Hi. Mir ist schon klar, dass wenn ich ein Pol Nullstellendiagramm gegeben habe die Übertragungsfunktion bis auf eine Konstante eindeutig bestimmt ist. Ich weiss aber nicht wie man nun anschaulich aus dem Diagramm Informationen entnimmt ohne die Übertragungsfunktion aufzustellen und "durchzurechnen". Kann mir jemand anschauliche Deutungen von den Diagrammen näherbringen? Am besten auch mit "Begründung" warum dies und das so ablesbar ist. Danke.
zeichne dir das Pol-NS diagramm (mam besten in Matlab) und vergleich es mit der Uebertragfkt.... ich stell mir das ein wenig wie ein "Zirkuszelt" vor: die NS drucken nach unten, die PS nach oben
Angehängte Dateien:
-

butterworth.jpg
120 KB
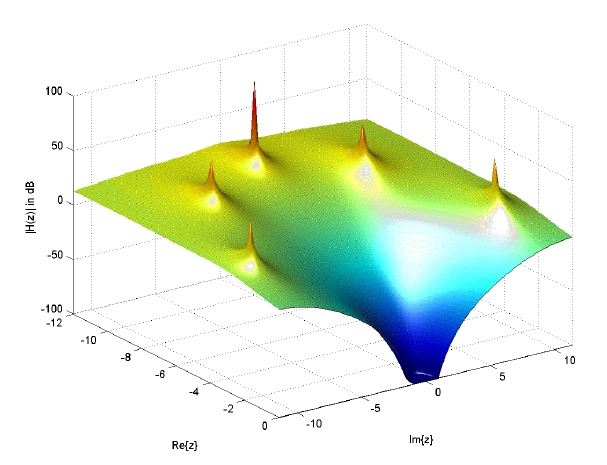
Man muss sich das so vorstellen: Die Übertragungsfunktion, genauer deren Betrag gibt die Höhe einer 3-dimensionalen Funktion aufgespannt über der komplexen Ebene an. Nullstellen ergeben "Täler", Pole "Gipfel", wenn man so will. Im Bild ist das für einen Butterworth Tiefpass dargestellt. Verändert sich die Frequenz so bewegt man sich auf der imaginären Achse, d.h. die Schnittkante mit der j-Achse ist der Amplitudengang des Filters.
Angehängte Dateien:
-

fir.jpg
120 KB
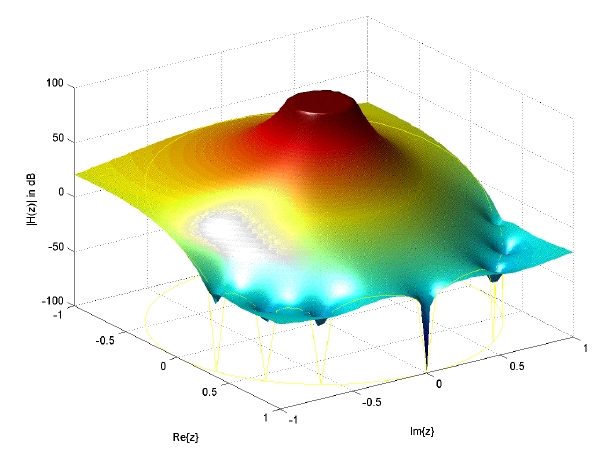
Im Digitalen kann man sich das gleichermassen vorstellen, allerdings wird die komplexe Ebene mit einem Zylinder mit Radius 1 und Mittelpunkt 0,0 geschnitten und der Amplitudengang ergibt sich aus der entstehender Schnittkante. Wie Kreise das so an sich haben, man kommt irgendwann an einen Punkt an dem man schon mal war, abhängig von der Abtastfrequenz eben früher oder später :-)
Ich hab hier bei einem Pol Nullstellen Applet mal ein paar Sachen gelesen zu denen ich gern eine genauere Erklärung hätte. "Eine Polstelle bewirkt einen Abfall des Betrages der Übertragungsfunktion ab einer Grenzfrequenz." Ich dachte Polstellen drücken nach oben? Und wie krieg ich aus ner Polstelle die zugehörige Grenzfrequenz? "Ebenfalls (bei einer Polstelle, Anmerkung von mir) erfolgt eine Phasendrehung bei der Grenzfrequenz um -90 Grad." Warum das? "Je weiter ein Pol vom Ursprung der komplexen Ebene entfernt ist, um so schneller ist das System. Dabei ist zu beachten, dass ein System mit einem rechts ( " langsam") liegenden Pol nicht durch das Einbringen eines weiter links liegenden Pols schneller gemacht werden kann. Rechts liegende Pole dominieren in der Regel das Systemverhalten." Was heisst Schneller? Schwingt sich schneller ein? Warum sind rechts liegende Pole dominant? "Eine Nullstelle bewirkt einen Anstieg des Betrages der Übertragungsfunktion sowie eine Phasendrehung um +90 Grad bei der zu der Nullstelle gehörenden Grenzfrequenz." Nullstelle und Anstieg? Warum wieder Phasendrehung? Wäre dankbar wenn mir das jemand erklären würde...
