
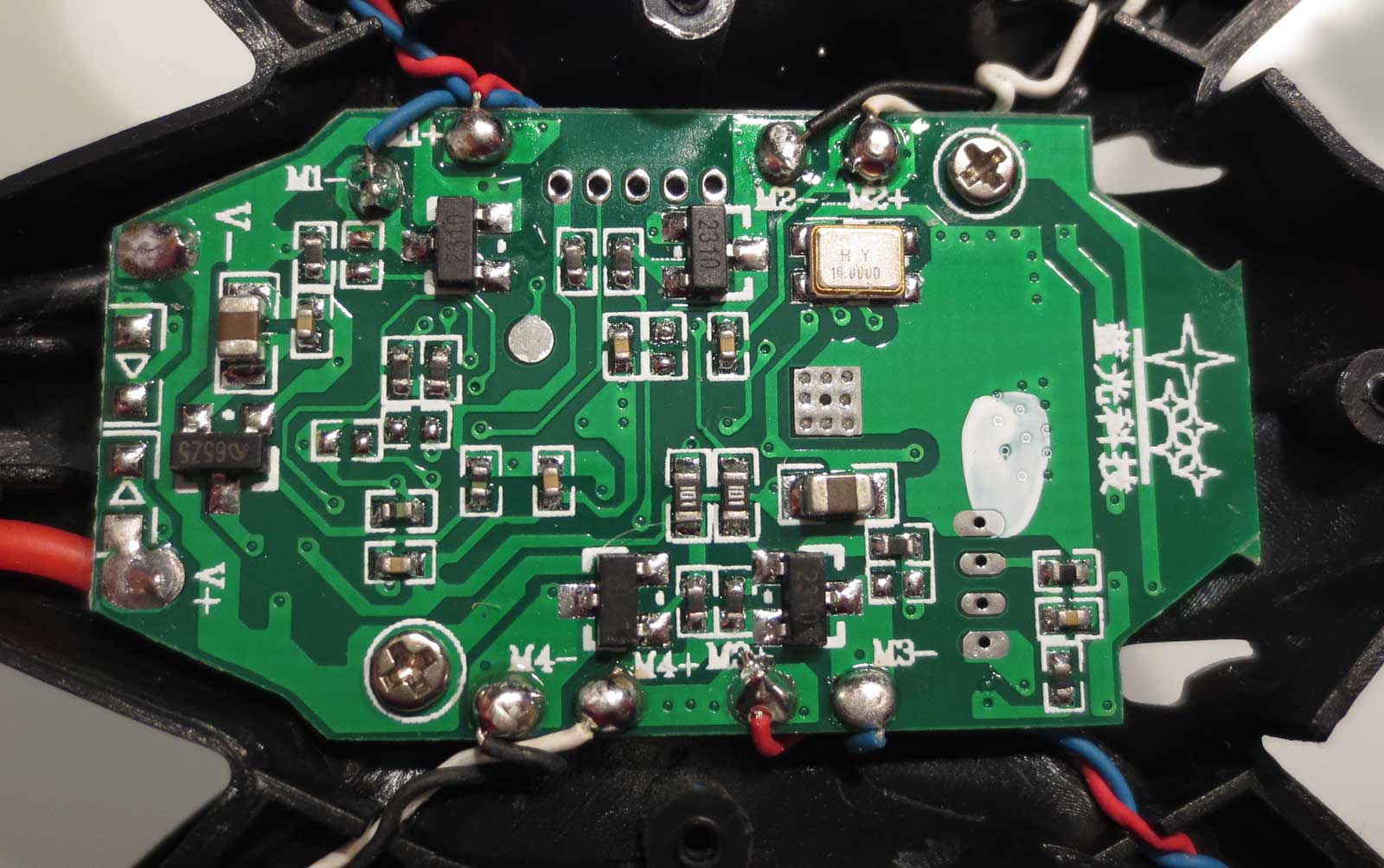
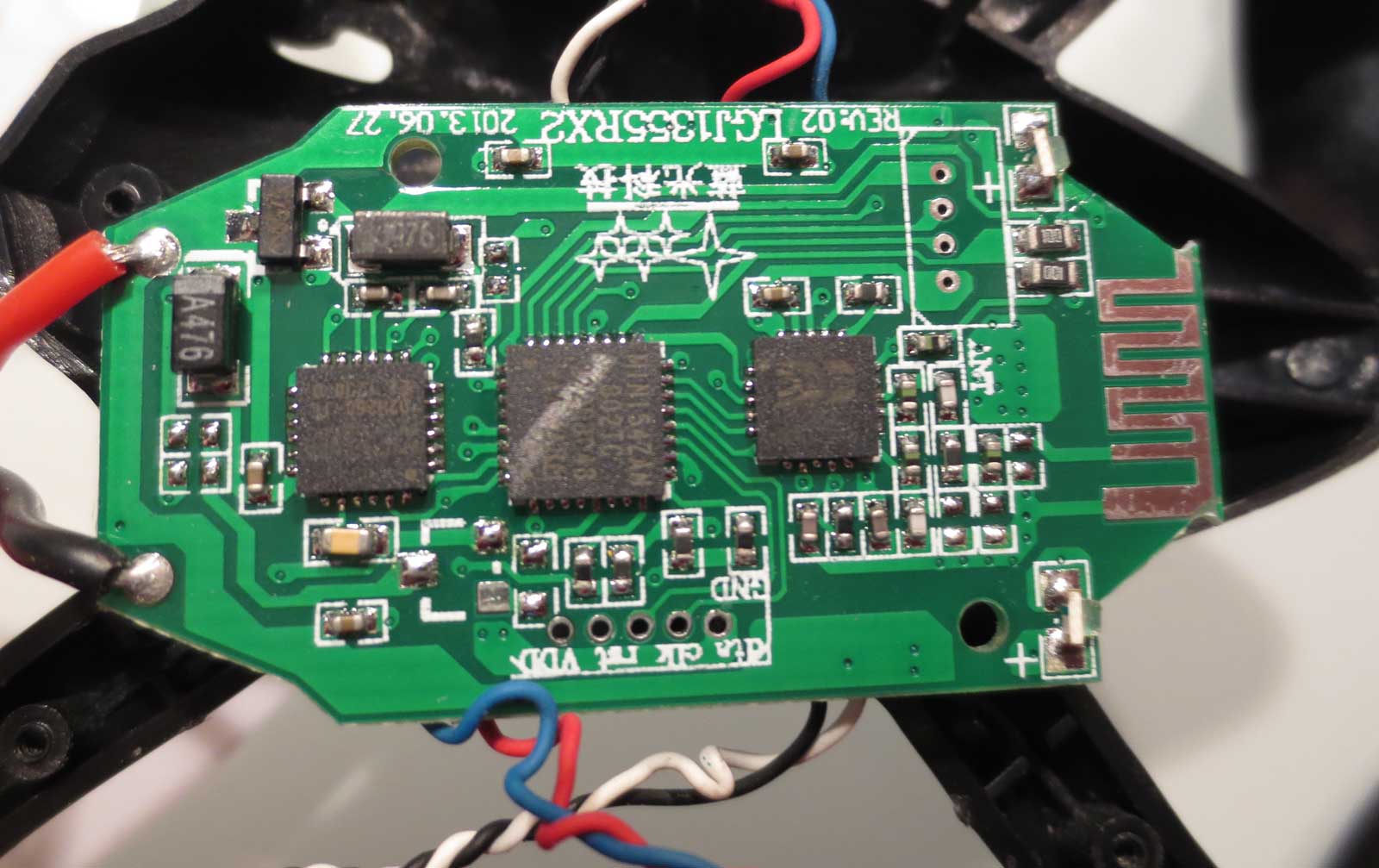
Ich habe heute einen "6 Axis Channel Remote Control RC Quadcopter" bekommen, den es momentan sehr billig auf ebay gibt: http://www.ebay.com.au/itm/Gyro-2-4GHz-4-6-Axis-Channel-Remote-Control-RC-Quadcopter-UFO-Helicopter-Blue-/350820057796 Da der Akku eine Weile laden musste, habe ich ihn natürlich erst einmal auseinandergenommen :) Ich hatte eigentlich ein paar vergossene ICS (China-Blob) und nicht nachvollziehbare Elektronik erwartet, bin aber überrascht worden. Bilder anbei. Bisher habe ich folgende Bauteile identifizieren können: * Invensense MPU6050 - 6 Achsen intertialsensor * Nuvoton Mini54ZAN - Cortex-M0 MCU mit 16kb flash und 2kb SRAM, SWD * Beken BK3423 - 2.4 Ghz tranceiver, anscheinend voll kompatibel zum nrf24L01 Netterweise ist sogar der SWD-Port herausgeführt. Damit müsste sich doch etwas anfangen lassen? Hat jemand dieses Controllerboard schon einmal gesehen? Gibt es dafür evtl. frei verfügbare Firmware, die man verändern könnte?
