Hallo zusammen, ich bin derzeit dabei eine Raumzeigermodulation zu machen. Ich habe verstanden das die Elementarvektoren über das Tastverhältnis der PWM Frequenz zum Sollvektor , vektoriell addiert werden. Allerdings habe ich das ganze so vertsanden dass in einem Sektor nur ein Sollvektor geschaltet ist. Wenn jetzt aber die die PWM Frequenz z.B. 100mal höher ist wie Kreisfrequenz dann verschalte ich doch in einem Sektor mehrmals die Elemntarvektoren zu einem Sollvektor ( bei gleichem Tastverhältnis immer den gleichen Sollvektor ). Kann mir da jemand bei meinen Gedankengängen weiterhelfen ? Danke für eure Hilfe ! Amper
Wenn Du das ganze kartesisch machen sollst/willst nimmst Du einen PWM Kanal für die X-Achse und den anderen für die Y-Achse. Das PWM-Ausgangssignal wird dann mit einem Tiefpass gefiltert. Dessen Grenzfrequenz muss weit unter der PWM-Frequenz liegen. Damit erhält man am Ausgang des Tiefpass eine Spannung die dem arithmetischen Mittelwert des PWM-Signales entspricht und somit proportional zu dem Tastverhältnis ist. (Das ist das Grundprinzip der D/A-Wandlung mit einem PWM-Generator) Nun hat man zwei Größen (Spannungen) deren Amplitude man beliebig regeln kann und wenn man diese eben als kartesisches Koordinatensystem (Elementarvektoren) auffasst, kann man damit dann den Zeiger rotieren, Pirouetten drehen, im Rechteck springen und Purzelbäume schlagen lassen. Wenn Du das alles eigentlich gar nicht wissen wolltest müsstest Du entweder mal die tatsächliche Anwendung beschreiben oder in einer Skizze Dein Vokabular von Sollvektor, Elementarvektor, Sektor näher erläutern. Denn ich kann mir durchaus denken was Du damit meinst. weiß ja aber nicht ob das das Selbe ist, was Du meintest. Viele Grüße, Martin L.
Hallo Martin, das was du sagtes ist mir durchaus klar, dass ich aus zwei PWM Kanälen eine beliebe Größe des Kartesischen Systems bilden kann. Mein Frage ziehlte ürsprünglich darauf ab, erstens woher kommt die Drehbewegung des Sollzeigers und zweitens habe ich doch mehrere Sollvektoren bei einer PWM Frequenz die höher liegt als die Winkelgeschwindigkeit des anzusteurenden Motors. Nähere Erläuterung : Wenn ich her gehe und in der mitte des ersten Sektors (also bei 30Grad ) einen Sollzeiger berechne benötige ich die Verhältnisse der Einschaltzeiten (der Elementar Vektoren)zur Abtastzeit . Verhältnis = 33,333 Gehe ich nun her und mache diesen Vorgang in jedem Sektor dann erhalte ich doch keine Kreisbewegung. Also ist die PWM Frequenz / Abtastzeit banal gesagt für die Kreisbewegung des Sollzeigers zuständig. Ist Das Richtig ? Auf der anderen Seite wenn ich die Berechnung der Kreisbewegung mit Hilfe der im Sektor liegenden Winkel berechne erhalte ich ein Signal das bei 0Grad 50% Tastverhältnis aufweist und bei 60Grad ein Tastverhältnis von 0%. Und diese Tatsache verwirrt mich etwas !