Ach noch der Link zu dem Text und dem Applet: http://www2.iei.tu-clausthal.de/~promise/polnull/Main.htm?Submit6=Applet
> "Eine Polstelle bewirkt einen Abfall des Betrages der > Übertragungsfunktion ab einer Grenzfrequenz." > Ich dachte Polstellen drücken nach oben? Und wie krieg ich aus > ner Polstelle die zugehörige Grenzfrequenz? Der Pol drückt nach oben. Der Pol hat aber nur einen bestimmten "Wirkungskreis" irgendwann geht's auch wieder runter. Denk daran, dass negative Frequenzen eine Spiegelung der positiven sind. Beachten muss man auch noch, dass in einem Bode-Diagramm wie man's normalerweise sieht die Frequenzachse logarithmisch skaliert ist. In den Bilder oben ist die imaginäre Achse linear! > "Ebenfalls (bei einer Polstelle, Anmerkung von mir) erfolgt eine > Phasendrehung bei der Grenzfrequenz um -90 Grad." Die Phase ist definiert als:
Wenn man sich klar macht, dass s = a + jb ist und man etwas Trigonometrie anwendet kommt man da schnell drauf. An einer Polstelle (bzw. der Grenzfrequenz) gilt
Damit ist die Phase
Negativ wird die Phase, da der Pol im Nenner vorkommt. > "Je weiter ein Pol vom Ursprung der komplexen Ebene entfernt ist, um so > schneller ist das System. Dabei ist zu beachten, dass ein System mit > einem rechts ( " langsam") liegenden > Pol nicht durch das Einbringen eines weiter links liegenden Pols > schneller gemacht > werden kann. Rechts liegende Pole dominieren in der Regel das > Systemverhalten." > Was heisst Schneller? Schwingt sich schneller ein? Warum sind > rechts liegende Pole dominant? Da muss man erstmal bissel Klarheit schaffen. Rechts liegender Pol meint immernoch Pol links der imaginären Achse (negativer Realteil), aber eben weit rechts in der linken Halbebene (nach bei der imaginären Achse). Stell dir nun wieder vor du bewegst dich auf der imaginären Achse. Ein Pol liegt bei -1 und einer bei -100. Wessen Auswirkungen spürst du am ehesten? Die des nahen Pols, er dominiert damit das Verhalten. Zum Thema Geschwindigkeit. Hinter all diesen Übertragungsfunktionen und Systemen stecken lineare Differentialgleichungen mit konstanten Koeffizienten (nur deshalb funktioniert die Laplacetransformation). Die Lösung einer solchen Differentialgleichung hat immer die Form:
r_i ist darin das s.g. Residuum und p_i ist der Pol. Die e-Funktion klingt umso schneller ab, je grösser p_i ist. Hier sieht man auch wieder das Problem der Stabilität. Liegt der Pol in der rechten Halbebene (positiver Realteil) wird das Argument der e-Funktion positiv und sie klingt eben nicht mehr ab. Man kann sich das auch so erklären. Zerlegt man eine Übertragungsfunktion mittels Partialbruchzerlegung in Teilsysteme:
So ist der Einfluss des Teilsystems auf die Gesamtsystemeigenschaften umso grösser, je grösser das Verhältnis von Residuum zu Pol ist (natürlich Absolutwerte). > "Eine Nullstelle bewirkt einen Anstieg des Betrages der > Übertragungsfunktion sowie eine Phasendrehung um +90 Grad bei der zu der > Nullstelle gehörenden Grenzfrequenz." > Nullstelle und Anstieg? Warum wieder Phasendrehung? Wie gesagt es kommt immer auf den Standpunkt an. Befindet man sich im Tal ist es ein Aufstieg, befindet man sich am Berg ist es ein Abstieg.