Angehängte Dateien:
-

ufo-complete.jpg
92 KB -

pcb-front.jpg
170 KB -

pcb-rear.jpg
140 KB
Der MPU6050 ist übrigens der gleiche Sensor, der auch in high-end Smartphones, wie z.B. Galaxy S4, verwendet wird...
Ich hab auch mal einen bestellt, so ein paar nrf24L01 Module hab ich auch noch rumliegen und SWD Debugger sowieso. Mal sehen wie er sich macht und zu Weihnachten wird er dann weiter verschenkt.
Is ja echt nen schickes schnuckeliges Teilchen. Das nenn ich mal spartanische Beschaltung :-) Wirklich nur das notwendigste drin. Aber irgendwie vermisse ich die Freilaufdioden bei den Motoren. Oder sind die da drauf gelötet ? Wie verhält sich das Teil denn im Flug ? Also programmieren lassen dürfte sich das Teil bestimmt (würd ich einfach mal so schätzen). Wär nen echt interessantes Spielzeug. Bin mal gespannt auf diesen Thread :-)
Moin, dieser kleine Quadrocopter ist im Original als Hubsan X4 bekannt. Im Original besitzt die Funke ein LCD. Dort kann man dann Reaktionszeiten usw. einstellen. Eine alternative Firmware gibt es dafür nicht. Gruß Kay
Kay, Du hast recht, es handelt sich um einen Hubsan X4 Nachbau. http://www.rcgroups.com/forums/showthread.php?t=1892499 Der X4 verwendet ein anderes PCB mit zwei 3-Achsen sensoren und einem anderen Tranceiver (A7105). Erstaunlich, dass der billigere Clone die modernere Hardware verwendet!? Beim Hubsan X4 ist der SWD-Anschluss auch nicht so bequem herausgeführt. Für den Hubsan X4 ist anscheinend das Protokoll der Fernbedienung reverse-Engineered worden: http://www.instructables.com/id/Easy-Android-controllable-PC-Interfaceable-Relati/ Zur Firmware habe ich nach intensiver Suche wirklich nichts finden können. In der RC-Community verwendet man gerne fertige Controller-Boards (Multiwii), es will sich wohl keiner mit den Controllern selbst auseinandersetzen :)
Rene, das Bauteil A476 könnte zusammmen mit den Substratdioden der n-channel Mosfets (G2301) die Freilaufdioden bilden. Ansonsten ist die Beschaltung wirklich minimal. Die Motoren werden direkt aus dem Akku gespeist, ohne dass es eine Rückkoppelung zum Ladestand zu geben scheint. Daher verändern sich die Flugeigenschaften mit der Zeit. Das Ding fliegt sich wirklich gut. Sogar deutlich besser als der zigmal teurere Opensource Crazyflie, der eine recht ähnliche Hardware verwendet (MPU6050 mit Cortex M3). Vas, Versand hat bei mir 4 Wochen gedauert.
Rechts scheint noch ein Serieller Port herausgeführt zu sein. Die Anschlüsse führen zu den RX und TX pins des MCUs.
