Hallo, ich brauche einen Schrittmotor der eine Drehzahl von 1800 U/min erreichen kann, bei einen Schrittwinkel von 1.8 oder 3.6 Grad. Ist es möglich soetwas zu bekommen? Vielen Dank Christopher
1800 rpm entspricht einer Umlauffrequenz von 30 1/s Bei 200 Schritten pro Umdrehung kommt man auf eine Schrittfrequenz von 6kHz... Ist das schnell?
Für'n Schrittmotor ist das schnell! Wenn da noch ziemlich Masse im Spiel ist brauchste 'ne gute Ansteuerung (Sanftanlauf usw.) und es fließen ordentliche Ströme.
@Sonic Die Kräfte und Masse sind sehr gering. Das erforderliches Drehmoment liegt bei 5 mNm.
@ Rahul Wo liegt denn die Grenzfrequenz eines Schrittmotors? Ich denke 6kHz sind schon eine ganze Menge.
>Wo liegt denn die Grenzfrequenz eines Schrittmotors?
Das sollte der Hersteller wissen...(rekursive Antwort...)
Ja sicher, aber ich möchte gern wissen ob diese Geschwindigkeit überhaupt mit Schrittmotoren möglich ist bevor ich danach suche.
Mit einem Getriebe wird leider die Auflösung von 1,8° oder 3,6°, je nach Übersetzung, grösser.
6000 Schritte/s sind kein Problem. Dein Motor sollte aber eine möglichst kleine Induktivität aufweisen, erkennbar an kleinem ohmschen Widerstand (z.B. 1V, 1A DC-Nennwerte). Als Versorgungsspannung brauchst Du mindestens 24V.
Was solls denn werden? Wahrscheinlich ist ein Servo die bessere Wahl. MfG Falk
Ich würde einen DC-Motor vorschlagen. Aber, wie vorher schon erwähnt, kommt es auf die Anwendung drauf an. Bei 1800 U/min sehe ich die meisten Stepper als suboptimale Lösung. Und wenn es wg dem Verschleiß ist, seit einiger Zeit gibt es bezahlbare BLDC. MW
Vexta ist z.B. ein renomierter Hersteller, schau da einfach in den Datenblättern nach. 1800 U/min sollte m.E. problemlos funktionieren. Deine Ansteuerung muss aber hohe Spannungen zur Verfügung stellen können, damit noch genug Strom bei diesen Frequenzen fließen kann.
>Deine Ansteuerung muss aber hohe Spannungen zur Verfügung stellen >können, damit noch genug Strom bei diesen Frequenzen fließen kann. Die Begründung ist nicht ganz richtig: Man benutzt deswegen eine höhere Spannung, weil dies zur Erhöhung der Schrittfrequenz beiträgt. Ist der Motor in Ruhe, benötigt er eine wesentlich kleinere Spannung bzw. eine Strombegrenzung. Das macht man dann im Chopper-Betrieb.
Moment, es hat schon was mit dem Strom zu tun: Bei hohen Freuqenzen ist nämlich der Anstieg der Sollkurve der Ansteuerung (Sin im Microsteop) größer, als das, was die Spannung durch die Spule treiben kann. Dann ist der Strom zu gering und das Drehmoment sinkt -> Schrittverlust! Höhere Spannung hilft hier.
Angehängte Dateien:
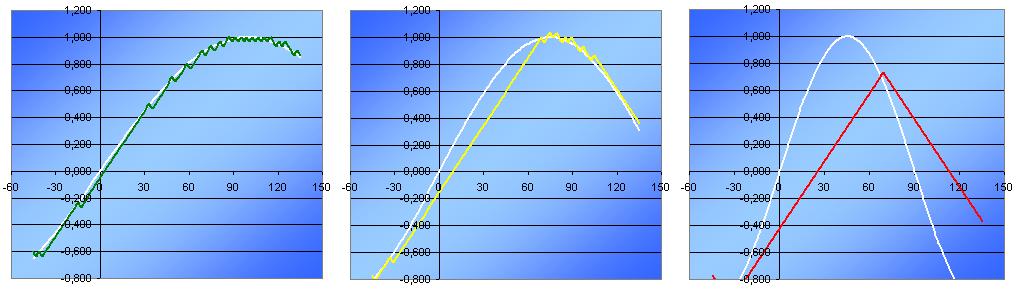
Noch ein Bildlein zur Verdeutlichung des Ausfalls der Stromregelung bei Schrittmotoren (Stromführung) für Freuqenzen oberhalb der Grenzfrequenz der Spule/Treiberschaltung. Mehr Spannung ließe die Anstiege steiler werden, sodaß höhere Frequenzen wieder möglich sind.
