Hi, an diversen Stellen im Netz findet man das gleiche Modell für ein Kalmanfilter, das den Drift des Gyros schätzen soll (zb hier http://blog.tkjelectronics.dk/2012/09/a-practical-approach-to-kalman-filter-and-how-to-implement-it/). Ich habe das Filter in matlab nachgebaut und "drehe" mein virtuelles Objekt. Dabei wird zwar der Winkel ganz gut geschätzt, jedoch liegt die Schätzung des Drifts meilenweit daneben. Ich habe im Code den Drift konstant auf 0.01 gesetzt, das KF kann jedoch den Drift und die Winkelgeschwindigkeit nicht auseinanderhalten. Habe ich beim Abtippen irgend etwas übersehen? Oder ist das Modell grundsätzlich falsch? Weiterhin ist mir noch nicht ganz klar, wie ich das Prozessrauschen des Drifts modelliere. Was kommt richtigerweise bei q22 rein und warum? Bisher habe ich das so verstanden, dass dort die Unsicherheit des Modells reinkommt. Beim vorhandenen Modell gibt es aber keine Gleichung für den Drift, daher bin ich etwas ratlos.
Angehängte Dateien:
-

Zwischenablage01.png
32 KB
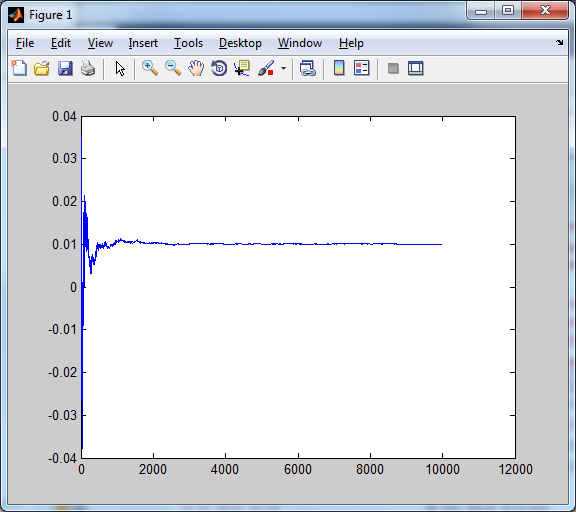
Hallo Marcel, die Schätzung der Gyrodrift klappt schon, siehe anhängendes Bild. Dein Modell paßte nicht zu der Berechnung der Ausgangsgröße. Ich habe Dir nen File angehängt, das funzt, vergleich das mit Deinen Berechnungen. Dein Modell ist nen Integrierer, der ist instabil, das mag Kalman oft nicht so gerne. math rulez! Cheers Detlef
Ach, ich hatte noch ein dt vergessen an die Gyro-Werte heran zu multiplizieren. Jetzt sieht es gut aus. Noch ne prinzipielle Frage: Ich finde verschiedene Kalmangleichungen, worin bestehen die Unterschiede? A: K = A*P*C'*inv(S); P = A*P*A' + Q - A*P*C'*inv(R)*C*P*A'; B: K = P*C'*inv(S); P = A*P*A' + Q; Und was hat es bei Matrizenrechnung allgemein mit A*B*A' auf sich? So etwas sieht man ziemlich oft, dass eine Matrix B von links mit A und von rechts mit A' multipliziert wird. (Das Hochkomma ist die Matlabschreibweise der Transponierten)
Hi, >>Ich finde verschiedene Kalmangleichungen, worin bestehen die Unterschiede? Ich hatte in Deinem Code rumgefuscht, weiß nicht mehr genau, was wie und wo klemmte, kann das nicht mehr nachvollziehen. Unten hab ich funzenden Kalman Code angehängt, den hatte ich in Beitrag "Amplitude und Phase einer festen Frequenz bestimmen." mal gepostet. Der orientiert sich an 'Anwendungen der Kalman Filter Technik, Schrick Herausgeber, Oldenburg Verlag 1977' >>Und was hat es bei Matrizenrechnung allgemein mit A*B*A' auf sich? Das heißt bei Mathematikern 'quadratische Form' afaik. Auf jeden Fall macht Dir A*B*A' eine Matrix aus (gemischt-)quadratischen Polynomen der Elemente von A mit den Elementen von B als Koeffizienten. Sowas taucht immer dann auf, wenn man einen Fehler minimieren will z.B. bei Kalman. hth Cheers Detlef for k = 1:n, PS = A*P*A'+Q; K = PS*C'*inv(C*PS*C'+R); P = (eye(2)-K*C); P = P*PS*P'+K*R*K'; xds=A*xd; xd = xds+K*(y(k) -C*xds); end;
Es gibt verschiedene Darstellungsformen. ZB Joseph's Form Bedeuten aber das gleiche.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.