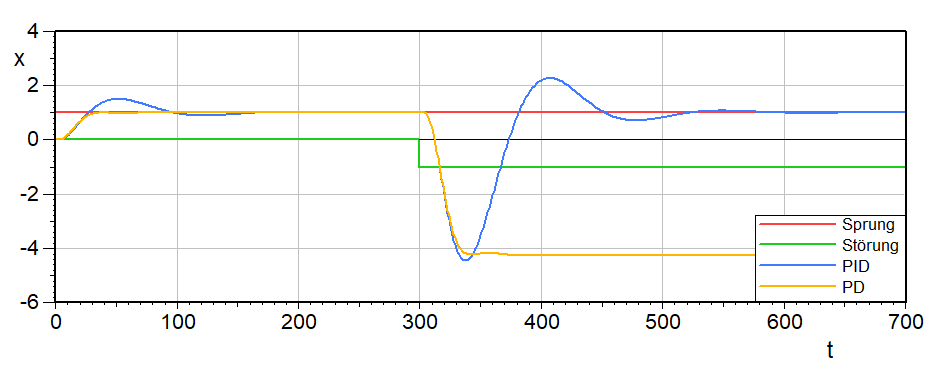
Hallo zusammen, Für eine RGT-Aufgabe sollte ich für eine PT4-Strecke mit I-Glied einen Regler mit Dämpfungsvorgabe entwerfen. Unterschieden wird hier der PID und PD-Regler. Ich hab den PD nach Betragspotimum und den PID nach symmetrischen Optimum ausgelegt. Hab beide Systemantworten aufgezeichnet und festgestellt, dass der PD-Regler keine Störungen ausregeln kann. Hätte eher gedacht, dass der PID Probleme macht weil er ja mit dem zusätzlichen I-Glied schon bei einer Phase von -180° landet. Wie kann man das schlechte Störverhalten und das gute Führungsverhalten des PD-Reglers erklären?
Angehängte Dateien:
-

Systemantworten.png
5,1 KB
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.