Hi, ich verwende als Motortreiber den L298: http://www.reichelt.de/?;ACTION=7;LA=6;OPEN=1;INDEX=0;FILENAME=A200%252FL298%2523STM.pdf; In dieser Beschaltung: http://www.roboternetz.de/bilder/schaltung298getriebe.gif Die Motorspannung beträgt etwa 24V. Wenn ich die Motoren einzeln ansteuere (also nur ein Motor läuft), funktioniert das Problemlos, links drehen, rechts drehen, ausschalten, bremsen, PWM. Auch wenn beide Motoren sich in die selbe Richtung drehen gibt es noch keine Probleme und der IC bleibt auch bei Belastung relativ kühl. Wenn ich jedoch die beiden Motoren in unterschiedliche Richtungen drehen lasse, wird der IC selbst im Leerlauf schnell heiß. Die Motoren drehen sich auch nur sehr langsam und ich messe eine Motorspannung von etwa 4V. Hat jemand eine Idee an was das liegen könnte? Ich bin im Moment ziemlich ratlos. Vielen Dank Franz
>Hat jemand eine Idee an was das liegen könnte? Ich bin im Moment >ziemlich ratlos. An der Software...
OK, dann hier der in Frage kommende Code: Konstanten:
1 | #define MOT_B_DDR DDRB
|
2 | #define MOT_A_DDR DDRD
|
3 | |
4 | #define MOT_PWM_DDR DDRB
|
5 | |
6 | #define MOT_B_PORT PORTB
|
7 | #define MOT_A_PORT PORTD
|
8 | |
9 | #define MOT_B_OCR OCR1B
|
10 | #define MOT_A_OCR OCR1A
|
11 | |
12 | #define MOT_B_1 PB3
|
13 | #define MOT_B_2 PB2
|
14 | |
15 | #define MOT_B_D1 DDB3
|
16 | #define MOT_B_D2 DDB2
|
17 | |
18 | #define MOT_A_1 PD5
|
19 | #define MOT_A_2 PD4
|
20 | |
21 | #define MOT_A_D1 DDD5
|
22 | #define MOT_A_D2 DDD4
|
23 | |
24 | #define MAX_SPEED_PWM 1023
|
PWM initialisieren:
1 | void init_pwm() |
2 | {
|
3 | cli(); |
4 | |
5 | //Nicht invertierter 10 Bit PWM Timer 1
|
6 | //Zusätzlich (1 << COM1A1) für invertierten Timer
|
7 | TCCR1A |= (1 << COM1A1) | (1 << COM1B1) | (1 << COM1C1) | (1 << WGM11) | (1 << WGM10); |
8 | |
9 | //Timer auf CPU Takt stellen
|
10 | TCCR1B &= ~((1 << CS11) | (1 << CS12)); |
11 | TCCR1B |= (1 << CS10); |
12 | |
13 | //Alle Motoren ausschalten
|
14 | OCR1A = 0; |
15 | OCR1B = 0; |
16 | |
17 | sei(); |
18 | }
|
Motoren initialisieren:
1 | void init_motoren() |
2 | {
|
3 | MOT_A_DDR |= (1 << MOT_A_D1) | (1 << MOT_A_D2); |
4 | MOT_B_DDR |= (1 << MOT_B_D1) | (1 << MOT_B_D2); |
5 | |
6 | //PWM Ports auf Ausgänge stellen
|
7 | MOT_PWM_DDR |= (1 << 5) | (1 << 6); |
8 | |
9 | init_pwm(); |
10 | }
|
PWM-Funktionen:
1 | void mot_a_pwm(uint16_t pwm) |
2 | {
|
3 | cli(); |
4 | MOT_A_OCR = pwm; |
5 | sei(); |
