


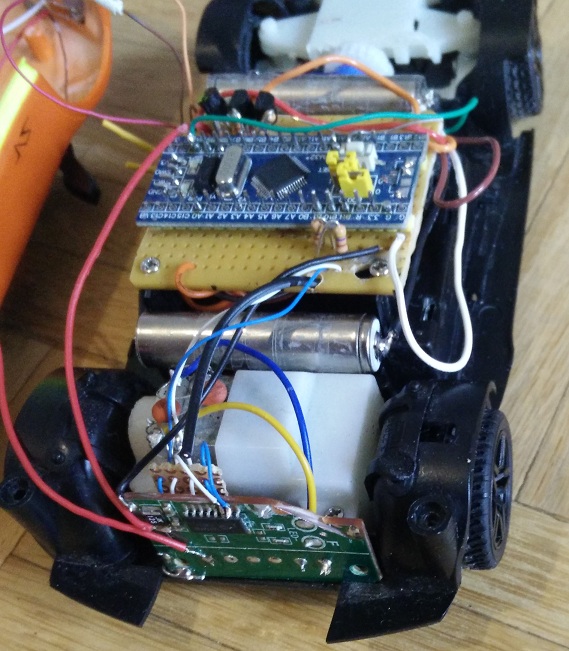
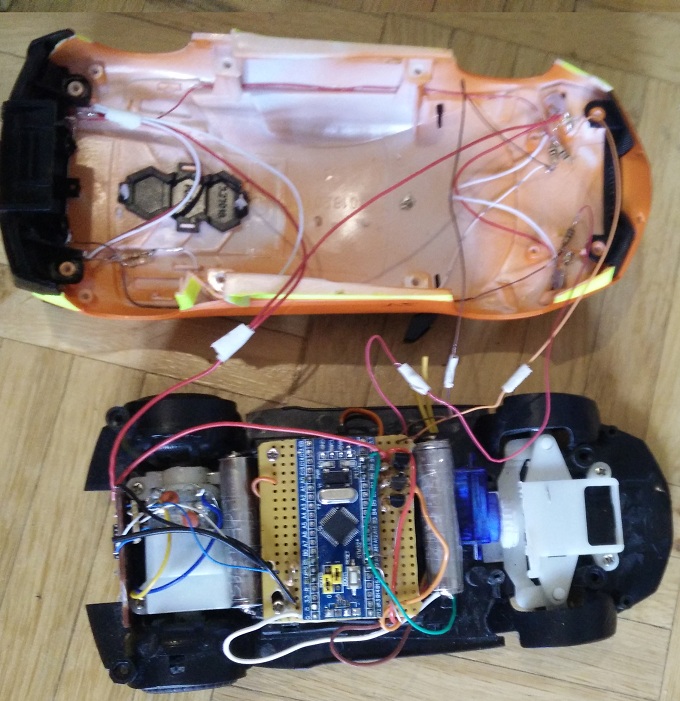
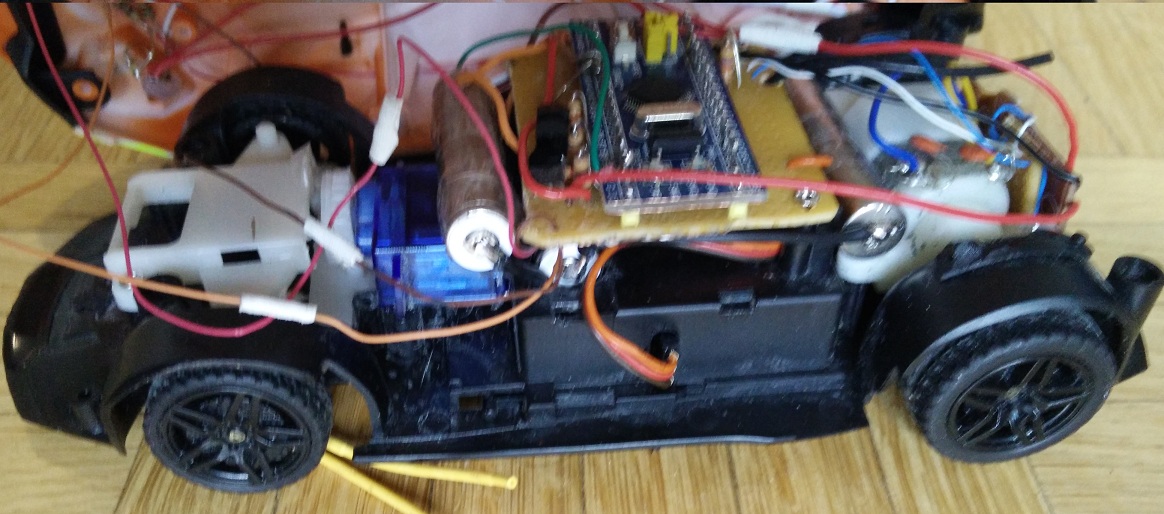
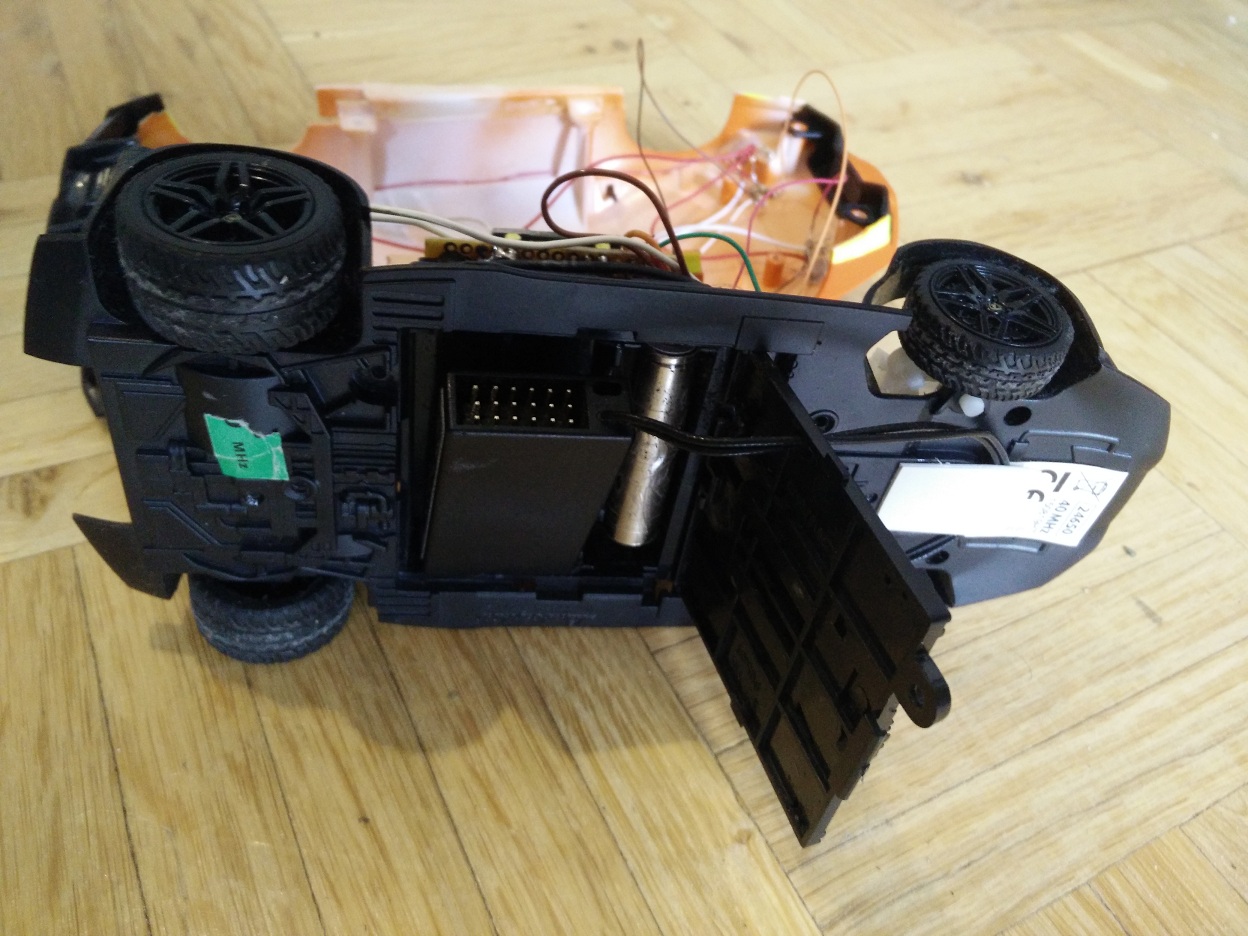
>Moin, Moin liebe Sportsfreunde. Herzlich Willkommen zu Werners Bastelstudio >direkt und live aus dem Kieler Zwietrachtstadion... Inhalt: - Intro - Ziel - Bestandsaufnahme - Ein bisschen drumrum - Bauraum - Das Herzstück - Schlusswort >Intro Die vergangenen Monaten habe ich mich mit dem Bau der 1000 und zweiten Modelbaufernsteuerung beschäftigt und als Demoobjekt und persönlichem Spaßgerät bei Conrad einen Revell Lamborghini 1:24 gekauft um mich daran kräftig aus zu toben https://www.revell.de/produkte/revell-control/cars/rc-lamborghini.html >Bestandsaufnahme Das gute Teil hat schon einen Antrieb, eine Lenkung und primäre Vorne/Hintenbeleuchtung drin und kommt mit einer einfachen Kick-Klack Funke daher. Für mich vor allem sehr wertvoll ist die hohe Modularität die das Modell hat. Verglasung von Front- und Heckscheinwerfern sind nicht einfach aufgedruckt, sondern tatsächlich mit Stiften gesteckt, welche sich hervorragend als Lichtleiter für gelbe Blinker LED´s nutzten lassen. Auf diese Stifte habe ich SMD LED´s mit Sekundenkleber geklebt. Mindestens genau so wichtig und hilfreich war ein Video, wie man das Teil öffnet (es gibt auch alles auf youtube :>) https://www.youtube.com/watch?v=3f2hbhMQibM&t=41s >Ziel Da ich alles was leuchtet sehr gerne mag, wird das Teil angelehnt an die Need-For-Speed Underground Spiele meiner früheren Tage mit einigem Licht ausgestattet. Die