Hallo, lineare Systeme werden durch ein System von linearen Differenzialgleichungen beschrieben. Diese Gleichungen lassen sich mit der Laplace-Transformation in ein System gebrochen rationaler, komplexer Gleichungen überführen. Gebrochen rationale Gleichungen lassen sich über eine Partialbruchzerlegung in folgende Form überführen: G(s) = k * ((1-b0*s)*(1-b1*s)*...*(1-bm*s)) / ((1-a0*s)*(1-a1*s)*...*(1-an*s)) oder G(s) = k * N(s)/P(s) mit N(s) = ((1-b0*s)*(1-b1*s)*...*(1-bm*s)) und P(s) = ((1-a0*s)*(1-a1*s)*...*(1-an*s)) Mit G(s) passiert was besonderes, wenn N(s)=0 oder wenn P(s)=0. Besonders besonders ist P(s)=0. Es zeigt sich nämlich, dass P(s) das Systemverhalten im Besonderen beschreibt. In P(s) steckt im Besonderen die Information über die Stabilität des Systems. Die Nullstellen von P(s), also alle ai (i=0,..,n), bestehen als komplexe Zahlen aus einem Realteil und einem Imaginärteil. Nun zeigt sich, dass die Realteile wichtig für die Stabilität sind. Ein Pol (Nullstelle von P(s), ai) mit negativem Realteil beschreibt ein stabiles Teilverhalten. Nur wenn alle Pole von G(s) stabil sind, ist das System stabil. Das heißt, dass die Systemantwort für große Zeiten gegen null (bzw. einen konstanten Wert) geht. Gibt es einen Pol mit positivem Realteil ist die Stabilität nicht gegeben, dann strebt, bei einer kleinen Störung, die Systemantwort für große Zeiten nicht gegen null, sondern wächst theoretisch unendlich an. Wenn man also die Pole in ein 2D-Diagramm mit dem Realteil auf der x-Achse und dem Imaginärteil auf der y-Achse einträgt, liegen alle Pole eines stabilen Systems in der linken Halbebene. Ein Pol auf der rechten Halbebene ist ein Zeichen für Instabilität. Was bedeuten nun die Imaginärteile? Dazu muss man die generelle Lösung einer linearen Differentialgleichung betrachten. Die Lösung der einfachsten linearen Differenzialgleichung a*dx/dt-x(t) = u(t) mit u(t)=0 ist eine e-Funktion y = y0*e^(a*t) Darin ist a der Pol von P(s). Vergl. für a<0 und a>0 mit oben. Ist die DGL nun von höherer Ordnung, kommen mehr Pole hinzu. Es zeigt sich, dass alle Pole mit Imaginärteil als Paar auftauchen. Bei einem Paar ist der Betrag der Realteile gleich und der Betrag der Imaginärteile gleich. Es sind also konjugiert komplexe Zahlen. Die Lösung der Systemgleichung setzt sich also aus e-Funktionen zusammen, die durch konjugiert komplexen Zahlen charakterisiert sind: y = y0*(e^((ar+i*ai)*t) + e^((ar-i*ai)*t)) ... Also wieder mit y = y0*e^( Pol *t). Aus einer Formelsammlung kann man entnehmen: sin(a*t) = e^(i*a*t) - e^(-i*a*t) cos(a*t) = e^(i*a*t) + e^(-i*a*t) Vergleicht man das mit der allgemeinen Lösung von oben, ahnt mann, dass die Lösung eine Schwingung enthält. Man ahnt also, dass der Imaginärteil etwas mit Schwingung zu tun hat. Der Realteil taucht auch auf und scheint wie bei der einfachsten Form der Lösung für das Verhalten bei großem t zuständig zu sein. Es zeigt sich also, dass der Realteil die Stabilität bestimmt und der Imaginärteil die Schwingungsfähigkeit bestimmt. Aus den Gleichungen für sin und cos erkennt man, dass ein großer Imaginärteil eine hohe Frequenz bedeutet. Ein großer Realteil bedeutet schnelles abklingen. Gruss
"An einer Polstelle (bzw. der Grenzfrequenz) gilt
\Im\{{H(s)\}} = \Re{\{H(s)\}}"
Hm... warum das?
Hallo, in meinen Gleichungen sind einige Fehler: Die Systemgleichung lautet korrekt: G(s) = k * ((s+b0)*(s+b1)*...*(s+bm))/((s+a0)*(s+a1)*...*(s+an)) und G(s) = k * N(s)/P(s) mit N(s) = (s+b0)*(s+b1)*...*(s+bm) P(s) = (s+a0)*(s+a1)*...*(s+an) Das Beispiel würde besser heißen: dx(t)/dt + a*x(t) = u(t) mit G(s) = 1/(s+a) und die Lösung für u(t)=0: x(t) = x0* e^(-a*t) mit Pol s1 = -a a > 0: stabil a < 0: instabil Und die sinus und cosinus Funktionen: sin(a*t) = 1/2i * (e^(i*a*t) - e^(-i*a*t)) cos(a*t) = 1/2 * (e^(i*a*t) + e^(-i*a*t)) Hoffentlich ist die Grundaussage trotzdem verständlich geworden. Gruß
Wandert ein Pol/NS nach rechts auf der reellen Achse hat man eine Verstärkung drin (positive relle e-fkt), linke reelle Achse: gedämpft (stabiles System, e^-..t). Bewegt man sich auf der imaginären Achse hoch und runter verändert man die frequenz (komplexe e-fkt)
http://www.amazon.de/Einf%C3%BChrung-die-Halbleiter-Schaltungstechnik-Springer-Lehrbuch/dp/3540340297/ref=pd_bbs_sr_3?ie=UTF8&s=gateway&qid=1200914911&sr=8-3 Hier ist das ganze auch recht gut (3D) erklärt). Achja, und via PN-Diagramm kann man auch Bode-Diagramme zeichnen, weiß aber gerade nicht mehr genau wie das ging, an jedem rechten Pol sinkt der Betragsverlauf um 20dB oder so?!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.