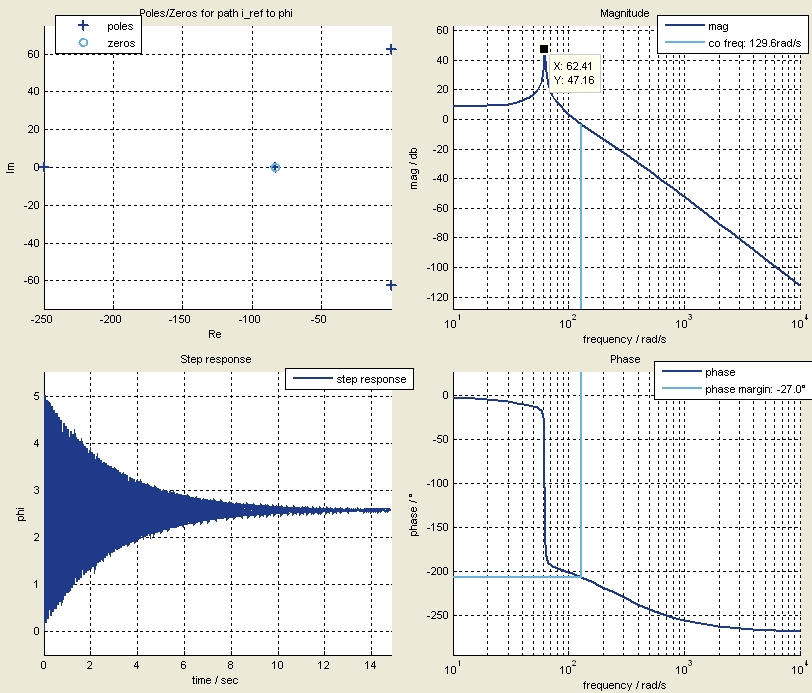
Hallo zusammen, langsam verzweifle ich. Folgendes habe ich bisher getan: ich habe ein kleines mechatronisches System modelliert (DC-Motor mit einem Trägheits- und Reibmoment als Last und einer Rückholfeder). Das ganze soll geregelt werden. Ich habe mich jetzt für eine Kaskadenstruktur entschieden: Ein unterlagerter Stromrelger als PI-Regler (Polstellenkompensation) und darüber soll dann der Lageregler arbeiten. Und darin liegt auch mein Problem: Ich habe nach bestem Gewissen verschiedene Verfahren angewandt, aber komme einfach nicht zu einem brauchbaren Ergebnis. Bin mir schon nicht sicher, ob es ein PI- oder PID-Regler oder gar war anderes werden soll. Habe es mit beiden Typen nach dem symmetrischen Optimum und auch mit der Polstellenkompensation versucht, aber da kommt nur Mist raus. Deswegen die Frage an euch: wie würdet ihr das ganze angehen? Meine Regelstrecke habe ich im Zustandsraum definiert. 2 Eingänge: Uk als Klemmspannung und Fload als Lastkraft, wobei die sowieso erstmal 0 ist, und 3 Ausgänge: den Strom, die Drehzahl und den Winkel. Im Anhang habe ich eine kleine Analyse meiner Regelstrecke für den Lageregler hinterlegt: Also mein bereits Stromgeregeltes Modell, dass auf dem Pfad I_soll (Ausgang des Lagereglers) nach Phi (also dem Winkel) untersucht wurde. Zu sehen sind die Pol-Nullstellen-Karte, das Bode-Diagramm (Amplitude/Phase) und die Sprungantwort. Helft mir bitte!! :-) MfG, Barto Achja, ich gebe gerne alle benötigten Daten an!
Angehängte Dateien:
-

lti_char_curr_ctrl_plant.jpg
370 KB
Ja oftmals wird das so gemacht, allerdings muss in meinem Fall nicht die Drehzahl begrenzt werden, da der Motor später nur im einem Winkel bis 90 Grad arbeitet. Somit kann man die unterlagerte Drehzahlregelung auch weglassen...
Warum sollte der (gewünschte) Drehwinkel des Motors irgendeinen Einfluss auf die Auslegung des Reglers haben? Entweder ist der Drehzahlregler hilfreich umd das System zu stabilisieren, oder er ist es nicht. Das hat aber nichts damit zu tun, wie weit der Motor drehen soll. Mit freundlichen Grüßen Thorsten Ostermann
Hi Thorsten, ich habe es so beigebracht bekommen, dass man die unterlagerten Kaskaden letzlich zur Bergrenzung der jeweiligen Größen verwendet. Um den Motor nicht so überlasten wird beispielsweise der Strom mit der innersten Kaskade begrenzt. Mir wurde auch gesagt, dass ich die Drehzalregelung auslassen kann, da keine Begrenzung verlangt wird. Näher kann ich es leider nicht begründen, arbeite mich derzeit in das Thema ein...
