Ciao zusammen Ich versuche einen Encoder zu lesen, einen der nur bei 00 und 11 rastet. Dieser Thread Beitrag "Drehimpulsgeber mit Rasterstellung bei 00/11 auswerten" hat dabei geholfen. Ich haben den dort vorgeschlagenen C-Code für AVR static uint8_t last_state = 0; static uint8_t last_cnt = 0; uint8_t new_state; new_state=PINE & (_BV(PINE4) | _BV(PINE3)); if ((new_state^last_cnt)==(_BV(PINE4) | _BV(PINE3)) ) { if ((new_state ^ last_state)==_BV(PINE4)) enc_delta+=1; else enc_delta-=1; last_cnt=new_state; } last_state=new_state; in Picbasic zu übersetzen versucht, und dabei ist das herausgekommen: 'im Kopf der Datei dim last_state as byte last_state = 0 dim last_cnt as byte last_cnt = 0 dim new_state as byte 'im main-Loop new_state = (PORTC & %11000000) if (new_state ^ last_cnt) = %11000000 then if (new_state ^ last_state) = %10000000 then 'down else 'up endif last_cnt = new_state endif last_state = new_state Dies zählt mir auch recht gut nach oben (rechtsrum), beim Runterzählen (linksrum) herrscht jedoch das Chaos. Mal wird nach unten gezählt, mal nach oben, mal wird einige Male zwischen zwei Werten hin und her gewechselt. Sieht irgendwer den Fehler? Im Moment bin ich ratlos. Wahrscheinlich habe ich etwas falsch übersetzt, weil ich bisher noch nie viel mit C zu tun hatte. Danke euch. Gruss Martin
Was genau ist das für ein Encoder? Hast Du die Impulse mal gemessen oder analysiert?
Angehängte Dateien:
-

encoder.JPG
26 KB
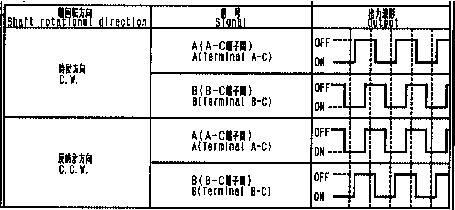
Ja ich habe kurz mit dem Ohmmeter nachgemessen und festgestellt, dass tatsächlich immer A und B entweder hoch oder tief sind. Eigentlich bin ich davon ausgegangen, dass es sich um einen "normalen" Encoder handelt, der in allen 4 Zuständen rastet, erst anhand des Datenblatts (beiliegend ein Ausschnitt) bin ich stutzig geworden. Diese Art von Encoder wird "incremental" genannt. Bei meiner Suche wurde ich dann im oben erwähnten Thread fündig. Das gesamte Datenblatt kann hier http://docs-europe.electrocomponents.com/webdocs/07a2/0900766b807a2223.pdf heruntergeladen werden. Gruss Martin
Das Ohmmeter sagt ja nichts darüber aus, was beim Drehen passiert. Hier werden nämlich zeitlich aufeinanderfolgende Flanken ezeugt. Dies muß der Code natürlich auch richtig interpretieren. Andere Encoder arbeiten nach einem anderen Prinzip (Gray-Code), wo bei jeder Rastung erst ein, dann der andere Ausgang seinen Pegel wechselt.
Ich habe mir das jetzt nochmal in Ruhe überlegt, und bin zum Schluss gekommen, dass mein Problem wohl mit ungenügender Entprellung des Encoders zusammenhängt. Weil wenn ich gaaaaanz langsam drehe geht es auch abwärts korrekt. Kann mir jemand auf die Sprünge helfen mit dem Entprellen? Kann ich den oben geposteten Code softwaremässig entprellen, wenn ja wie? Gruss Martin
Laut Datenblatt einfach Kondensatoren von den A/B-Pins jeweils nach Masse, so 100nF Keramik. Dann ist´s mit dem Prellen vorbei. Die PullUps im Controller machen den Rest.