Angehängte Dateien:
-

littleoktopussy.JPG
62 KB
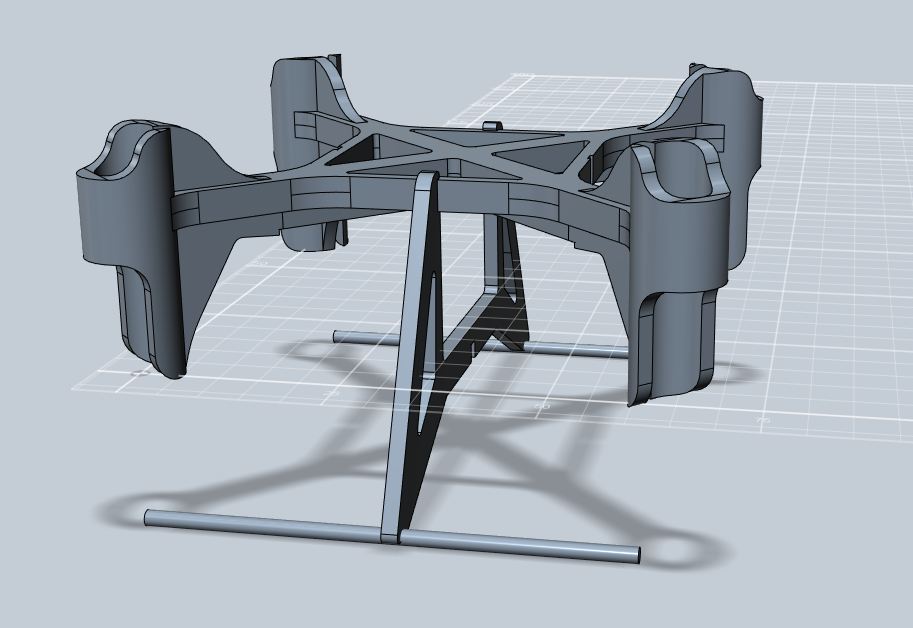
Tim . schrieb: > Der X4 verwendet ein anderes PCB mit zwei 3-Achsen sensoren und einem > anderen Tranceiver (A7105). Erstaunlich, dass der billigere Clone die > modernere Hardware verwendet!? Beim Hubsan X4 ist der SWD-Anschluss auch > nicht so bequem herausgeführt. Da der Clone nach dem Hubsan kam ist es ja verständlich das dort auch die aktuellere Hardware verwendet wird. Tim . schrieb: > Zur Firmware habe ich nach intensiver Suche wirklich nichts finden > können. In der RC-Community verwendet man gerne fertige > Controller-Boards (Multiwii), es will sich wohl keiner mit den > Controllern selbst auseinandersetzen :) Die meisten Hubsan oder Clone besitzer sind keine Programmierer. Deswegen werden vorhandene Multiwii Boards eingesetzt. Bei meinem aktuellen Projekt: LittleOktoPussy ( 8x Hubsan Motoren in Koax Bauweise ) setze ich auch die Multiwii Software ein, weil das schneller zum Erfolg führt und sich die Software bewährt hat. Der Rahmen wird gerade in einem 3D Drucker gedruckt. Gruß Kay
Hier für unter 20EUR auf Aliexpress http://www.aliexpress.com/item/Newest-6-Axis-Gyro-2-4GHz-4-Channel-Remote-Control-RC-Quadcopter-UFO-Helicopter-Kids-Toy/1045781270.html
Habe mir auch einen bestellt. Mal schauen was man damit anstellen kann (zumindest fliegen sollte das teil ja können :)) Tim hast du den schon mal an einen SWD ran gehangen? Kann man die Firmware auslesen (um die nach dem Basteln/Kaputt machen wieder drauf zu bekommen)? Eventuell kommt ja mit der original-Firmware auch schon was aus dem UART...
Also wenn du du dich einarbeitest könntest du locker die Paparazzi firmwar dafür verwenden. http://paparazzi.enac.fr/wiki/Main_Page Das projekt ist eh schon für locker 10 verschiedene verschiedene Boards ausgelegt, allerdings wird das nadelöhr wohl der support vom MCU. Fertig unterstützte Cortex m0 boards gibts bei dem Projekt noch ned.
Hab' mir auch mal einen (eigentlich 2) bestellt. Was denkt Ihr - ob das Teil eine einfache Kamera mitnehmen kann ? Würde damit zu gerne ein paar Luftaufnahmen z.B. unseres Hauses machen. Und winzige Kameras mit äusserst geringem Gewicht sind ja auch zu haben.
Martin Schröer schrieb: > Hab' mir auch mal einen (eigentlich 2) bestellt. > Was denkt Ihr - ob das Teil eine einfache Kamera mitnehmen kann ? > > Würde damit zu gerne ein paar Luftaufnahmen z.B. unseres Hauses machen. > Und winzige Kameras mit äusserst geringem Gewicht sind ja auch zu > haben. In der aktuellen c't Hacks steht, dass der Copter eine Keycam tragen kann, obwohl große Höhen damit nicht zu erreichen sind.