seitlichen Zierleisten sind schon mal Neongelb angemalt. Angepeiltes Licht: - primäres Fahrlicht - Blinker - pnkes Bodenlicht (ausstehend) - cyan beleuchtete Radkästen (ausstehend) - kleine PowerLED mittig unten in der vorderen Lufthutze (ausstehend) >Ein bisschen Drumrum Die Elektronik kommt zum größten Teil raus und wird durch modernes "stufenloses" ersetzt. Als Servo gibts einen einfachen Reely Servo S-0008. Von der Elektronik konnte ich wie gehofft die Motorbrücke behalten. Mit Dremel und Trennscheibe habe ich den Teil vom Rest der Elektronik getrennt. Mit den Ziffern auf dem IC konnte ich ein Datenblatt auf Chiniesisch finden. Aus dessen Blockschaltbild konnte ich zumindest meine Vermutung über die Ansteuerung des IC´s ableiten und durch einen kleinen Versuch bestätigen. Das Teil hat zwei H-Brücken drin, die pro Polarität jeweils einen Pin haben. Über eine etwaige im IC enthaltene Verriegelungsschaltung konnte ich nichts rausfinden, deshalb habe ich sicherheitshalber eine Transistorlogik vorgeschaltet, in der sich die beiden Ansteuersignale gegenseitig blocken. >Bauraum Man kann sich vorstellen, dass es in dem Ding recht eng zu geht - Medium Density so zu sagen. Vorallem wenn noch Randparameter dazu kommen, wie ein recht großer Empfänger, der auch noch herausnehmbar sein soll. Das sieht man auf den Fotos, wie das gelöst wurde. Gipfel davon ist, dass die Blue-Pill den USB Connector abgeben musste und die Pins der Verbinder und Booteinstellungen gekürzt wurden. Akkus sind vier AAA-Zellen, welche sich zum Teil im Fahrzeug