Hallo Alexander Alexander S. wrote: > und zweitens habe ich doch mehrere > Sollvektoren bei einer PWM Frequenz die höher liegt als die > Winkelgeschwindigkeit des anzusteurenden Motors. Hast Du wirklich mehrere Sollvektoren? Dann brauchst Du für jeden Vektor zwei PWM-Ausgänge. Oder meinst Du, dass der Sollvektor nicht nur einen Kreis beschreibt sondern sowas Blumenartiges was entsteht wenn der Real und Imaginärteil nicht rein Harmonisch sind sondern noch entsprechende Oberwellenanteile haben? (Irgendwie klingt die Aufgabe für mich nach - wir simulieren für einen xyz-Motor ein Stromnetz) > Wenn ich her gehe und in der mitte des ersten Sektors (also bei 30Grad ) Die "Mitte" vom ersten Sektor wäre bei mir ja bei 45° - aber das ist ja egal. > einen Sollzeiger berechne benötige ich die Verhältnisse der > Einschaltzeiten > (der Elementar Vektoren)zur Abtastzeit . > Verhältnis = 33,333 Wie kommst Du darauf? Wenn S_=x+j*y mein Sollzeiger ist, sind bei w=30°=PI/6 x=.87 und y=.5. (Den Radius habe ich o.E.d.A. mal auf r=1 festgelegt) Die Tastverhältnisse der beiden PWM-Einheiten sind direkt Proportional zu den Ausgangsgröße. Somit gilt für die beiden Taktverhältnisse t1 und t2 x=c*t1 y=c*t2 Für r=1 ist c=1. Damit ist t1=sqrt(3)/2 und t2=1/2. Das Verhältnis beider zueinander ist dann sqrt(3) bzw. der Kehrwert. > Gehe ich nun her und mache diesen Vorgang in jedem Sektor dann erhalte > ich doch keine Kreisbewegung. Die (abgetastete) Kreisbewegung erhältst Du, wenn Du den Winkel zu jedem Abtastzeitpunkt um ein entsprechendes (konstantes) Phaseninkrement erhöhst. Damit es am Ende eine kontinuierliche Kreisbewegung wird musst Du noch einen weiteren Tiefpassfilter dahinter schalten. Es gibt natürlich erst mal ein Problem wenn Du ausserhalb vom 1. Sektor bist weil der PWM-Generator mit Tiefpassfilter idR. keine negativen Ausgangsspannungn erzeugen kann. Aber man kann den Ursprung des Koordinatensystem ja verschieben (z.B. auf 1;1) und die maximale Länge des Vektors begrenzen. (z.B. auf sqrt(2)) > Also ist die PWM Frequenz / Abtastzeit > banal gesagt für die Kreisbewegung des Sollzeigers zuständig. > Ist Das Richtig ? Nein. Ich glaube es wäre gut wenn Du Dir die PWM-Sache erst mal komplett wegdenkst und (in Gedanken) durch ganz normale D/A-Wandler ersetzt. Denen gibst Du einen digitalen Wert vor und sie geben Dir eine entsprechend proportionale Spannung aus. > Auf der anderen Seite wenn ich die Berechnung der Kreisbewegung mit > Hilfe der im