Ebenfalls mal bestellt, mal sehen wie lange das dauert. Woran hängt denn die erreichbare Höhe? Und wieviel macht die Kamera vom Gesamtgewicht aus?
qq schrieb: > Woran hängt denn die erreichbare Höhe? "Die Kette bricht stets am schwächsten Glied", sagt der Volksmund. Der Luftdruck (Wetterlage) bestimmt die absolut erreichbare Höhe. Die Akku-Kapazität und die Funk-Reichweite die relative Höhe vom Startpunkt. Das "schwächste Glied" dürfte die Funk-Reichweite sein. Tim. schrieb: > anscheinend voll kompatibel zum nrf24L01 Das wär' ja nicht übel, aber der nrf24L01 macht m.E nur 0dBm. "Bluetooth class 1" hingehen 20dBm. Die Reichweite wäre also nur etwa ein Zehntel von Bluetooth, im Freien also ca. 10m. Oder kommt die Fernbedienung weiter? @cpldcpu: Probiere das doch bitte mal aus. Bei meinem Helikopter-Projekt habe ich aus o.g. Grund erstmal "Bluetooth class 1" genommen. Nrf24L01 wäre aber auch nicht schlecht.
:
Bearbeitet durch User
Torsten C. schrieb: > Oder kommt die Fernbedienung weiter? @cpldcpu: Probiere das doch bitte > mal aus. Bei meinem Helikopter-Projekt habe ich aus o.g. Grund erstmal > "Bluetooth class 1" genommen. Nrf24L01 wäre aber auch nicht schlecht. Habe das Ding bisher nur im Zimmer ausprobiert. Da reicht die Entfernung. Allerdings haben sowohl Fernbedienung als auch Controllerboard nur eine recht einfache Antenne, ich glaube nicht dass man damit all zu weit kommt. Bin bisher noch nicht dazu gekommen, etwas an den SWD-Port anzuschließen, da ich im moment verreist bin.
Habe mir auch mal einen bestellt. Was ist denn da für ein Akku drin und wo bekommt man den? Bei einer Laufzeit von gerade mal 8 Minuten und 30 Minuten Ladezeit sollte man lieber ein paar mehr zur Hand haben.
Oliver Stellebaum schrieb: > Habe mir auch mal einen bestellt. > Was ist denn da für ein Akku drin und wo bekommt man den? > Bei einer Laufzeit von gerade mal 8 Minuten und 30 Minuten Ladezeit > sollte man lieber ein paar mehr zur Hand haben. Bei Ebay einfach "Hubsan Akku" eingeben.
Muss man den Copter irgendwie an die Fernbedienung anlernen? Ich habe nach dem Auspacken schnell mal geschaut ob der auch geht und es ging auch alles. Nachdem ich den akku dann voll geladen habe, blinken zwar die LED's am Modell, aber er reagiert nicht auf die Fernbedienung. Die aber blinkt und piept bei jedem Kommando und sonst habe ich auch nix verändert
Auf ebenen Untergrund legen, nach ein paar Sekunden blinkt er langsamer, dann den linken Steuerhebel einmal hoch und wieder runter.
Angehängte Dateien:
-

TX05.jpg
200 KB

hier ein Bild des Senders die Aussenantenne ist nur Verarsche, genauso wie die Angaben des Verkaeufers tonsee_mall (Artikel bezahlt am 22 Sep., versendet am 29 Sep., von wegen Versand am naechsten Tag und der Verk. erzaehlt 'Maerchen' auf nachfrage) vlG Charly
g Und dann gibts da bestimmt Leute, die in irgendwelchen Foren behaupten man müsse die Antenne so oder so drehen, damit die Reichweite besser ist :D Irgendwo müssen die halt sparen, damit die das ding für 20€ verticken können. Immerhin nicht nur ne PIFA (auch wenn die nicht unbedingt schlecht sind)
:
Bearbeitet durch User
Der "Original" Hubsan X4 hat in der Fernsteuerung nur eine PIFA... Da ist der Clone wohl sogar noch überlegen :)
kann bzw muss man das Ding irgendwie kalibrieren? Beim Hubsan wir ja in einigen Foren geschrieben, das man ja nicht die Trimmung verwenden soll, sondern das teil immer mal wieder neu kalibrieren muss. meiner kam vor 2 Tagen an, jedoch hatte einer der Motoren einen Defekt und funktioniert nicht richtig. Bin mal gespannt wie es mit dem Umtausch aussieht, bzw einem Ersatz.
