die x- und y-Achse. Ziel ist es, eine Positionsregelung für mein Betreuer zu realiseren, die die Platte entlang der drei Koordinaten z, fx und fy positioniert. Das System besteht aus 4 Aktoren, die lediglich eine Kraft nur in z-Richtung erzeugen. Weiterhin verwende ich 4 z-Sensoren, die entsprechend der Anordnung eingebaut sind. Die Regelung habe ich wie folgt realisiert: Ich lese die vier Werte (gemessene Höhen) der z-Sensoren ein, und berechne damit die absolute Höhe z=1/4 * (z1 + z2 + z3 + z4) sowie die Drehung um x fx=1/L * (z3 - z1) und die Drehung um y fy=1/L * (z4 - z2). Diese drei Werte vergleiche ich mit den vorgegebenen Sollwerten, in dem Fall zSoll=2mm sowie fxSoll=fySoll=0 rad. Die Regeldifferenz werden drei einzelne PIDT1-Regler für z, fx und fy zugeführt. Die Stellgrößen der Regler entsprechen globale Kräfte und Momente (Fz, Mx, My), die entsprechend dann in die einzelnen Aktoren rücktransformiert werden. In dem Fall gilt: Aktor1: 0.25*Fz - 1/(2*a)*Mx + 1/(2*a)*My Aktor2: 0.25*Fz - 1/(2*a)*Mx - 1/(2*a)*My Aktor3: 0.25*Fz + 1/(2*a)*Mx - 1/(2*a)*My Aktor4: 0.25*Fz + 1/(2*a)*Mx + 1/(2*a)*My Diese Gleichungen können abgeleitet werden aus der Matrix, wie mit den einzelnen Aktoren die globalen Kräfte realisert werden (siehe Bild). Dabei handelt es sich um eine Pseudoinverse, die mit Mathematica berechnet worden ist. Auf jeden Fall zu dem Ergebniss: 2 der 3 Regler funktionieren sehr gut. D.h. der Sollwert für z als auch für fx wird erreicht, auch bei Eingriff von Störgrößen, nur tut der dritte Regler für fy gar nichts (siehe Bild). Immerhin konnte ich ermitteln, dass der dritte Regler direkt sättigt und daher nichts tut. Nur warum der in die Übersteuerung kommt, ist mir ein Rätsel. Aufgrund der Symmetrie müssten die Regler für fx unf fy ja identisch sein, jedoch funktioniert nut der für fx. Die Aktoren selber können noch mit weiterer Leistung beaufschlagt werden, von daher ist mir die Übersteuerung wirklich ein Rätsel. Woran kann das liegen, dass der Regler nicht funktioniert? Habe so viel ausprobiert, aber bis dato noch keine Lösung gefunden. Die Parameter für den Regler fx entsprechen den selben wie für fy, da ja wie gesagt beides symmetrisch ist. Kann mir einer weiterhelfen?
Angehängte Dateien:
-

AnordnungDraufsicht.png
110 KB -

Matrix.png
4,4 KB -

SprungMessung.jpg
130 KB
Ein Hexapod ist ueberdefiniert. Da ist nichts mit einfach regeln. Das verklemmt sich. Das muss praezise mit viel Mathematik angesteuert werden. Um das Verklemmen etwas zu besaenftigen, wuerd ich jeden Aktor mit Gummi unterlegen. Alternativ koennte man die Kraefte messen. Allenfalls hab's aber auch falsch verstanden. Bring mal eine 3D skizze.
Schon richtig verstanden. Kann mir hier keiner weiter helfen?
Was ist falsch oder ungenuegend an : Mathematik, Steuern, und Kraefte messen. Regeln geht da nicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.