Sektor liegenden Winkel berechne erhalte ich ein Signal das > bei 0Grad 50% Tastverhältnis aufweist und bei 60Grad ein Tastverhältnis > von 0%. Bei einem Tastverhältnis von 0 ist die Ausgangsspannung des einen PWM-Generators 0V. Somit bekommt man, je nachdem wie man es definiert, entweder einen Vektor mit 0° oder einen mit 90° weil eine Komponente ja 0 sein muss. Viele Grüße, Martin L.
Angehängte Dateien:
-

Vektorskizze.jpg
170 KB
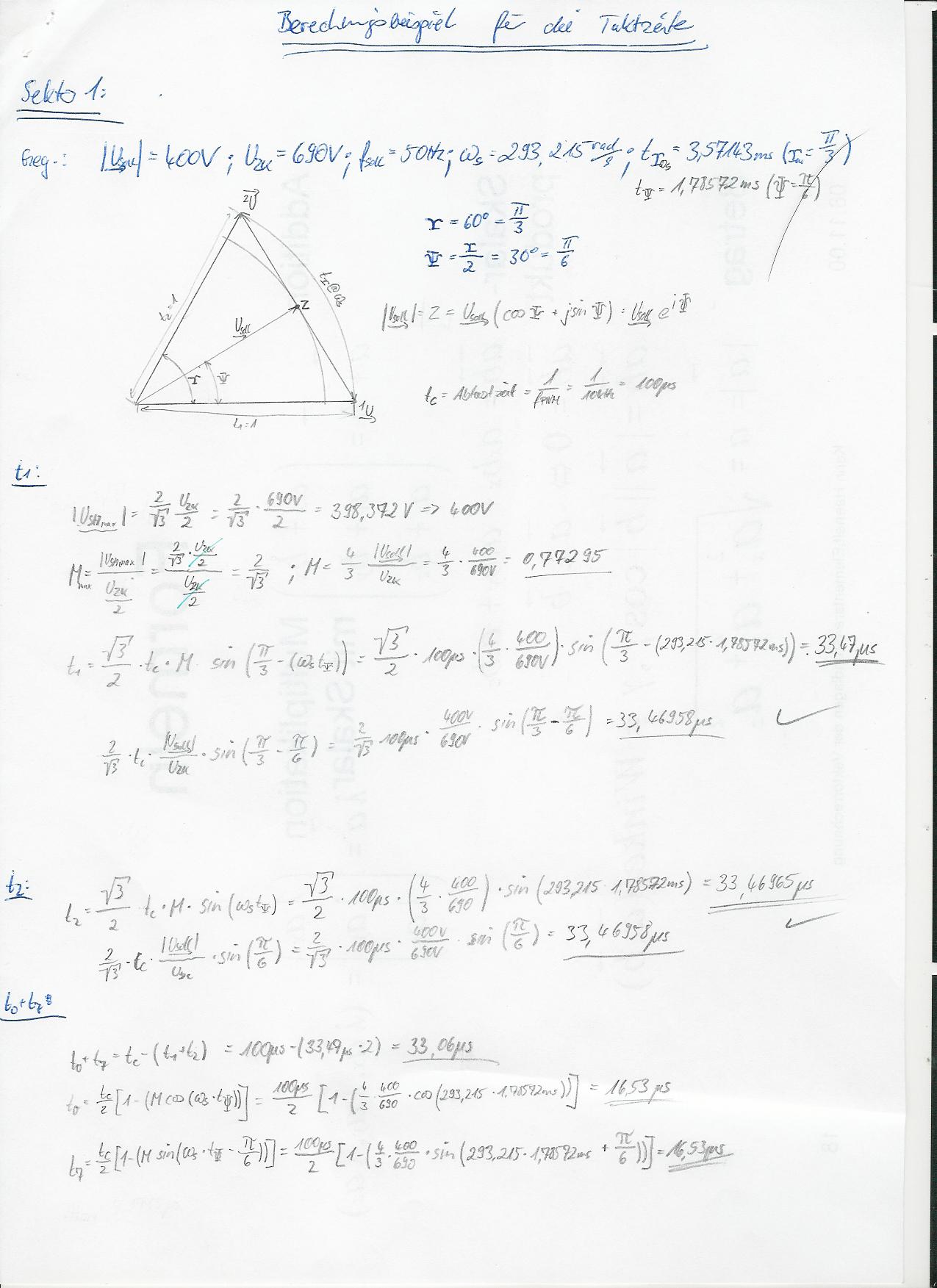
Hallo Martin, erst einmal danke für Deine Geduld. Grundlegend geht es um die Ansterung eines Drehstromasynchronmotors. Ich habe jetzt mal meine berechnung mit einer Zeichnung des ersten Sektors angehängt. Ich bin etwas irritiert was die Sektor bestimmung angeht wie kommst du den auf 45° ? Ich habe doch doch eine Sechseck also 360°/6 = 60° und aus diesem Sechseck resultieren 6 Elementar Vektoren mit zwei Null Vektoren. Zur info meine grundlage ist folgende http://ww1.microchip.com/downloads/en/AppNotes/00955a.pdf Sorry meine Schuld das Verhältnis 0,333 und nicht 33,333. Waren die Finger ausnahmsweise mal schneller wie der Kopf. In der angehängeten Zeichnung beschreibt "t@ws" die Zeit die der Rotor ,bei einer Winkelgeschwindigkeit von 293,215 rad/s, benötigt um einen Winkel von 60° zurück zu legen. Ich werde das von Dir erläuterte mal versuchen um zusetzen und werde meine ergebnisse dann wieder hier posten. Nochmals Danke für deine Geduld Gruß Alex
Hallo Alexander, du hattest nichts von dreiphasigem Sinus erwähnt - vielleicht war das der Knackpunkt? Wo liegt eigentlich dein Problem; In der Theorie an sich, oder in der praktischen Umsetzung? Gruß Christian
Du hast tatsächlich nicht erwähnt, dass es Dir um ein dreiphasiges System geht. Ich ging immer von einem zweiphasigen, einem orthogonalen aus. (Weswegen ich auch fragte ob Deine Einheitsvektoren im kartesischen Korrdinatensystem liegen was sie ja nicht tun. Hier hast Du kein orthogonales Koordinatensystem mehr weswegen das alles etwas unintuitiver wird ;)) Ich habe gerade das Dokument überflogen und schreib gegen Abend noch was - zumal ich jetzt verstehe was Du eigentlich willst und wohl auch, was Dein Problem ist. Viele Grüße, Martin L.
Hallo Martin, nach deinen ausführlichen erklärungen habe ich also das ganze mal grob durchgerechnet und es funktioniert und viel wichtiger ich habe verstanden was zu machen ist. Nochmals danke für deine Geduld und Hilfe Alex
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.