:
Bearbeitet durch User
hab eben gesehen, da sind ueber 1000st verkauft, verutlich kommen die deswegen immer spaeter weil die kein nachschub beibekommen ich hab mir noch einen hier bestellt: 190881964364 ist nur 3 Cent teurer, wird aber vermutlich scheller geliefert vlG Charly http://www.ebay.de/itm/6-Axis-Gyro-2-4GHz-4-Channel-Remote-Control-RC-Quadcopter-UFO-Helicopter-Blue-/190881964364?pt=AU_Toys_Hobbies_Radio_Controlled_Vehicles&hash=item2c7173a14c
:
Bearbeitet durch User
Martin J. schrieb: > jedoch hatte einer der Motoren einen Defekt Das ist ja schade, aber mein "Beileid" hilft Dir leider auch nicht. Viel Erfolg bei der Reklamation. Für meinen hatte ich vorgestern 'ne Benachrichtigung im Briefkasten (Nachnahme per ebay). Heute abgeholt und mit meinem Sohn (10 Jahre) zusammen ausprobiert. Wir hatten Glück und sind beide begeistert. Der Z-Gyro (Gierwinkel) ist ja super präzise. Von dem MPU6050 hatte ich trotzdem mehr erwartet. Beim Steuern verliert er an Höhe, da kann man sicher noch einiges an der Firmware "schrauben". Die Accel_Z scheinen die gar nicht auszulesen. Ich überlege immer noch, ob ich mir so ein Projekt ins Haus hole und noch einen zweiten bestelle. Hat schon einer von Euch konkrete Ambitionen in dieser Richtung? Ach ja: Ersatzakku muss sein, die Flugzeit ist ja wirklich kurz.
:
Bearbeitet durch User
Torsten C. schrieb: > Ersatzakku muss sein Ich habe diese bestellt: 380mAh, 2,31€/Stück http://www.aliexpress.com/item//1135685083.html Ich hoffe, dass die Gewichtsverteilung bei den größeren Akkus paßt, das Akkufach scheint ja groß genug zu sein, der mitgelieferte Akku füllt das Akkufach ja nicht ganz aus.
Habe meinen jetzt auch ausgiebig getestet uns muss sagen: Die Hadware ist echt super aber die Firmware hat einige Bugs: Nach harten Beschleunigungen scheint der 'QC dekalibriert, will imme völlig zufällig abhauen. Nachdem man einmal gegengesteuert hat fängt er sich wieder und alles wird wieder normal. Außerdem Scheint der Roll und Nickwinkel den Schub nicht zu beinflußen. Deshalb sinkt er natürlich beim Manöver fliegen... Das kann die Multiwii firmware besser... Die gibts aber leider nur für Atmegas....
Vielen Dank Hubsi! Lag zusätzlich noch daran, das wohl noch die Trimmung der fernbedienung komplett verstellt war
Lieferung von tonsee_mall kam heute bei mir an, bestellt am 22. Versand laut Tracking am 23. Dummerweise ist ein Arm angebrochen und der Motor drin kaputt. Ich hab den Verkaeufer angeschrieben, mal sehen was passiert. Sonst gibt es hier: http://www.tmart.com/search.html?q=385 Ersatzteile, hab mal was bestellt und bin gespannt wann es ankommt. Sind die Motoren Verbrauchsmaterial oder hab ich meine schlecht behandelt?
Bei mir ist nach etlichen Crashs auch ein Motor kaputt gegangen. Scheint verbrauchsmaterial zu sein.
Hätte ich das mal früher gewusst, so hielt der Spaß nur 15 Minuten und jetzt wieder drei Wochen Versandspaß :)
Tim . schrieb: > Bei mir ist nach etlichen Crashs auch ein Motor kaputt gegangen. Oh, da habe ich Sohnemann nochmal geimpft: Keine Crashs mehr! 30g Nutzlast kann er (wegen des Bodeneffekts) gerade so anheben, aber mit 28..29g gewinnt er sogar Höhe, mit vollem Akku.