Angehängte Dateien:
-

AX5000_Vregler.png
9,7 KB
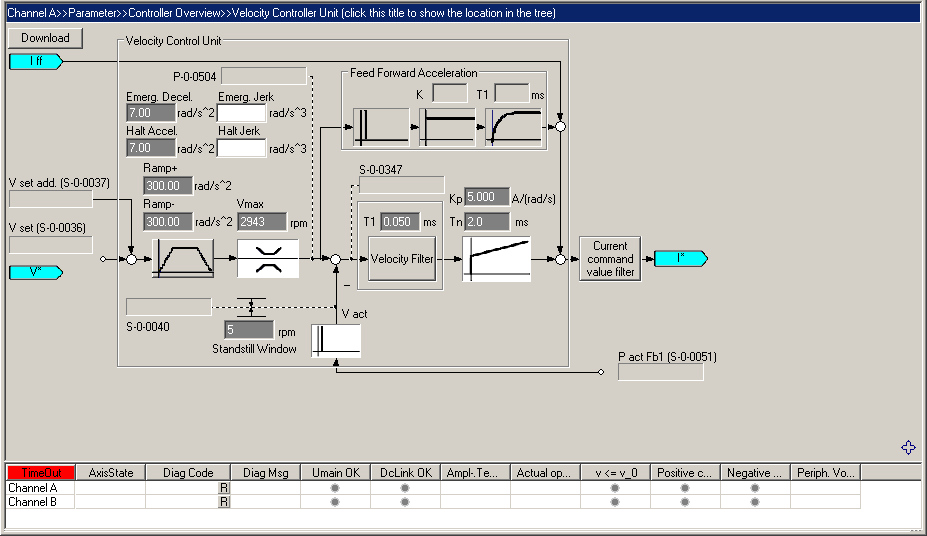
Der Drehzahlregler begrenzt aber nicht. Bei einem Sollwertsprung am Eingang oder einem zu weit aufgedrehten Lageregler würde auch der Drehzahlregler einen zu großen Ausgangswert liefern. Wenn man Stellgrößenbeschränkungen benötigt, werden die i.d.R. auch als solche zusätzlich eingebaut. Ich habe dir mal ein Blockschaltbild des Geschwindigkeitsreglers aus einem kommerziellen Servoregler angehängt (Beckhoff AX5000). Vor dem eigentlichen Drehzahlregler kommt eine Rampe (zum Verschleifen von Sprüngen), dann die Stellgrößenbeschränkung und noch ein Geschwindigkeitsfilter. Ich fand es damals in meiner Diplomarbeit sehr hilfreich, mich zunächst an kommerziell eingesetzen Lösungen zu orientieren (damals Sinumerik 611D). Mit freundlichen Grüßen Thorsten Ostermann
Okay, verstehe. Aber es muss doch auch ohne gehen, oder? Ich habe, bevor ich den Lageregler entwerfen wollte, auch mal mit dem Drehzahlregler begonnen...da bekam ich auch nie gescheite Ergebnisse. Erst dann hieß es: Hey den Drehzahlregler brauchst du nicht. Deswegen probiere ich es jetzt ohne... Was ich ja doch jetzt habe ist ne PT3-Strecke, von der 2 Polstellen konjugiert komplex sind... Habe mal probiert diese zwei Polstellen mit den Nullstellen vom PID-Regler zu kompensieren...ne stationäre Genauigkeit erreiche ich zwar, aber nicht hinreichend schnell oder mit zu langem überlagertem Schwingen.
Die Aufgabe des unterlagerten Drehzahlreglers wäre genau das, nämlich das System schneller zu machen. Für den Anfang würde ich aber erst einmal den vorhandenen Regler stabil einstellen. Google mal nach Stabilitätskriterium oder Phasenreserve. Bei -180° Phase sollte die Amplitude < 0dB sein, sonst ist das System nicht stabil. Laut deinem Bodediagramm bist du hart am Stabilitätsrand, wenn nicht sogar drüber. Mit freundlichen Grüßen Thorsten Ostermann
Die von mir hochgeladenen Plots beziehen sich alle auf den Pfad Eingang Stromregler nach phi. Muss ich diese Ergebnisse etwa auch in Betracht ziehen, wenn ich meinen Stromregler auslege? Bin dabei jetzt nur vom Pfad Uk, also Klemmspannung des Motors (=Stellgröße des Stromreglers), nach i ausgegangen. Wenn man diese Charakteristiken plottet erhält man aufgrund der kompensierten Polstelle ein PT1-Verhalten und somit immer stabiles Verhalten. Wohl gemerkt nur für den einen Pfad....möchte den Pfad nach phi betrachten, dann kommen 2 konjugiert komplexe Pole dazu und das ganze System wird instabil, das stimmt...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.