Freunde upton’scher Prozessrechner dürfen sich an einer neuen Betriebssystem-Version erfreuen, die auf Debian Bullseye basiert. Quasi nebenbei schaltet man Leistungsreserven in manchen Raspberry Pi 4-Varianten frei, während das Team um Bryan Costanich ihre .net-Ausführungsumgebung um Debugging-Möglichkeiten erweitert.
Worum geht es hier?
Nutzer der Raspberry Pi-Familie fahren die Einplatinenrechner normalerweise unter Rasbpian: einem von Debian abgeleiteten Betriebssystem, das für den Prozessrechnerbetrieb vorgesehene Erweiterungen mitbringt. Die zugrundeliegende Debian-Variante erhielt nun ein Update. Außerdem gibt es bei manchen Raspberry 4-Varianten nun ein Sonderregime mit höherer Prozessorleistung, zu guter letzt gibt es im Hause Meadow - dabei handelt es sich um ein System, das in .net gehaltenen Code auf ESP32-artigen Modulen ausführt - neue Funktionen und einen Debugger.
Debian Bullseye als Basis für Rasbpian
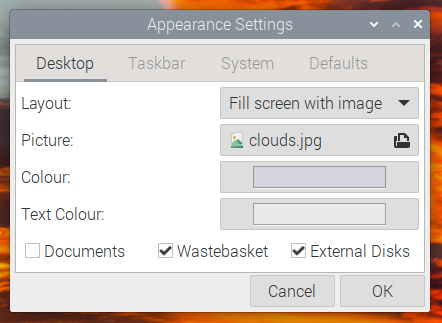
Die mit Abstand „wichtigste“ Änderung für durchschnittliche Anwender dürfte sein, dass die neue Version von Debian auf das GTK-Toolkit in dritter Version setzt: Dies führt laut Aussagen der Raspberry Pi Foundation zu „Änderungen am Look and Feel“, die insbesondere bei technischen herausgeforderten Benutzern zu Umlern-Aufwand führen. Als Paradebeispiel präsentiert die Raspberry Pi Foundation dabei das in der Abbildung gezeigte Einstellungsfenster - man möge das Aussehen des Tabbar-Steuerelements beachten.
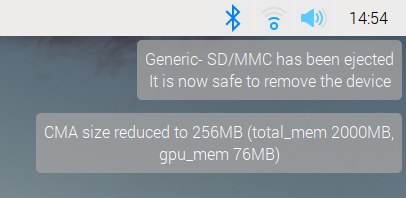
Auf Raspberry Pis mit mindestens 2 GB RAM findet ein Austausch des Window Managers statt - neuartige Prozessrechner nutzen fortan Mutter, was zu „weicheren“ Animationen, aber auch einem etwas anderen Aussehen des Benutzerinterfaces führt. Auf „kleineren“ Varianten des Raspberry Pi kommt nach wie vor openbox zum Einsatz, die nun aber keine runden Tooltips mehr darstellen kann. Ein weiterer „Nebeneffekt“ der Umstellungen ist, dass Notifications und Ereignisse fortan - wie in der Abbildung gezeigt - gebündelt in der oberen rechten Ecke des Bildschirms aufscheinen.
Kamera-Änderungen, ante Portas
Der Kamera-Port dürfte bei vielen MSR-Anwendungen brach liegen: Insbesondere im Bereich Machine-Learning hat sich die Raspberry Pi-Kamera allerdings als Quasistandard etabliert. Mit der neuen Version von Rasbpian „ändert“ sich der verwendete Treiber - statt dem bisher von Ebenezer Upton’s Mannen hausintern entwickelten Driver kommt nun die libcamera zum Einsatz. Dies dürfte zu massiven Umstellungen führen - in Ankündigungsposts findet sich derzeit nur folgender, lapidarer Verweis:
1 |
. . . |
2 |
|
3 |
For anyone who has written camera-based applications in the past, this is a very significant change, and is too large to be covered here. |
4 |
|
5 |
. . . |
Zum Zeitpunkt der Drucklegung bietet die Raspberry Pi Foundation übrigens noch keinen Weg an, um Images auf die neue Version zu migrieren. Über die Stabilität findet sich ebenfalls nichts wirklich Positives - der im Allgemeinen gut informierte Newsdienst CNX-Software berichtet nach folgendem Schema von Stabilitätsproblemen im Zusammenhang mit der hauseigenen Benchmark-Suite:
1 |
. . . |
2 |
|
3 |
It got stuck here like forever, so I tried to access the desktop without luck, and I was unable to initiate another SSH terminal or terminate sbc-bench.sh. I power cycled the board, and tried again, and I got the exact same results. |
4 |
So I would not recommend upgrading a production machine right now, or you’d better perform some testing first. |
5 |
|
6 |
. . . |
7 |
|
8 |
Via https://www.cnx-software.com/2021/11/08/raspberry-pi-os-upgraded-to-debian-11-bullseye/ |
Mehr Übertaktungsspielraum beim Raspberry Pi 4
Eines der „lustigsten“ Entgegenkommen an Spielkinder ist seit jeher, dass sich Prozessoren der Raspberry Pi-Reihe - je nach Modell, aber auch je nach Exemplar - mehr oder weniger stark übertakten lassen. Besitzer mancher Varianten des Raspberry Pi 4 - spezifischerweise alle mit 8 GB RAM, und einige 2- und 4 GB-Varianten mit den in der Abbildung gezeigten Topologie des Schaltreglers - dürfen sich ab sofort über eine „höhere“ obere Grenzfrequenz freuen.