Das scheint nicht zu reichen, ich hatte auch schon vom Entprellen mit Kondensator gelesen und hatte gerade 100n Keramik da. Ich hätte eher grössere genommen aber nahm das was ich hatte. Soll ich mit grösseren Kondensatoren versuchen? Falls wer noch eine Idee für Softwareentprellung hat wär das trotzdem noch einen Versuch wert. Gruss Martin
@ Martin Geissmann > Falls wer noch eine Idee für Softwareentprellung hat wär das trotzdem > noch einen Versuch wert. Wie schnell ist den PIC Basic? Die Abfrage des Encoders sollte so mit 100..500 Hz laufen. Sonst verschluckt sie Schritte. MfG Falk
Hier ist ne Lösung: Beitrag "Re: Drehgeber auslesen" bezogen auf die darüber liegenden Files von Simon. Mein Code (2.Posting) behandelt ja alle 4 Phasen. Peter
Ein Versuch mit 10µF Elkos brachte auch keinen weiteren Erfolg, das sollte ja weitaus genügen. Irgendwelche Ideen? @Falk: Dumme Frage, wie berechne ich, wie schnell die Abfrage läuft? Das Pic läuft mit 4MHz. @Peter: Diesen Code habe ich jetzt noch nicht ausprobiert. Danke an alle. Gruss Martin
Zu große Cs verwischen die Flanken zu stark, probiere mal kleinere (10nF). Wenn´s dann nicht geht, ist es ein anderes Problem. Haste ´nen Scope da, um mal die Flanken und eventuelle Preller zu sehen?
@Martin Geissmann > @Falk: Dumme Frage, wie berechne ich, wie schnell die Abfrage läuft? Das > Pic läuft mit 4MHz. Mit PIC Basic kenn ich mich nicht aus. Das wirst du ausprobieren müssen. In deiner Schleife musst du dazu immer ein freies Pin toggeln. Das kannst du dann mit einem einfachen Frequenzzähler oder Oszilloscop messen. MFG Falk
Ich habe etwas rumprobiert und festgestellt, dass es hilft, wenn ich die
Routine folgendermassen anpasse (alte Version siehe ganz oben):
'read encoder
new_state = (portc & %11000000)
if (new_state ^ last_cnt) = %11000000 then
if (new_state ^ last_state) = %10000000 then
'down
updown = 0
elseif (new_state ^ last_state) = %01000000 then
'up
updown = 1
endif
last_cnt = new_state
if updown = 1 then 'go up
'aufwärts
else 'go down
'abwärts
endif
endif
last_state = new_state
Jetzt funktioniert es in beiden Richtungen gleich gut (oder gleich
schlecht), es kommt jetzt vor, dass wenn man den Encoder dreht erst
einige Schritte in die falsche Richtung gezählt werden, dann die
Richtung ändert und richtig rum gezählt wird.
@Travel Rec, @Falk: Scope habe ich, konnte das aber noch nicht machen,
auch nicht mit den anderen Cs.
Gruss
Martin
Hi! Mal eine blöde Frage, erzeugt dein Encoder nun saubere Impulse oder nicht? Das encoder.jpg sieht jedenfalls gut aus. Wenn du das gemessen hast ist dein Code Mist, wenn nicht musst du besser entprellen. Industrieencoder musst du eigentlich überhaupt nicht entprellen. Viel Erfolg, Uwe
@Uwe >Das encoder.jpg sieht jedenfalls gut aus. Wenn du das gemessen hast ist >dein Code Mist, wenn nicht musst du besser entprellen. Die richtige Software entprellt das automatisch. Keine Notwendigkeit mit RC Gliedern noch rumzumachen. MFG Falk
Hi! @Falk Einen richtigen Encoder musst du überhauptnicht entprellen, es kann sogar schädlich sein wenn du hohe Geschwindigkeiten hast. MFG Uwe
@Uwe > Einen richtigen Encoder musst du überhauptnicht entprellen, es kann > sogar schädlich sein wenn du hohe Geschwindigkeiten hast. Das hatten wir doch schon mal. Sehr ausschweifend! ;-) MfG Falk
Hi! @Falk ja , kenne ich, spreche aber aus eigener Erfahrung. OK, 10-Bitinterpolation habe ich noch nicht gemacht, und halte ich auch nicht für unbedingt sinnvoll, ja geht natürlich, Dreck und Temp. tun dann aber ihr übriges. Richtige Schirmung und Signalübertragung sind da wichtiger. (Ich kenne mich aber nur mit Antrieben bis 15KW und 1G aus.) MFG Uwe
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.