Grüße euch!
Ich und ein Kollege entwickeln momentan ein neues "Fishfinder-System".
Es wird hierzu eine Steuerungsapplikation die Platinen ansteuert
verwendet. Ein Funkmodul befindet sich am Ufer, das andere ist am Boot
angebracht. Wir wollen, bei nicht all zu starker Strömung ziemlich genau
die Position halten können. Um die Aufgabenstellung des an einem
Fixpunkt treibenden Bootes zu lösen, wollen wir GPS-Daten mit dem
Funkmodul (übrigens mit einem Atmege128 ausgestattet) einlesen, an die
Basisstation schicken und dort auswerten. Das heißt im Klartext, dass
das Boot einen bestimmten "GPS-Sollwert" hat (Längen-und Breitengrade).
Weicht nun der "GPS-Istwert" vom "GPS-Sollwert" ab, so wird dies durch
am Boot angebrachte Motoren mit Schiffsschrauben ausgeglichen.
Nun kommen einige Fragen auf:
.)Was ist eure Meinung dazu? (ist eine solche Navigation mit dem
GPS-System "u-blox" in punkto Genauigkeit überhaupt möglich / wenn JA,
wie viel Meter würde sich das Boot von einem "GPS-Fixpunkt" wegbewegen?
.)Kann man bei den Modulen einfach die RX- und TX- Datenleitungen
herausführen und in Form einer RS232-Verbindung verwenden?
.)In welcher Form bzw. in welchen Zeitintervallen erhält man die
Signale?
Wir haben bereits ein GPS-System von Navilock mit Hyperterminal
getestet, und sind auf folgende Datenstrukturen gestoßen:
$GPGGA,170834,4124.8963,N,08151.6838,W,1,05,1.5,280.2,M,-34.0,M,,,*75
Arbeitet ublox ebenfalls mit NMEA-Strukturen?
Ich hoffe ihr können mir meine Fragen weitgehend beantworten und mir
vielleicht zusätzliche Infos liefern. Somit wäre ich euch sehr verbunden
wenn ihr mir baldige Antwort auf meine Fragen zukommen lassen würdet.
hochachtungsvoll
Theiser Matthias
Hallo Matthias, zu 1) Meine Erfahrung mit dem ublox GPS-Empfänger ist gut. Eine erste Position bekommst Du bei normaler Satellitenlage (>3) innerhalb von etwa 30s. Bis dahin treibt Dein Boot irgendwo rum. Wenn Du nicht allzu große Anforderungen bzgl. Deines "Fixpunktes" stellst und einige Abweichungen erlaubst, dann kann das schon klappen. zu 2) Die Leitungen RX und TX kannst Du einfach verwenden. Wenn die 3V Pegel ausreichen, dann geht das direkt an einem Mikrocontroller. zu 3) Die ublox GPS-Empfänger haben einige proprietäre Nachrichten, also solche, die nicht im NMEA Standard definiert sind. Damit kannst Du festlegen, welche Nachrichten überhaupt vom GPS-Empfänger gesendet werden und mit welcher Frequenz. Die Nachricht GPGGA ist schon ein guter Anfang. Darüber hinaus hat ublox noch ein proprietäres Binärprotokoll mit dem Namen UBX. Damit kannst Du einiges mehr anstellen und Dein Boot intelligenter machen. Alles in allem sind die ublox GPS-Empfänger gutmütig und verrichten zuverlässig ihren Dienst. Für weitere Fragen melden!
OK, also erstmal GROßEN DANK !!! Dachte nicht das sich jemand so flott und dann auch noch so ausfürlich meldet. Also das Boot wird so und so erst ins Wasser gestellt, sobald ein ordentliches Signal empfangen wird. Nun habe ich noch eine kleine Frage: Nachdem ja das Signal abweicht von NMEA und du erwähnt hast, dass man einstellen kann, dass nur bestimmte Daten gesendet werden, wäre es echt nett von dir wenn du mir ein wenig "gefilterte" Informationen übermitteln könntest. Also mit "gefilterten" Infos meine ich kein kompliziertes Zeugs, ... viell. 'n Beispiel wie ein solcher Datensatz aussieht oder so. Weiters wäre für mich intressant welche Pins außer RX und TX der ublox noch verwendet werden müssen bzw. sollten. Freue mich bereits auf weitere kompetente Hilfe, DANKE im Voraus !!!