Angehängte Dateien:
-

Dsc_6181_LumiaModul.jpg
120 KB
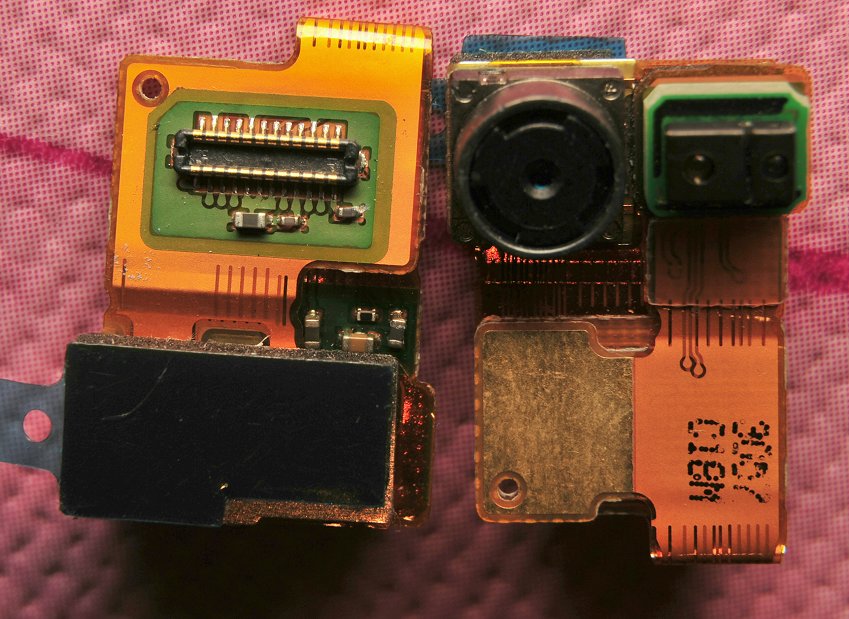
Torsten C. schrieb: > Hat schon einer von Euch konkrete Ambitionen in dieser Richtung? PS: Wenn wir es schaffen, 'ne neue Firmware zu machen, würde ich gern 'ne Kamera einbauen. Ich habe bei Aliexpress für 5€/Stück drei Nokia-Lumia-Kameras auf "gut Glück" gekauft. Ich habe noch keine Ahnung, wie die Pinbelegung ist. Hoffentlich wenigstens DCMI. Die wäre optimal, um sie unter den den Quadkopter zu kleben. Der 24-Pin-Steckverbinder im Bild hat 0,4mm-Pitch. Ich werde dazu mal einen Extra-Thread starten, wenn ich erste Erkenntnisse habe.
Ich habe zeitgleich auch eine Cam bestellt, erstmal was ganz billiges (Ebay: 141019163321) Wenn man das Ding entbeint könnte man vielleicht was erreichen. Neue Firmware programmieren ist interessant, aber wie? Erstmal die PINs finden und was für ein Interface braucht man dafür?
Oliver Stellebaum schrieb: > Ich habe zeitgleich auch eine Cam bestellt, erstmal was ganz billiges > (Ebay: 141019163321) Die Dinger hat Conrad mal für richtig viel Geld vertickt.. Am Quadcopter hat diese Kamera bei mir kein gutes Ergebnis geliefert, das Bild "wobbelt" stark. Am Readyset Spielzeugfluggerät hatte ich mal so eine: http://www.ebay.de/itm/camera-Kamera-Parts-Ersatzteile-fur-WLToys-V959-16-RC-Quadcopter-UFO-/181224819804?pt=RC_Modellbau&hash=item2a31d74c5c. Die Videos waren ziemlich gut. Leider etwas teuer. Und man müsste probieren wie man die ansteuern muss. War bei meinem Quaddi mit einem dreipoligen Kabel direkt mit der FC verbunden.
Oliver Stellebaum schrieb: > was für ein Interface braucht man dafür? Ich habe (noch) keine Ahnung. Wenn ich weiss, wonach ich suchen muss, würde ich mich mal wie beim Oszi-Componententester mit niedrigen Strömen langsam an die 24 Pins heran tasten. Siehe Beitrag "Handy-Kamera: Welche Schnittstelle?" Ich gebe mir mal 'ne 20%-Chance. Aber ein Versuch ist es m.E. Wert.
Ist es möglich an den motor anschlüssen brushless motortreiber und motoren zu hängen ? Oder fliegt der dann nicht mehr gut ? Da liegen ja spannugen von 0-3,7 V an
Torsten C. schrieb: > Ich gebe mir mal 'ne 20%-Chance. Dieses Forum ist echt gut (also einige spezielle Mitglieder). Inzwischen bin ich bei 80%. Turbonator schrieb: > brushless motortreiber Klar, aber BLDC sind viel schwerer. Dann musst Du auch neue Propeller berechnen. Und die sind dann viel größer. Dann brauchst Du ein anderes "Gehäuse" usw. Außerdem wäre es sinnvoller die Spannung vor dem DAU digital "abzugreifen", als die 0..3,7V auszuwerten. Was hast Du vor? PS: Wobei: Gibt es Quadkopter mit sich überlappenden Propellern? Also einfach in zwei oder vier Ebenen?
