Da ich trotz ausführlicher Google Nachforschungen noch immer nicht dahinter gekommen bin wie es sich mit den Pegeln auf den CAN Leitungen verhält, will ich es mal hier versuchen. Mein Problem ist, dass ich trotz dem Blockschaltbild des CAN Controllers (z.B. PCA82C250) mir die Pegel auf den Leitungen nicht vorstellen kann. Wenn ich nun einmal vom einfachsten Fall mit lediglich 2 Geräten am Bus ausgehe.Wenn zu Anfang sich beide im High Impedance Zustand befinden, welche Pegel habe ich dann auf CAN-L und auf CAN-H? Müssen irgendwelche Pullup bzw. Pulldown Widerstände am Bus angebracht werden damit die Sache funktioniert oder wo steckt das Geheimnis? Danke schonmal für die Hilfe!
Ohne Abschluss geht es nicht. Und es zählt die Differenz zwischen CANH und CAHL, nicht der absolute Pegel. Jedenfalls solange sich das in Grenzen hält. Recessive: Alle Treiber offen, d.h. CANH=CANL, Differenz 0. Dominant: CANH=high, CANL=low, Differenz entsprechend gross.
PS: Es ist der Abschluss, der bei "recessive" für den ausgeglichenen Pegel sorgt. Pullup/down sind deshalb weder sinnvoll noch zulässig.
Danke erstmal für die schnelle Antwort! Das es um die Differenz der Pegel geht weis ich, nur konnte ich mit der Tabelle auf http://www.me-systeme.de/canbus.html nur nichts Anfangen. Laut dieser ist im Dominanten Zustand CANL auf Low und CANH floating da der Transistor gegen VCC geöffnet sein soll. Aber mit deiner Erklärung is es sonnenklar. ^^ Damit brauche ich lediglich den Abschlusswiderstand und keine Pullup bzw. Pulldown Widerstände, sehe ich das richtig?
Pullup/-down entsprechen nicht der Bosch-Spezifikation, ABER es ist sehr wohl sinnvoll. Man kann damit den Signalpegel abstand vergrößern. Nicht umsonst wird im VW-Konzern mit Pullup/-down Widerständen in den CAN-Leitungen gearbeitet.
> Damit brauche ich lediglich den Abschlusswiderstand und keine Pullup > bzw. Pulldown Widerstände, sehe ich das richtig? Korrekt. Im Unterschied zu RS485 ist der ausgeglichene Ruhepegel bei CAN ein sauber definierter Zustand. Obelix mag recht haben, dass etwas "Gegenspannung" per Pullup/down den Störabstand vergrössern kann, d.h. bei "recessive" ist dann CANH<CANL. Aber vergiss das. Sowas wird erst interessant, wenn du in stark versauter Umgebung arbeitest.
Wie werden diese denn dann eingeschaltet? Ein Pullup auf CANH und ein Pulldown auf CANL würde ja zu einer Differenzspannung im Recessive Zustand führen. Oder wird nur z.B. ein Pullup auf CANH verwendet? Bei den Abschlusswiderständen ist es ja klar, dass sie an den Leitungsenden gebraucht werden. Wo würden diese Pullup/-down Widerstände angebracht werden?
Angehängte Dateien:
-

Namenlos.jpg
11 KB
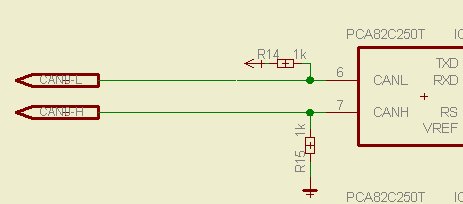
Das sieht dann so wie im Bild aus. Es wird dann kein Terminator eingesetzt.
Damit liegt man allerdings bei PCA82C25x und MCP2551 ausserhalb der Spezifikation, denn die definieren CANH-CANL nur innerhalb von -1,0V..+5,0V, hier aber sind es -5,0V.
Habe mir jetzt die Application Note 228 etwas angesehen es sieht so aus, als ob das ziemlich genau das ist, was ich gesucht habe. Werde es mir morgen nocheinmal genau ansehen. Danke auf jedenfall für eure Hilfe.
@A.K. Wie kommst du auf -5V ??? Wo sollen die denn her kommen? Bei den Maximal zulässigen Spannungen an den Pins wird die Spannung gegen Masse gemessen und nicht differenziel.
Nach dem Datenblatt hast du wohl recht. Was setzt den der VW-Konzern für CAN-Tranciever ein? Oder ... Das im Datenblatt ist so zu interpretieren, dass der PCA82C250 ab diesen Pegeln Recessive bzw. dominant erkennt. Wenn man sich beispielsweise nur zum Vergleich mal VIL anschaut, dann steht da ja -0,3V bis 0,3Vcc. Das ist der Bereich wo der Chip sicher Low-Pegel erkennt. Der Chip geht deswegen aber nicht über 0,3Vcc kaput. Dazu gibt es ja die Limiting Valus auf Seite 5. Da taucht Vdiff aber nicht mehr auf. Auch nach Bild 11 sehe ich keinen Grund, warum der Chip das nicht verkraften sollte. Naja, ist auch egal, ich habe das so im Einsatz und es funktioniert seid Jahren wunderbar.
> Was setzt den der VW-Konzern für CAN-Tranciever ein? Dein Bild zeigt eben den PCA82C250. Sicher, kaputt geht er ausserhalb davon nicht, und es ist auch kaum anzunehmen, dass die Pegelerkennung plötzlich umkippt. Es wird wohl eher so sein, dass diese Range so aus der CAN Spezifikation abgeschrieben wurde.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.