{kind=link}
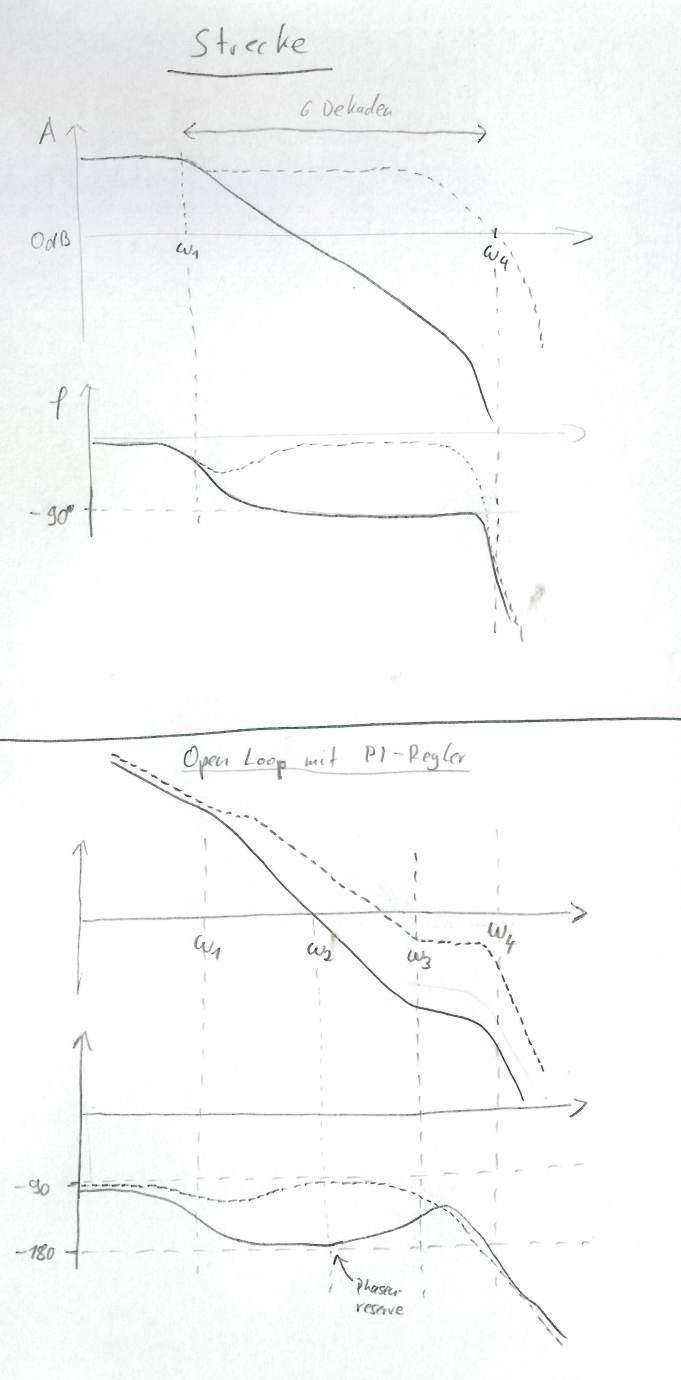
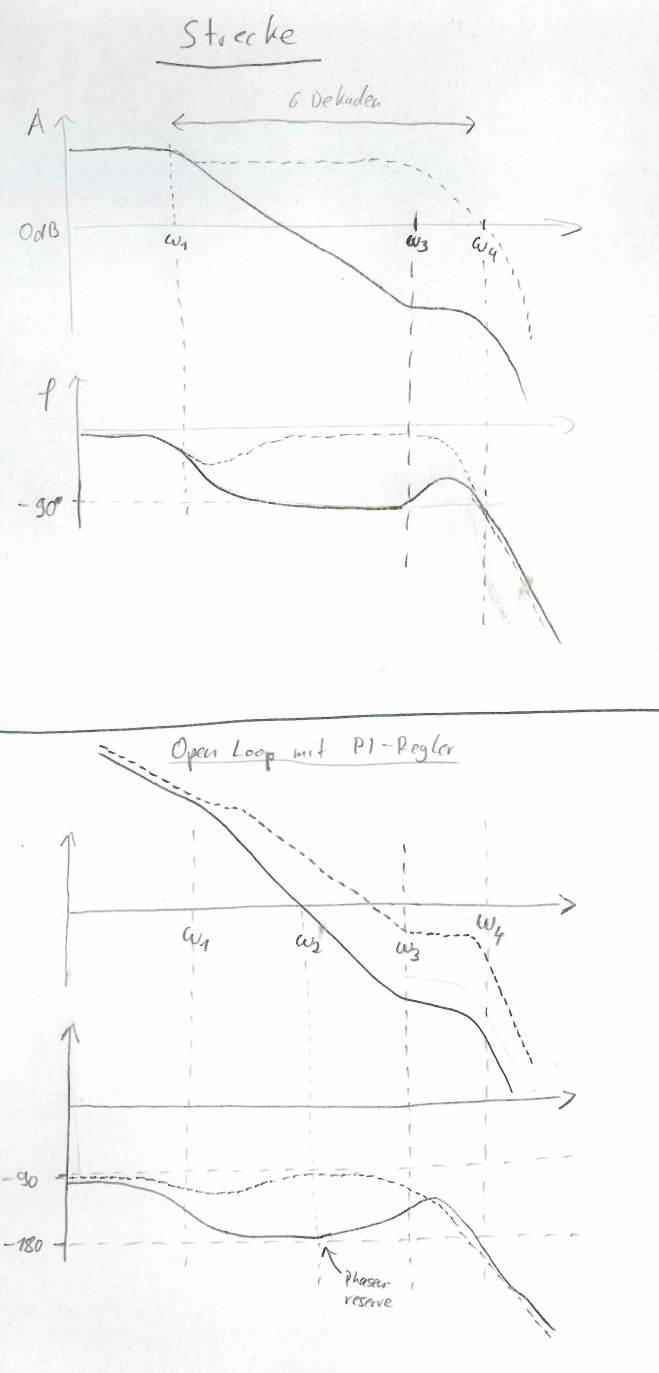
Hallo Leute, bisher habe ich Regelungen immer nach dem Bode-Kriterium mit der Phasenreserve des offenen Regelkreises beim Durchqueren der 0dB-Schranke des Amplitudenganges ausgelegt. Ich bin jetzt kein Regelungs-Experte, aber das hat immer so funktioniert. Jetzt hab ich ein Problem bei dem ich nicht durchblicke. Gegeben: Eine (langsam) zeitlich veränderlich Strecke die sich zwischen folgenden Extremwerten befinden kann: Fall 1 (durchgehende Linie im Diagramm oben): Die Strecke ist im wesentlichen Frequenzbereich ein Integrator (I-Anteil). Leider mit einem Offset, so dass ein Eingangwert von 1..10V erforderlich ist damit der Ausgang konstant bleibt. Das ist auch noch (langsam) zeitlich veränderlich. Diesen Eingangswert der Strecke um den Ausgang konstant zu halten muss der Regler selber raus finden und auch nachregeln (ist über die Temperatur veränderlich, Zeitkonstante ein paar Minuten) Unterhalb Omega-1 geht die Strecke in eine P-Strecke über, aber diese Frequenz ist so niedrig dass sie für die gewünschte Reglergeschwindigkeit (Ausregeln von Störungen, etc.) nicht wirklich relevant ist. Bei Omega-3 ist eine Nullstelle. Konkreter kann ich leider nicht werden, ist was kommerzielles. Fall 2: (gestrichelte Linie im Diagramm oben): Die Strecke verändert sich auf solche Art und Weise dass es sich im wesentlichen um eine P-Strecke handelt . Mit recht hoher Verstärkung. Das beschränkt den P-Anteil eines Reglers nach oben, damit es nicht schwingt. (Die Nullstelle der Stecke im Fall 1 ist fast auf die Frequenz von omega-1 runter gerutscht) Bei Omega-4 befinden sich weitere Pole, das ist die obere Grenze bei der sinnvollen Simulation, dort muss die offene Schleife auf jeden Fall schon eine Verstärkung unter 1 haben. Zwischen Omega-1 und Omega-4 liegen ca. 6 