Hi, wenn meine Zustände im kontinuierlichen in Simulink mit dem LQR-Verfahren bzw Pole Placement verfahren geregelt werden nehmen die Sollwerte meiner Zustände die korrekten Werte an. Nun ist es aber so das in der Praxis der Regler digital ist, d.h. ich wollte mein Zustandsraummodell in der m-File diskretisieren mit c2d-command und aus den neuen Matrizen meinen digitalen Regler Kd = place(Ad,Bd,dDesiredPole) ermitteln. Meine Zustandsantworten sind dann nicht mehr korrekt, weiss jemand wo der Fehler liegen könnte? Die Abtastzeit und Quantisierung sind ebenfalls korekt eingestellt und im Simulink Modell mitberücksichtigt (Zero-Order-Hold Block und Quantizator Block). lg und guten rutsch
Angehängte Dateien:
-

hilfelol.png
64 KB
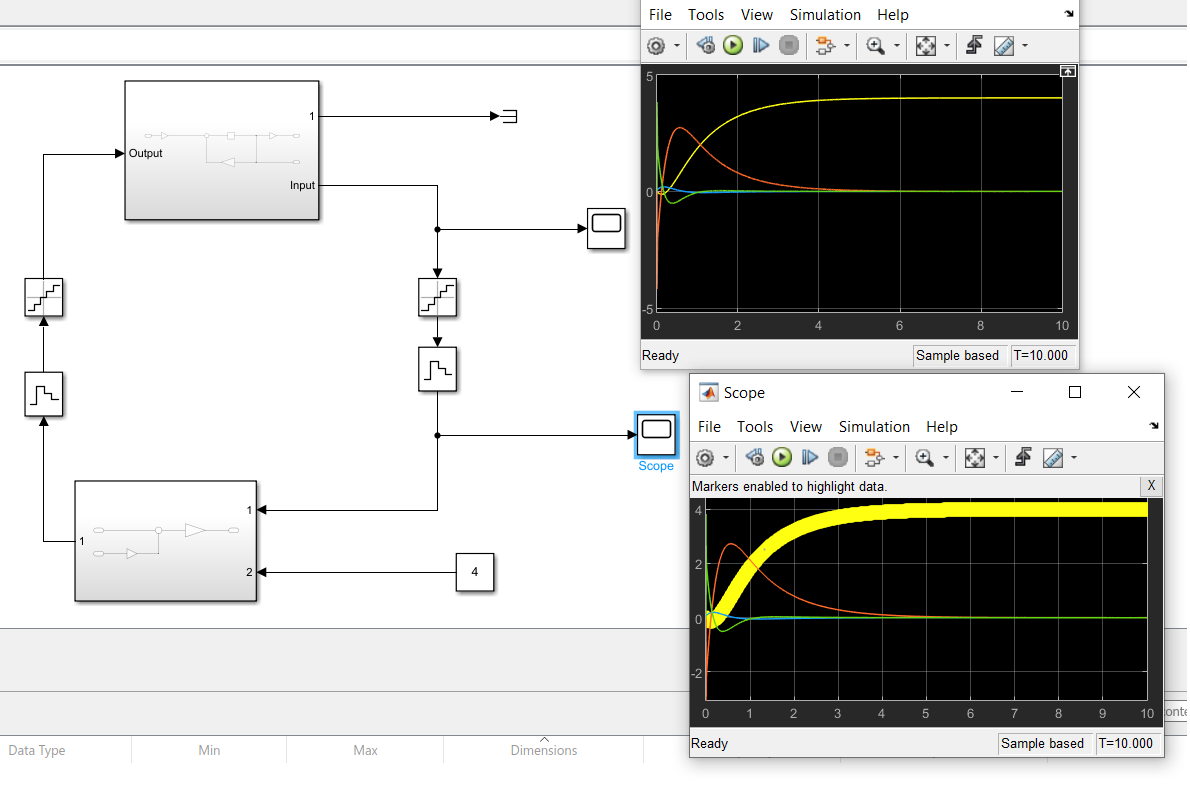
Wie man sehen kann wird das Signal gar nicht digitalisiert. Außerdem ist es zudem rauschbehaftet aus welchem Grund auch immer ?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.