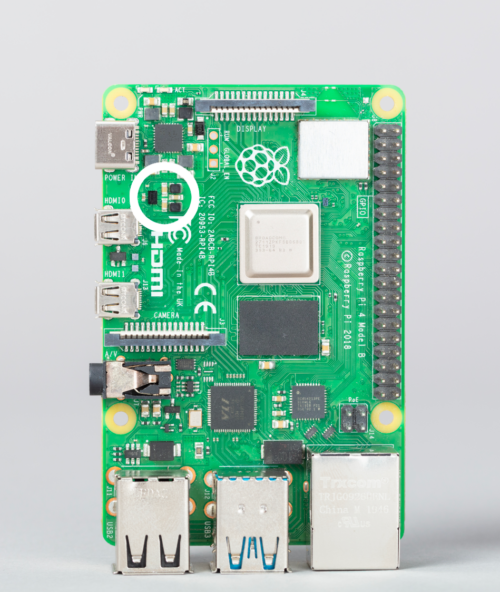
So ihr Raspberry Pi 4 die in der Abbildung gezeigte Topologie aufweist, ist die maximale Taktfrequenz des Hauptprozessors fortan bei sportlichen 1,8 GHz. Die Raspberry Pi Foundation betont allerdings, dass auch ältere Schaltträger Topologien - im Allgemeinen - mit der höheren Grenzfrequenz zurecht kommen. Zur „Anpassung“ bzw. Freischaltung reicht es aus, die Konfigurationsdatei config.txt nach folgendem Schema zu adaptieren:
1 |
arm_freq=1800 |
In manchen Fällen ist zusätzlich Overvolting erforderlich: Weitere Informationen hierzu finden sich unter der URL https://www.raspberrypi.com/news/bullseye-bonus-1-8ghz-raspberry-pi-4/.
Meadow F7: Debugging mit Visual Studio Code
Zu guter Letzt steht die Version B6.0 von Bryan Costanichs .net-Ausführungsumgebung zur Verfügung. Die wichtigste Neuerung dieses Releases ist ein Debugger, der im Moment nur mit Visual Studio Code funktioniert.
Zur „effizienteren Realisierung“ verteilter Systeme enthält das Costanichsche Betriebssystem fortan Unterstützung NTP: der Meadow F7 kann seine Systemzeit von einem oder mehreren Zeitservern beziehen. Außerdem gibt es - wie immer - “ Optimierungen im Hintergrund“. Erstens wurde die .net Standard-Einbindung „bereinigt“, was bei der Nutzung mancher NuGet-Bibliotheken auftretende Probleme beseitigte. Außerdem wurde die bisher „manuell“ anzufordern Coprocessor-Instanz automatisiert - Ausrufe der folgenden drei Methoden sind bei der Kommunikation mit dem als Netzwerkkarte dienenden ESP32 nun - im Allgemeinen - nicht mehr notwendig:
1 |
InitCoprocessor() |
2 |
InitWiFiAdapater() |
3 |
InitBluetoothAdapter() |
Wie bei fast allen „großen“ Updates gilt auch hier, dass die Aktualisierung einer vorhandenen Madow-Arbeitsumgebung ein sogenanntes „Full Stack Update“ voraussetzt - neben dem eigentlichen Betriebssystem des Prozessrechners müssen Sie auch die NuGet-Pakete, die CLI und die Visual Studio-Erweiterungen aktualisieren. Weitere Informationen finden sich im unter http://developer.wildernesslabs.co/Meadow/Release_Notes/Beta6/ bereitstehenden Change Log.