Hallo Forum,
es geht um eine Aufgabe aus dem Bereich Prädiktion mit einem
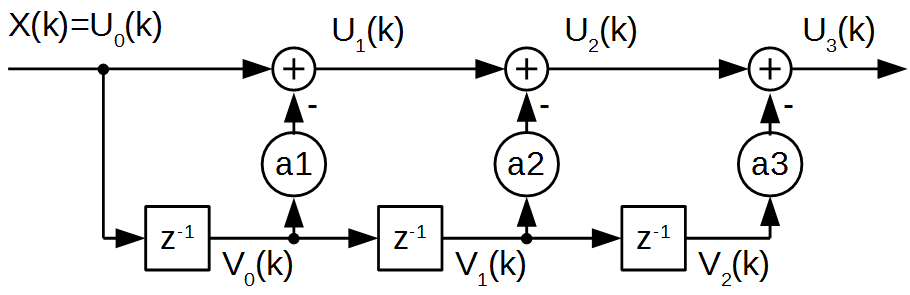
transversalen Filter (siehe Bild), bei der ich nicht mehr weiter weiß.
Es geht darum , diese Filterkoeffizienten adaptiv auf
"Sample-by-Sample"-Update auszulegen. Die Koeffizienten sollen
unabhängig von den anderen Stufen berechnet werden. Instabilitäten
sollen, wo immer möglich, vermieden werden.
Was ich bisher habe sind die folgenden Gleichungen (keine Kunst):
Schleife Beginn
U1(k) = U0(k) - V0(k) * w1k
U2(k) = U1(k) - V1(k) * w2k
U3(k) = U2(k) - V2(k) * w3k
// Verzögerte Spannungen speichern
V2(k+1) = V1(k)
V1(k+1) = V0(k)
V0(k+1) = U0(k)
Bei der folgenden Gleichung, die für die Prädiktion benutzt wird,
fehlt mir leider das Verständnis.
w1k(k+1) = w1k(k) + 2 mü epsilon(k) * Xi(k);
(Was oder wo ist epsilon (Fehler) und was ist Xi?)
Schleife Ende
Kann mir hier jemand helfen, der sich mit diesen Prädiktoren auskennt?
Eine Lösung ansich ist nicht nötig, ich möchte es nur verstehen, um dann
selbst die Lösung zu finden.
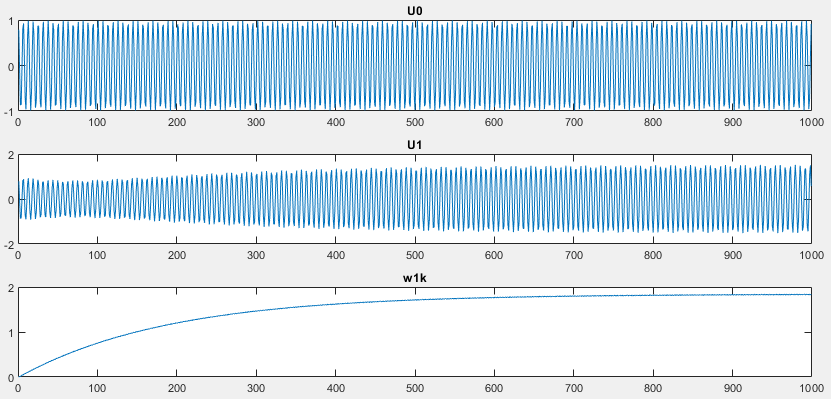
Bei einer einzelnen Stufe (Matlab) sieht es so bei mir aus:
for i = 2:ende %U0_samples-1
U1(i) = U0(i) - V0(i) * w1k(i);
V0(i+1) = U0(i);
w1k(i+1) = w1k(i) + 2 mu U1(i) * U0(i);
end
Das Ergebnis ist im Bild Matlab.png zu sehen. Nur müsste meinem
Verständnis nach U1 kleiner werden aufgrund der Prädiktion...
Angehängte Dateien:
-

Filterstruktur.png
9,6 KB -

Matlab.png
21 KB
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.