6 | }
|
7 | |
8 | void mot_b_pwm(uint16_t pwm) |
9 | {
|
10 | cli(); |
11 | MOT_B_OCR = pwm; |
12 | sei(); |
13 | }
|
Ansteuerung:
1 | void mot_a_rechts(uint16_t pwm) |
2 | {
|
3 | mot_a_pwm(pwm); |
4 | MOT_A_PORT &= ~(1 << MOT_A_1); |
5 | MOT_A_PORT |= (1 << MOT_A_2); |
6 | }
|
7 | |
8 | void mot_b_links(uint16_t pwm) |
9 | {
|
10 | mot_b_pwm(pwm); |
11 | MOT_B_PORT &= ~(1 << MOT_B_1); |
12 | MOT_B_PORT |= (1 << MOT_B_2); |
13 | }
|
In main:
1 | init_motoren(); |
2 | |
3 | mot_a_rechts(MAX_SPEED_PWM); |
4 | mot_b_links(MAX_SPEED_PWM); |
Ich kann keinerlei Fehler finden :-/
Angehängte Dateien:
-

schaltplan.png
49 KB
{kind=link}
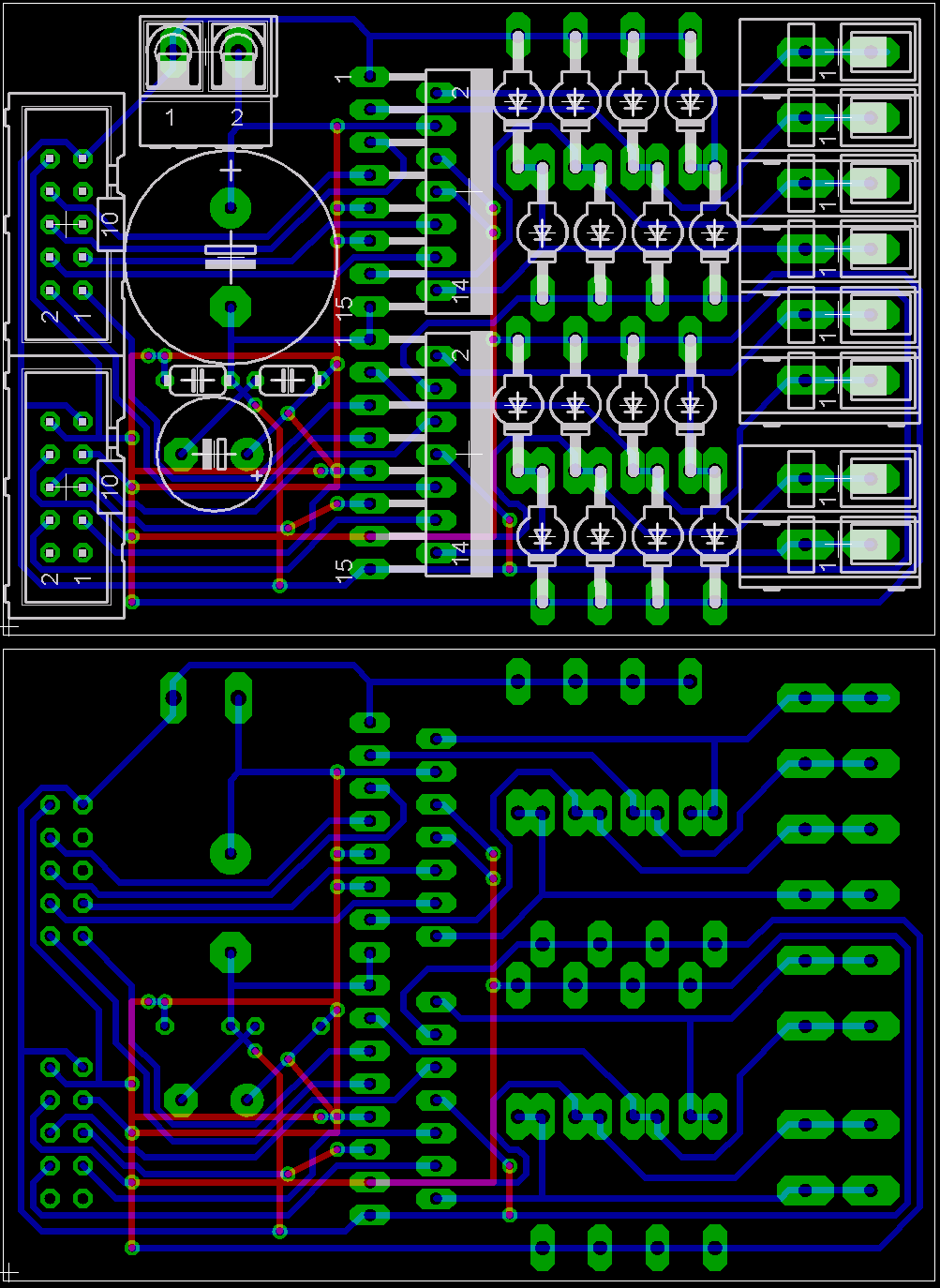
Hi, den eigentlichen Schaltplan habe ich ja oben bereits gepostet (meiner ist lediglich ein Nachbau mit einem anderen Anschluss). Das Board habe ich im Anhang kopiert. Die beiden Motoren A und B sind am unteren Motortreiber angeschlossen. Die roten Linien sind Drahtbrücken. Die Anschlüsse zum µC müssen stimmen, da ja die Einzelsteuerung der Motoren klappt. HTH Franz
Eine Beobachtung habe ich gerade noch gemacht: Die Motoren sind ja mit jeweils 2 Kabel am Motorboard angeschlossen, einer ist bei "voller Fahrt" mit 24V, der andere mit Masse beschaltet. Wenn ich die beiden Motoren nun mit unterschiedlichen Richtungen drehen lasse, fällt ja die Spannung stark ab. Sobald ich aber bei dem einen Motor das Kabel mit 24V entferne, dreht sich der andere Motor wieder normal. Das gleiche wenn ich beim andern Motor das Massekabel entferne dreht sich ersterer Motor normal (jeweils nur das andere Kabel entfernen hilft nicht). Komischerweise dreht sich jedoch der eine Motor, bei dem das Massekabel entfernt wird, trotzdem noch, jedoch nur sehr langsam. Ist das vllt ein Hinweis darauf dass da mit der Verkabelung was nicht stimmt? Die Motoren sind so entstört: http://www.roboternetz.de/wissen/images/3/3a/Entstoerung.gif Als Masse habe ich das Gehäuse der Motoren benutzt. Über eine Alu-Grundplatte sind die Gehäuse leitend miteinander verbunden. Ist das in Ordnung? Übrigens habe ich auch schon versucht die PWM-Steuerung auszukommentieren und die Enable-Leitungen ständig auf Ausgang zu schalten, hat jedoch nichts geholfen. Über weitere Hilfe würde ich mich sehr freuen Franz
{kind=link}
Klemm die Motoren vom L298 ab, und messe ob zwischen den Anschlüssen der beiden Motoren eine Verbindung besteht. Falls ja, dann hast du dein Problem.
