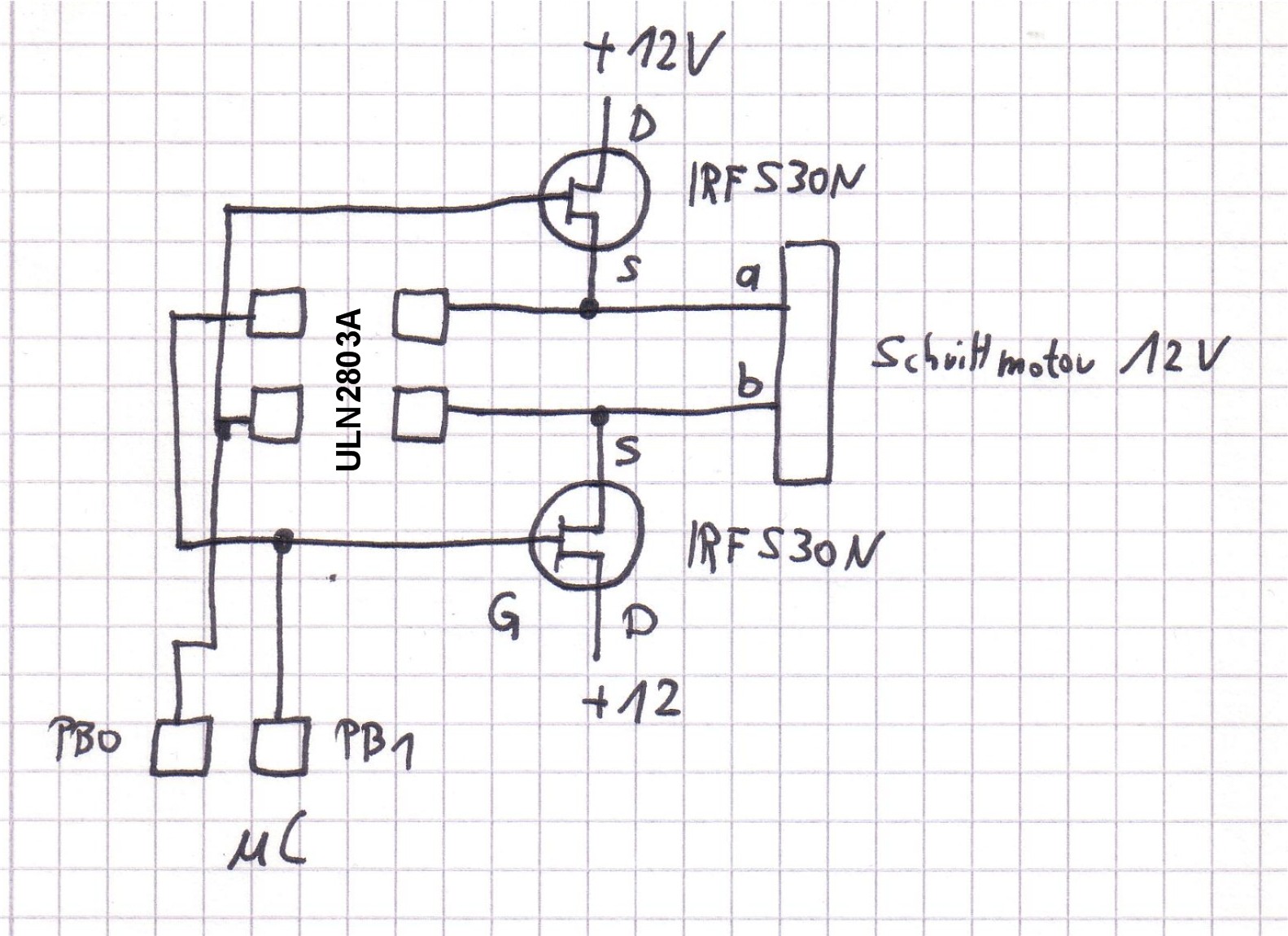
Hallo, ich möchte einen bipolaren Schrittmotor wie oben gezeigt ansteuern. Ich habe auch schon einiges hier im Forum gelesen, dass hat mich aber nur noch mehr durcheinander gebracht. Meiner Meinung nach müsste es so funktioniern, PB0 und PB1 dürfen nur nicht gleichzeitig High werden. Geht das so ? Oder macht man sowas erst gar nicht ? http://www.irf.com/product-info/datasheets/data/irf530n.pdf http://www.datasheetarchive.com/search.php?q=ULN2803 Vielen Dank für die Mühe. Heiko
Angehängte Dateien:
-

ulnmos0002.JPG
280 KB
Heiko, Das Bild sagt mir nicht viel. Du sollst Dir Eagle runterladen und einen verstaendlichen Schaltplan zeichnen. Noch dazu, mach Dich mit High-Side Mosfet Ansteuerung vertraut. Ich glaube, der Punkt deiner Schaltung braucht Ueberarbeitung. mfg
Hallo so geht das überhaupt nicht. 1.) der FET wird nie leitend, da die Spannung am Gate ca. 17V werden müßte. 2.) wieso verwendest du für die eine Seite der Brücke einen ULN mit mAs und auf der anderen einen FET der 17A kann? Nimm lieber einen H-Brücken-Treiber der an den Strom des Motors angepasst ist.