@Falk und auch alle anderen Ich möchte gern in max. 10ms einen Winkel von 0°-100° einstellen können. Das ganze in einer möglichst hohen Auflösung. Die Übersetzung von Motorzahnrad zu dem Zahnrad welches sich in besagter Zeit bewegen soll, sollte 1:2(oder höher) sein. Mit Servos hab ich noch gar nicht gearbeitet sind die teuer? Danke Christopher
...die Scheibenläufer von Portescap bieten hohe Drehmomente bei hoher Auflösung und Positioniergeschwindigkeit (Leider auch bei hohem Preis). Aber auch die anderen Motörchen sind ganz interessant: www.portescap.com
@Christopher
>Ich möchte gern in max. 10ms einen Winkel von 0°-100° einstellen können.
Das klingt nach einer sehr ähnlichen Aufgabe, wie sie die Positionierung
der Schreib/Lese Arme bei Festplatten machen muss. AFAIK wurde das
früher mit Schrittmotoren gemacht, heute aber mit Servos, weil das
wesentlich schneller und leiser ist. Details? Keine Ahung.
MFG
Falk
Das ist ein guter Tipp mit der Festplatte, da könnte ich mal nachschauen. Danke Christopher
Hallo Christopher, 100° in 10ms ist vermutlich ein echtes Problem. Das klappt schon wegen der niedrigen Startfrequenzen der Stepper nicht. Auch mit einem DC-Servo wird's da eng. Ich denke, wenn Du mit 100Hz random positionieren willst, kommst Du um ein VoiceCoil-System mit feedback nicht rum. Such mal im Web nach Laserscanner und Selbstbau. Gruß Uli
@ Uli Ja das mit den 10ms ist schon verdammt schnell. Ich brauch Sie aber leider für eine Regelung. Über die VoiceCoil Systeme hatte ich mich schon informiert die sind aber sehr teuer. Ich schau mal nach den Laserscannern. Danke Christopher
Hallo es gibt s.g. Galvos, die in Laseranlagen verwendet werden. Die Motoren zittern regelrecht in ihrem Stellbereich herum. Wie sieht es bei Schrittmotren im anderen Fall aus, also bei extrem langsamer Ansteuerung (ca. 10-30Hz)? Bei den meisten Schrittmotoren gibt es im Datneblatt eine Kurve Frequenz/Kraft. Ab etwa 100Hz beginnen diese Grafiken, der Bereich 0-100Hz ist nicht angegeben. Ist dieser Bereich zulässig für den Betrieb? Hupfen die Motoren dann mit ihrer maximalen Kraft Schritt für Schritt vorwärts? Sorry für Offtopic, aber trotzdem Danke für eure Antworten Gruß Alex
> Ja das mit den 10ms ist schon verdammt schnell. Ich brauch Sie aber > leider für eine Regelung. Über die VoiceCoil Systeme hatte ich mich > schon informiert die sind aber sehr teuer. Wenn es was industrielles werden soll dann wird es eben teuer... Soll es was bastelmaessiges sein dann wuerd ich in der Tat ein Festplatte ausschlachten und den Motor daraus verwenden. Allerdings musst du dir dann wohl noch was einfallen lassen wo du die Istposition abgreifen kannst. Letzeres hat uebrigens noch einen anderen Vorteil. Du kannst vor dem Aufbau in das Datenblatt der Festplatte schauen und weisst dann schon was die Mechanik kann. Solltest du dabei feststellen das dir die Platte zu langsam ist dann hast du ein Problem, weil Spurwechselzeit ein wichtiger Parameter bei Platten sind und die in grossen Stueckzahlen hergestellt werden. Etwas selber zu bauen das auch nur genausogut ist wird in Arbeit ausarten weil die Hersteller da schon jede Menge Gehirnschmalz reingesteckt haben und es selber nicht besser koennen. Olaf
Das wird verdammt eng, Servos brauchen mindestens 60ms, Festplatten haben keine 100°, für Galvos dürften selbste die 5mNm etwas zu viel sein hängt natürlich von der Dimensionierung ab. Als Positionsrückmeldung errinere ich mich an ein uraltes Elektor, die haben einfach ein weises Papierstückchen mit angeklebt und dann über eine Reflexlichtschranke die Neigung (Reflektion) ausgewertet (geht aber natürlich auch nicht über 90°). Voice-Coil, Galvos, Festplatte ist imho alles das selbe zumindest von der zugunde liegende Technik. Du könntest dir auch noch Drehspulmessgeräte ansehen, die sollte man auch ziemlich schnell treiben können. Die Tacho Anzeigen von Autos lassen sich vielleicht auch Tunen (Dämpfung entfernen, Zeiger ab ...) -wiebel
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.