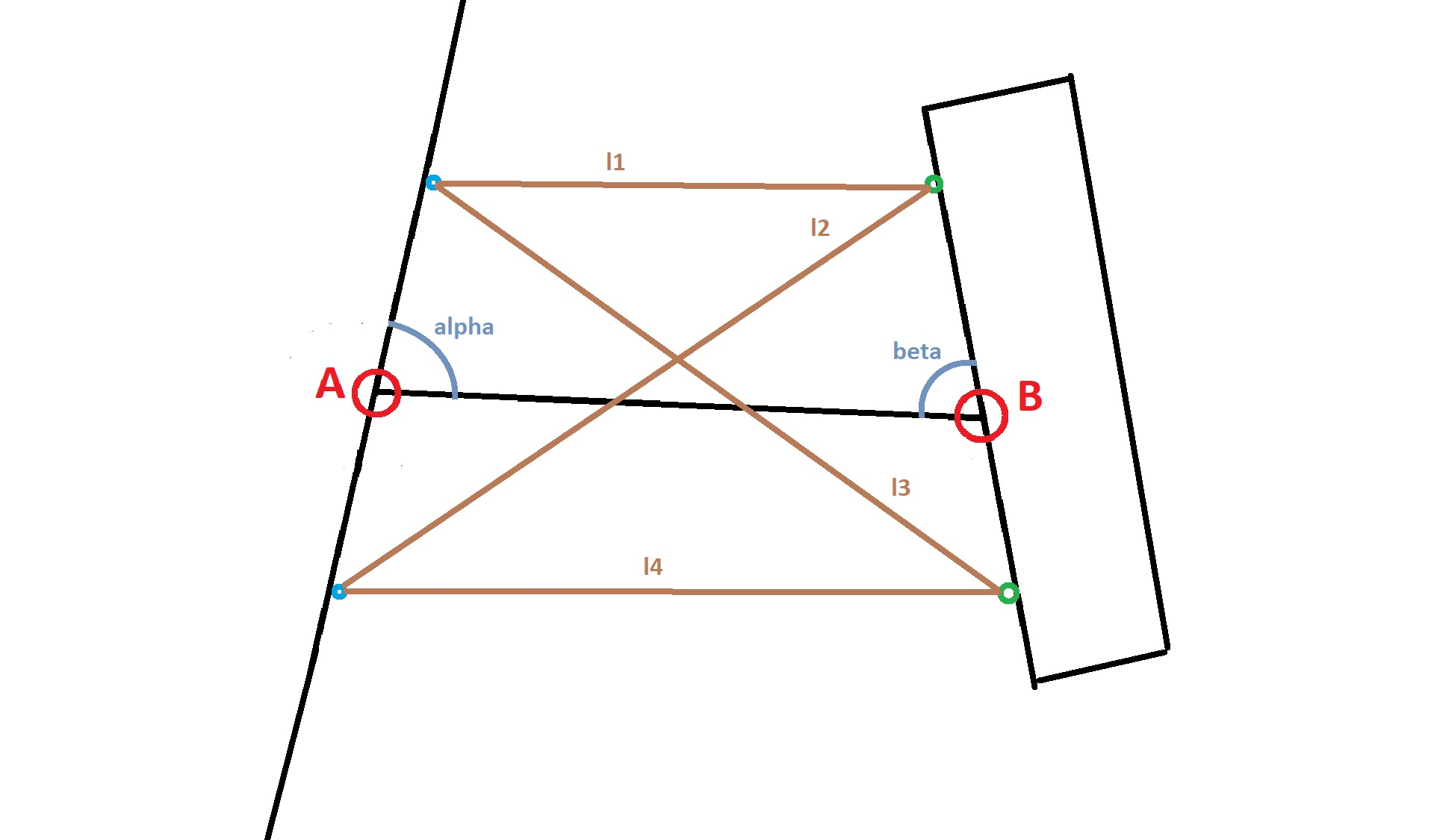
Hallo liebe Forenmitglieder, ich bin schon seit geraumer Zeit auf der Suche nach einer Lösungsmöglichkeit für mein Problem. Ich will es euch ganz kurz mit Hilfe meiner Skizze (ich hoffe man kann alles erkennen) erläutern: Also die fast senkrechte Linie bei Punkt A steht fest. Die Punkte A und B sind Gelenke, die sich bewegen lassen können, sodass die senkrechte Linie bei Punkt B fast frei beweglich ist und eigentlich jede erdenkliche Position annehmen kann. Am Ende wollte ich die beiden Winkel alpha und beta als Ausgangsgröße erhalten. Mit Winkelsensoren zu arbeiten macht hier keinen Sinn, da die Punkte A und B nicht gelagert sind und zu viel Spiel für einen derartigen Sensor haben. Was ich mir jetzt überlegt habe ist, dass ich an den grünen Punkten auf der rechten Seite zwei Sender installiere, die ein Signal ausstrahlen, welches ich mit den blauen Empfängern auf der linken Seite empfangen will und über die "Flugzeit" die Entfernungen l1-l4 berechnen kann. Mit diesen ist es dann möglich die Winkel zu berechnen, weil die Abstände der Sender und der Empfänger jeweils zueinander konstant sind. Versucht habe ich es vorher mit einem Lidar Scanner, mit dem ich aber nur den Gesamtwinkel zwischen den beiden Objeten berechnen konnte und nicht die beiden einzelnen Winkel. Des Weiteren wollte ich einen Ultraschallsensor zweiteilen, wobei die Sendereinheit und die Empfängereinheit getrennt sind. Das Signal der Sender, die ich im Internet gefunden hatte ist aber zu gerichtet, sodass auch die Nutzung mehrerer unterschiedlich ausgerichteter Sender an einer Sendestelle nicht möglich ist. Am besten wäre hier vielleicht eine punktförmige Ultraschallquelle, die allseitig eine Wellenfront losschickt, wobei ich aber nach längerer Recherche feststellen musste, dass es sowas nicht zu kaufen gibt. Gedacht hatte ich auch daran einen Lidar Sensor zweizuteilen, und anstatt des gerichteten Lasers eine allseitig leuchtende LED einzusetzen, was aber wegen der Ansprechverzögerung dieser eigentlich unmöglich erscheint, da die gemessenen Flugzeiten viel zu klein sind. Jetzt hoffe ich, dass vielleicht einer von euch eine Idee für mein Problem hat, egal ob Verbesserungsvorschläge der oben genannten oder ganz neue Ideen. Schonmal vielen Dank im Voraus an alle. Grüße Markus.
Angehängte Dateien:
-

Skizze.png
220 KB
Kannst du die "nicht gelagerten Gelenke" an den Punkten A und B etwas genauer beschreiben? Vielleicht gibt es ja doch eine mechanische Lösung. Ich denke da an eine lange biegsame Welle, die den Drehwinkel an einen Winkelsensor überträgt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.