Dekaden. Die gewünschten Zeitkonstanten der Ausregel-Geschwindigkeit befinden sich ca. 2-3 Dekaden oberhalb von Omega-1 und 2 Dekaden unterhalb von Omega-4. Bei Fall 1 hat die Strecke einen I-Anteil. Also sagt die Regel dass der Regler keinen I-Anteil haben darf. Aber: Die Strecke hat einen Offset, d.h. braucht einen bestimmten Wert am Eingang (größer als Null) um einen konstanten Ausgangswert zu haben. Damit ergibt sich bei einem P oder PT1 Regler eine bleibende Regelabweichung weit größer als die erlaubte Regelabweichung. Im Fall 2 ist die Verstärkung der Strecke recht hoch, zusammen mit dem erlaubten Rauschen (bzw. rumhüpfen) am Regler-Ausgang bei gegebenen Rauschen der Messwerte ergibt sich eine obere Grenze des P-Anteils des Reglers. Also versuch mit PI-Regler (bisher alles nur mit Simulink simuliert, Messungen gibt’s erst wenn die Theorie des simulierten Reglers den Projektleiter überzeugt) Im Bild unten ein PI-Regler der in der Simulation solala funktioniert: Fall 2 ist gut, Fall 1 schwingt bei Störungen lange nach, die Dämpfung ist gering. PI-Regler wurde so designt: P-Anteil so weit aufgedreht bis das Messwert-Rauschen gerade noch zulässiges Rumhüpfen des Regler-Ausgangs im Ausgeregelten zustand zulässt (das ist die obere Grenze, bis zur Schwingneigung könnte man sonst noch weiter aufdrehen) Dann wird der I-Anteil so weit aufgedreht dass es im Fall 1 noch nicht schwingt. Beim Regler so wie er jetzt ist liegt die Nullstelle des PI-Reglers ungefähr bei Omega-3 (siehe Diagramm unten). Im Fall 1 liegt der Durchtritt der Amplitude durch die 0dB-Grenze bei Omega-2. Dort liegt die Phase des offenen Kreises bei fast -180° (nur durch den Pol der Strecke bei Omega-1 die Null der Strecke bei Omega-3 und der Null des Reglers bei Omega-3 gibt es zumindest ein bisschen Phasenreserve) Durch die Kombination des I-Anteils der Strecke und dem vom