Hallo, zunächst mal Danke für die Antworten. Eagle habe ich mir runtergeladen; bis ich brauchbare Zeichnungen mit machen kann wird wohl noch eine Weile dauern. Da ich Anfänger bin wollte ich ein Programm schreiben, mit dem sich ein Schrittmotor dreht. Für mich ist es einfacher mit tatsächlichen Bauteilen zu arbeiten. Also habe ich mir erst die Komponenten besorgt und dann versucht die Sache zum Laufen zu bringen. Es erschien mir logisch, dass es wohl einfacher wäre einen Motor mit 4 Kabeln zum Drehen zu bringen als einen mit 6. Also wählte ich einen bipolaren Motor. Da die Ausgänge des Mikrocontrollers nicht arg belastbar sind nahm ich den ULN2803A. Irgendwann habe auch ich bemerkt, dass es so nicht hinhaut. Deshalb der Versuch mit MOSFET. Das Datenblatt vom IRF530N habe ich wohl auch nicht richtig verstanden ich war der Meinung, dass die 5 V Gatespannung o.k. sind. Das der IRF530N 17A 100 V schalten kann fand ich eigentlich gut, da ich ihn dann auch für andere Schaltungen nehmen kann. Oder führen solche Missverhältnisse zu Problemen. Aber habe ich es richtig verstanden: Mit dem richtigen MOSFET n Typen würde die Schaltung wie dargestellt hinhauen? Oder soll ich lieber bei dem Motor mit 6 Kabeln (unipolar+ULN2803A) weitermachen ? Nochmals Danke Heiko
einfacher ist es auf jeden Fall erstmal, wenn du einen unipolaren Motor nimmst. Bipolare haben allerdings Vorteile, wenn es um Leistung, Baugrösse, Drehmoment und Haltemoment geht.
Nee du, so haut das alles nicht hin und ein paar Grundlagen fehlen dir da auch. Schau erstmal, wie ein Mosfet wirklich funktioniert. Da findest du auch genügend alte Threads hier im Forum. Entscheidend ist, dass du am Gate je nach Mosfet 2-12 Volt höher liegst, als am Source, damit er leitet (n-Kanal). Für deinen Zweck kannst du den auch nicht direkt an einen Portpin hängen, weil der zu stark kapazitiv belastet, was zu schlechtem Schaltverhalten führt. Wenn du schnell zu Ergebnissen kommen willst, nimm lieber ne fertige H-Brücke. Wenn du dagegen Zeit hast, was zu lernen, dann lies dir erstmal ein paar Grundlagen zu Mosfet und Bipolartransistoren an. Eine Schaltung zu bauen, die bei Softwarefehlern die Brücke falsch durchschaltet, so dass alles abraucht, ist auch nicht sinnvoll. Eine Brücke sollte hardwaremäßig so verdrahtet sein, dass Softwarefehler nicht zur Zerstörung führen.
Hallo, also crazy horse den Motor werde ich, für den Anfang, wechseln -weil einfacher. Und Dir Winfried einen besonderen Dank, dass Du meine Fragen beantwortest hast. Ich werde jetzt, wie gesagt, den unipolaren Motor nehmen und mich weiter mit den Grundlagen beschäftigen. Dank an alle Heiko
musst du nicht, kannst auch geeignete fertige H-Brückentreiber dafür nehmen. Nur mit Eigenbau-H-Brücken muss man aufpassen, sonst gibts Rauch :-), ohne Grundlagen geht da nichts. Nicht doll, aber für den Anfang ausreichend: L293 oder L297/298. Gibt inzwischen aber etliche viel bessere Treiber.
Zum anfangen wär ein unipolarer Motor besser geeignet. Als FET's kann ich dir den IRFZ40 (50V/ca 30mOhm RDSon) empfehlen (vorausgesetzt dein Schrittmotor hat nicht mehr als 50V Versorgung). Wenn du Bipolare nimmst schließe ich mich der Meinung von Crazy Horse an was die Treiberstufen anbelangt. Aber schau doch mal bei RS (oder ähnlichen) nach fertigen Treibern um. (Bei RS unter: Halbleiter/IC-Interface & Sensoren/Motor Kontroller). z.B.: L6207
Für einen bipolaren (Restposten-)Schrittmotor reicht der L293 alle mal, solange es nur darum geht, das Ding drehen zu sehen (mit nem kleinen Fähnchen an der Achse). Für anstrengendere Sachen gibt es dann die L620x, die etwas mehr "Bums" haben. Die kriegt man alle bei Angelika (Reichelt). Schrittmotoren kann man recht billig (ob sie ihren Preis wert sind, kann ich nicht sagen) beim Max (Pollin). Für "richtige" Anwendungen (höhere Spannung, mehr Strom, Chopper-Betrieb [der geht auch schon mit dem L620x]) bieten sich dann diskrete H-Brücken mit Highside-Drivers an. Für den Anfang ist ein unipolarer Stepper mit der Ansteuerung über einen ULN-Baustein schon in Ordnung. Damit kann man dann schon problemlos voll- und Halbschrittbetrieb machen.
Hallo, also den L293 oder L297/298 habe ich bestellt. Statt IRFZ40 habe ich BUZ11 genommen. Den L620x hebe ich mir für später auf. Das mit der Fahne ist eine super Idee. Das könnt ich ja auch mit Cam ins Netz stellen und jeder kann, gegen Gebühr, auf die Seite gehen. Aber dann würde ich ja Geld mit verdienen und es soll doch ein Hobby bleiben. Also nochmals vielen Dank an alle. Heiko
Für "Rumkugeln" bezahle ich, aber nicht für "Rumdrehen". ;-) Den L297 kann man sich eigentlich auch sparen (mache ich zumindest), da man den L298 dann auch für andere Motoren benutzen kann.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.