Inneren und neben dem Empfänger im übrigen nach innen durchgefrästen Akkuschacht tummeln. Diese sind nicht tauschbar - was ich bei der vorraussichtlichen Art der Nutzung für absolut akzeptabel halte. Aber eine kleine Ladebuchse gibt es. >Herzstück Nu zum interessanten Teil der ganzen Nummer. Neben den oben genannten Beleuchtungen müssen noch der Motor und Servo bespaßt und das Summensignal vom Empfänger ausgewertet werden. Das wird auf einer STM32 Blue-Pill gemacht. Für diese habe ich ein Programm geschrieben, welches eben das Summensignal auswertet und 10 Pins anbietet, die jeweils individuell ein PWM Signal ausgeben oder eins für Modellbausservo tauglich. Das mache ich teils mit Nutzung des Ardu-Frameworks, teils mit Bitschubserrei in Steuerregistern des STM32. So wird der oben genannte Motortreiber mit Signalen versorgt, der Lenkservo und die Lichtanlage. >Schlusswort "Alles in allem ein schönes Spiel, nicht ganz fair, aber fein" :) Soll heißen, es geht im Inneren recht wild zu. Es musste viel gekürzt, gefräst und angepasst werden, bis hin zur fliegenden Verteilung der Akkus. Vielleicht mache ich mal die Trägerplatine neu - zwar auf Lochraster, aber im SMD Stil - das könnte noch mal Ordnung, Vertrauenswürdigkeit und dringend benötigte Millimeter bringen. Unter Umständen, ganz weit weg am Horizont könnte auch mal der Antrieb getauscht werden. Es gibt ausreichend kleine Outrunner Brushless Motoren, die etwas kleiner als der Reifendurchmesser sind. Oder es findet sich irgendwo ein kleines Differentialset.
Angehängte Dateien:
-

