Hallo Leute, ich habe 2 Microcontroller über SPI verbunden, der eine agiert als Master und der andere als Slave. Ich verwende die Controller von TI TMS320F28035. Das Senden der Daten funktioniert sie kommen erfolgreich im SPIDAT Register an das ist das Schieberegister, danach sollte das Schieberegister die Daten an dem Buffer SPIRXBUF weiterleiten. Mein Problem ist jetzt dass das Schieberegister immer die Daten empfängt aber nicht immer an dem Buffer weiterleitet von 4-5 senden funktioniert es ca. 4 mal und dann leitet er die Daten nicht richtig weiter sondern nur halb oder keine erkennbaren Daten. Kann mir jemand vielleicht weiterhelfen warum die Daten nicht immer an dem RXBuffer weitergeleitet werden, was ja eigentlich sein müsste. Danke für eure Hilfe im Vorraus. Mfg Mark
Welches Protokoll hast Du denn für EOT (end of transmission) definiert? timeout oder deselect? Du musst halt irgendwie sicherstellen, dass bei jedem sendeseitige Byte-Ende auch empfangsseitig 8 Bit durchgelaufen sind. Edit: Tippfehler. Es war ein langer Tag.
was meinst du genau mit end of transmission ich habe jetzt nicht gesehen das man das genau festlegen kann. Ich verwende aufjedenfall keinen FIFO. Der RX Buffer hat aufjedenfall 16 bit und ich sende zweimal hintereinander 8 Bit also im SPIDAT kommen die aufjedenfall immer an nur er überträgt die wie gesagt nicht immer vollständig in dem RX-Buffer. Weißt du welches Register für das End of Transmission bei TI zuständig ist? ;)
Angehängte Dateien:
-

examplefor1234.PNG
4,6 KB
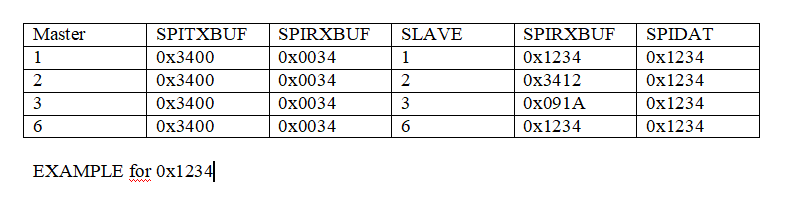
hier habe ich mal eine Tabelle erstellt für das Schieberegister und die Buffer vom Slave und Master. Als Beispiel daten habe ich die 0x1234 gesendet beim ersten senden klappt es aber beim 2ten und 3ten dann nicht mehr wie man sieht landen dann die daten vom Schieberegister nicht mehr in dem Buffer. nach dem 6ten senden ist wieder alles Inordnung.
MCs sind oftmals nur schlecht als SPI-Slave geeignet. Das Problem ist, daß SPI kein Handshake kennt, d.h. keinerlei Flußkontrolle besitzt. Man kann sich behelfen, indem man dem SPI-Interrupt die absolut höchste Priorität gibt, so daß keine andere Task ihn verzögern kann. Oder der Master legt nach jedem Byte eine ausreichende Pause ein, was das SPI aber erheblich ausbremst.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.