@ Franz (Gast) >Komischerweise dreht sich jedoch der eine Motor, bei dem das Massekabel >entfernt wird, trotzdem noch, jedoch nur sehr langsam. Ist das vllt ein >Hinweis darauf dass da mit der Verkabelung was nicht stimmt? Auf jeden Fall! >Als Masse habe ich das Gehäuse der Motoren benutzt. Über eine >Alu-Grundplatte sind die Gehäuse leitend miteinander verbunden. >Ist das in Ordnung? NEIN! Du hast eine H-Brücke. Die Motoren dürfen KEINERLEI Massebzug haben, auch nicht untereinander. Die müssen beide vollkommen isoliert werden! MFG Falk
Oh in der Tat, da scheint was nicht zu passen. Danke für den Tipp, jetzt weiß ich wo ich nach dem Fehler zu suchen habe :)
Ich wei ja nicht, was du für Motoren verwendest. Aber ich habe mal bei einigen Typen herausgefunden, dass die intern zwischen beiden Anschlüssen einen kleinen Entstörkondensator (zwischen den beiden Anschlüssen)) hatten. Den musste ich herauslöten, erst dann war ein ordentlichen "dimmen" per PWM möglich.
Der Kondensator ist zur Entstörung gedacht, damit dein Mikrocontroller (und was sich noch so in näherer Umgebung zu deinem Motor) nicht gelegentlich aufhängt und von vorn anfängt. Ein Schaltplan für den kompletten Aufbau könnte helfen, den Fehler zu finden...
Das stimmt schon, aber der Kondensator hat meine PWM vermurkst und mit der Induktivität des Motors einen Schwingkreis gebildet. Der Motor war ja unsprünglich nur dazu da, an echter Gleichspannung betrieben zu werden...
Danke für eure Hilfe. Das Problem lag eben daran, dass einer der beiden Motorenanschlüsse mit dem Gehäuse verbunden ist, naja und wenn die Gehäuse untereinander verbunden sind gibt es eben bei unterschiedlicher Polung einen Kurzschluss (anscheinend war die Verbindung nicht sehr gut, 50 Ohm Widerstand etwa, drum ist nicht mher passiert). Konnte zum Glück heute noch Plastikschrauben auftreiben, so haben die Motoren keinen leitenden Kontakt mehr zur Grundplatte und das Problem ist gelöst. Eine erfolgreiche Woche Franz
>Konnte zum Glück heute noch Plastikschrauben auftreiben, so haben die >Motoren keinen leitenden Kontakt mehr zur Grundplatte und das Problem >ist gelöst. Ich würde dir eher raten, die Verbindung Motoranschluss-Gehäuse zu trennen und das Gehäuse auf GND zu legen. Ein Gehäuse, das mit ner PWM betrieben wird, zieht sehr hohe Ströme beim Schalten und bildet eine gute Antenne...
Oh man ich habe gedacht eine Leitung ist von Haus aus (durch den Hersteller) mit dem Gehäuse verbunden. Nach deinem Hinwe (lippy) habe ich gerade an einem ausgebauten Motor festgestellt, das das gar nicht der Fall ist. D.h. da ist nur irgendwo die Isolierung der Anschlüsse an den Motoren gerissen. Nun ja, für die Präsentation morgen spielt das wohl keine Rolle :) Grüße Franz
>Nun ja, für die Präsentation morgen spielt das wohl keine Rolle :)
Ein zukünftier Messemuster-Bauer...
Viel Erfolg!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.