Zierleiste.jpeg
45 KB -

KarosseOben.jpg
86 KB -

KarosseHinten.jpg
53 KB -

Hinten.jpg
150 KB -

Oben.jpg
180 KB -

Seite.jpg
210 KB -

IMG_20200104_133522.jpg
310 KB
Angehängte Dateien:
-

IMG_20200111_212415.jpg
200 KB -

IMG_20200111_131029.jpg
81 KB

Gibt Updates :) In mein BluePill Sketch Beitrag "Blue Pill unter Arduino und RC-Model Servo-Signale" habe ich die WS2812 Lib von Roger Clark mit eingebaut und nach ein bisschen Bug(?)search auf SPI_2 umgelegt um die TimerCompare Ausgänge nicht ein zu schränken. Beitrag "Arduino IDE mit STM32 Core Themen, BluePill, SPI 2" Das schöne an der Lib ist, dass sie DMA-basiert ist und mir nicht mit den Timings für die RC-Signale in die Quere kommt :) Nach weiterem Gedludstraining den Tag über hab ich nu nicht nur pinkes Bodenlicht sondern alle möglichen Farben und könnte auch fancy Effekte machen. Zu meiner großen Erleichterung vertragen sich alle Komponenten was den Noise auf den Leitungen angeht. Auch wenn der Motor läuft. >>PS.: sinnvolle Foto´s / Video gibts, wenn ich ne vernünftige Kamera in die Finger kriege :>
>>>PS.: sinnvolle Foto´s / Video gibts, wenn ich ne vernünftige Kamera in die
Naja dann hättest du dir das auch sparen können..
Angehängte Dateien:
-

IMG-20200112-WA0006.jpeg
200 KB

{kind=link}
Eine nächtliche Erscheinung - Underground Racing Polizei :>
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.