Den genauen Aufbau der Nachrichten bekommst Du bei ublox. In ihrer Protokoll-Spezifikation sind sowohl die NMEA als auch die UBX-Nachrichten ausführlich beschrieben! Neben RX und TX brauchst Du nur noch die Antenne anschließen. Eine größere Herausforderung wird der Aufbau der Platine sein. Mit einem guten Design kannst Du einige dB herausholen. Die Nachrichten, die ihr verschicken müsst, könnt ihr als Zeichenkette vorweg aufbereiten. Diese werden sind nicht verändern. Wenn ihr also beim Hochfahren den GPS-Empfänger richtig einstellt, dann werdet ihr nur noch Nachrichten erhalten. Etwas haariger wird es allerdings, wenn ihr beide Protokolle gleichzeitig nutzen wollt. Für diesen Fall müsst ihr die eingehenden Daten nach Nachrichten (NMEA oder UBX) durchforsten und trennen. Mit etwas Zeitaufwand leicht zu bewältigen. Die Unterlagen, die Du bei ublox - nach einer kostenlosen Registrierung - erhalten kannst, sind echt gut! Darüberhinaus will ich euch den Spaß natürlich nicht nehmen! Wenn ihr noch konkretere Fragen habt, dann melden!
Wo kauft ihr die ublox Chips? Bei www.u-blox.com kostet ja das Shipping ein kleines Vermögen. Die sind hier in der Schweiz ganz in meiner Nähe, aber ich kann keinen Chip abholen, die sind wohl ziemlich unflexiebel Über eine andere Bezugsquelle wäre ich dankbar, wenns dann noch in der Schweiz ist, wäre das natürlich toll! Gruss reflection
Beschaffe dir eine CR4 bei Conrad oder wo anders. Diese u-Blox Maus mit Antaris Chipsatz kann man leicht von USB auf Seriell (TTL) umbauen und ein halbwegs dichtes Gehäuse hast du auch noch.
Danke dir erstmal für die Info!
Paar kleine Fragen noch:
1)Könntest du mir mal den Datensatz übermitteln der bei diesem Modul zu
erwarten ist, bzw. wo ich genauere Daten finde ... weil auf u-blox.com
finde ich mich nur sehr schwer zurecht ... wäre dir für nähere Infos
bzw. Link sehr Dankbar
2)Bin leider nicht so der "Elektrotechnik-Freak", somit hab ich keine
Ahnung mit welchem Kabel bzw. Modul ich von USB auf RS232 kommen.
Vielleicht kannst du mir bei Conrad Artikel zur Konvertierung zeigen
Bedanke mich mal recht herzlich und verbleibe vorerst
mit freundlichen Grüßen
Matthias
So sieht das Innenleben in etwa aus. http://www.u-blox.de/products/c04_4h.html Auf dem Bild sieht man welches u-Blox Device drauf ist, somit bekommst du auch über die Beschreibung den Datensatz heraus (NMEA183,UBX,RTCM). Zum Umbau ist kein Adapter nötig. Man schraubt das Gehäuse auf, lötet einen oder zwei Widerstände um und lötet die USB-Leitung an die seriellen Pins (am besten USB-Stecker dan abschneiden).
Angehängte Dateien:
-

gps_an_rnmega128.png
190 KB
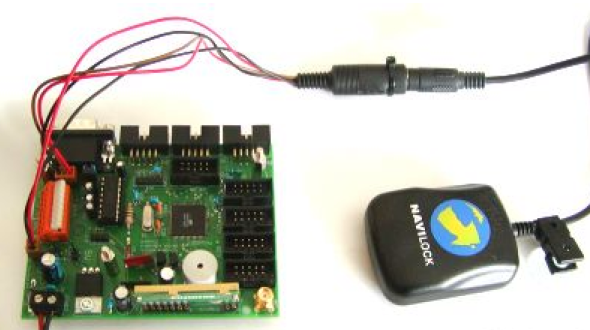
Erstmal wieder DANKE für die rasche Antwort ... jedoch, wie soll ich wissen welche Widerstände ich umlöten muss ? Und noch ne kleine Frage ... sehe ich das richtig, dass ich dann nur Stromversorgung (+ und - Poole der USB-Leitung versorgen muss) und RX bzw. TX gemäß D+ und D- an mein Board anlöten muss und schon empfange ich alle ca. 1 Sekunden GPS-Daten ? Hoffe ich gehe dir nicht aufm Keks, aber du bist da bestimmt mehr bewandert als ich, also schon mal Danke im Voraus !!! P.S.: Im Anhang findest du eine solche Applikation, nur frage ich mich warum 5 Litzen auf das Board geführt werden (also ich zähle da nur 4 --> Versorgung "+" und "-" und RX und TX ... bitte um kurze Erklärung ...´THX
Hier findest du den Schaltplan der Maus. http://imperia.mi-verlag.de/imperia/md/upload/article/665ag0107.pdf Dort ist auch beschrieben was man machen muss zum Umbau . USB ist dann nicht mehr vorhanden. Man braucht mindestens 4 (5) Leitungen zum GPS-Modul : VCC,GND,RXD,TXD,(GND) . Nach dem Anschluss der Versorgungsspannung bekommst du nach kurzer Zeit die NMEA Daten die defaultmaßig ausgewählt sind.
Na gut,... dann sag ich mal großen DANK, werde mir dieses Sytem bald zulegen, Code-bzw. Programmentwicklungen laufen ja schon. Wenn Probs auftreten melde ich mich einfach gg ... also nochmals THX !!!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.