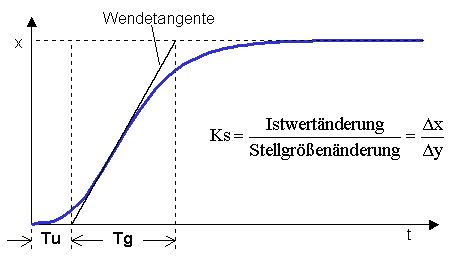
Hallo! Ich beschäftige mich zur Zeit mit Regelungstechnik und hätte da eine Verständnisfrage. Ist es richtig, dass ein großes Verhältnis von Tg/Tu zu einer guten Regelbarkeit führt, ein kleines zu einer schlechten Regelbarkeit? Freue mich über jegliche konstruktive Antwort
Geh erst auf roboternetz.de und gib dann den Link im Browser ein - die Website wertet den Referrer aus.
Angehängte Dateien:
-

Tu_Tg.gif
3,8 KB
{kind=link}
{kind=link}
Aha. Und was ist das fuer eine Kurve ? Die Openloop Schrittantwort ? Die Closed Loop Schrittantwort? Da wo die Wendetangente schneidet ... ein recht akademischer Furz. Das muesste man nun fuer diverse Systeme mal ein wenig durchrechnen um ein Gefuehl dafuer zu beokommen. Von einer generellen Aussage ist man dann noch ein Stueck weg.
>>Aha. Und was ist das fuer eine Kurve ? Die Openloop Schrittantwort ? Die >>Closed Loop Schrittantwort? Da wo die Wendetangente schneidet ... ein >>recht akademischer Furz. Das muesste man nun fuer diverse Systeme mal >>ein wenig durchrechnen um ein Gefuehl dafuer zu beokommen. Von einer >>generellen Aussage ist man dann noch ein Stueck weg. Aber irgendwelche Kriterien für die Regelbarkeit muss es doch geben oder nicht?
Ja. Verzoegerungen sind immer schlecht. Je laenger, desto schlechter. Als Skalierung kann die Grenzfrequenz des Systems dienen. Die Verzoegerung ist um so schlechter je laenger sie in Bezug auf die Grenzfrequenz wird. Dies, da die Openloop Verstaerkung bei 180Grad Phase kleiner als Eins sein muss. Das bedeutet, dass man die Verstaerkung wegen der Verzoegerung zuruecknehmen muss und nur einen langsamen Integrator nehmen darf.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.