Regler geht die Phase des offenen Kreises auf (fast) -180° Den I-Anteil kann ich leider nicht reduzieren weil die Ausregelung der thermischen Drift der Strecke im Fall 1 sonst zu langsam wird. Die Regelung ist im Fall 1 aber sehr schwach gedämpft und schwingt lange nach. Den P-Anteil kann ich nicht erhöhen (um Omega-3 zu reduzieren und die Phasenreserve bei Omega-2 zu erhöhen) weil sonst das Messwert-Rauschen zu sehr auf den Reglerausgang durch schlägt. Irgendwelche Versuche mit einem D-Anteil eine weitere Nullstelle des Reglers in die Nähe von Omega-1 zu bringen um die Phase des offenen Kreises nicht so schnell auf -180° sinken zu lassen haben überhaupt nicht funktioniert, auch wenn die Null durch den D-Anteil eine Dekade höher wieder durch einen Pol kompensiert wurde. Das durchschlagen des Messrauschens auf den Ausgang war noch viel Schlimmer. Die Strecke schwankt langsam zwischen den beiden Extremwerten, aber so langsam dass es sich nicht auf die Reglerdynamik auswirkt. (Zeitkonstante so ähnlich wie Omega-1) Ich bin mit meinem Regler-Latein am Ende. Was könnte man in so einem Fall tun? Der Regler soll in einen Mikrocontroller kommen, ich bin also nicht auf PID beschränkt, simuliert wird mit Simulink.
Angehängte Dateien:
-

180904_regler.jpg
43 KB
{kind=link}
Du bist ja ein Scherzkeks... Da ist wirklich nichts an Substanz, was meine Neugierde wecken würde. Soll ich hier deine komerziellen Projekte für dich lösen? Mache ich gerne, meine Stundensatzt ist 75 Euro. Du kannst mir ein Email zukommen lassen :-) Aus den Diagrammen sehe ich aber kein schwierig zu lösendes Problem. Beide Fälle lassen sich durch eine Integrator gut lösen. Nachdem die Schleifenverstärkung auf < 1 abgefallen ist, muss der Integrator in ein P übergehen. Also eine C-R Kombination im Rückkoppelpfad des Opamps. Grüße, Udo
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.