:
Bearbeitet durch User
Ich hatte vor das ganze zu vergrößern motor , Rahmen, usw. Dann noch einen 7,4 oder 11,1 volt akku benutzen , extra platine die versorgt die orginal platine mit 3,7 Betriebsspannung worauf dann auch der regler sitzt . Spinnereien halt :)
Das es dann nicht mehr gut fliegt habe ich gefragt weil ich mir gedacht hab das der quadrocopter vieleich umkippt im flug wegen dem anderem leistungs Verhältnis ( motorleistung, gewicht ) oder trägheit (ms)der treiber ... ich hab keine ahnung deshalb die frage an jemand mit ahnung . Sehr interessant morgen bestell ich mir auch eins
Angehängte Dateien:
-

Ueberlapp-Quadkopter.png
15 KB
Turbonator schrieb: > Ich hatte vor das ganze zu vergrößern Die Idee ist nicht übel, aber ich denke, man tut sich keinen Gefallen damit. Alle Regel-Parameter sind auf die Hubsan-Physik ausgelegt. Um neue Firmware wirst Du nicht herum kommen. Torsten C. schrieb: > mit sich überlappenden Propellern? Ich meine so, wie im Bild. rot: obere Ebene, rehts drehend blau: untere Ebene, links drehend grün: Platine Zur Platine: Nix in der Mitte, dafür sind Elektronik, Akkus und Kameras im "Windschatten" unter den Motoren. Also nicht so wie hier in der Mitte: http://1.bp.blogspot.com/-rWZ62wg3CaY/TqgxZbDMUvI/AAAAAAAAAAY/RhV3H7Ri2vA/s1600/parts.JPG Alternativ: Der Quadkopter fliegt auf dem Kopf, damit der GPS-Empfänger freie Sicht hat. Wegen des Off-Topic-Risikos: Wohin weichen wir aus? Brauchen wir einen neuen Thread? PS: Oder noch besser: Die roten Propeller oben (Kameras unter den Motoren) und die blauen unten (GPS-Empfänger über den Motoren). PPS: Das Kreuz in der Mitte ist kein FR4 sondern das sind Kupferdrähte aus Hausnsinstallationskabeln, um die LiPos über und unter den Motoren ohne großen Spannungsabfall in Reihe zu schalten. Dazu SDA und SCL, um Informationen zwischen den vier Platinen auszutauschen.
:
Bearbeitet durch User
Deine idee hab ich so verstanden das die gegenüberliegenden entweder oben oder unten liegen . Hat bestimmt einen komischen schwerpunkt und bei einem Absturz sieht es für die motoren/popeller die richtung unten angebracht schlecht aus , wahrscheinlich falsch verstanden .
Turbonator schrieb: > wahrscheinlich falsch verstanden Nö. Ich bin halt so: Nix ist selbstverständlich. Turbonator schrieb: > Hat bestimmt einen komischen schwerpunkt Der liegt in der Mitte - so oder so. Turbonator schrieb: > bei einem Absturz sieht es für die motoren/popeller die richtung unten > angebracht schlecht aus Meine Beobachtung ist: Für die oberen Propeller (andere kenne ich bisher nicht) sieht es auch nicht gut aus. Oft landet das Teil auf dem Kopf.
Ok hast recht ist wie mit dem Marmeladenbrot oben sind die motoren deswegen fällt der auf die popeller . Ich meinte mich selber mit der Aussage : warscheinlich falsch verstanden . 80% mit kamera was heißt das ? ich muss erst ab 22 € mit dem zoll aufpassen oder ?sry wegen dem offtopic
Turbonator schrieb: > 80% mit kamera was heißt das ? Das Zitat sagt alles: Dominic A. schrieb im Beitrag "Re: Handy-Kamera: Welche Schnittstelle?": > Ich dachte immer das es zur MIPI Schnittstelle sogut wie gar keine > öffentliche Dokumentationen gibt... Bis zu Frank seinem Post. Nun bin ich optimistischer.
:
Bearbeitet durch User
@Turbo: Korrekt, 22€ sind die Freigrenze ohne Einfuhrsteuer, mehr als 22€ bis 150€ kostet 19% Einfuhrsteuer und ab 150€ kommen tatsächlich Zölle drauf. Zu beachten ist, dass es dabei immer um die Summe inklusive Versand geht. Die 80% mit Kamera, damit meinte Thorsten wohl, dass er sich selbst eine 80%ige Chance gibt, die vom ihm gekaufte Lumia-Kamera an's Laufen zu bringen. Das würde mich übrigens auch sehr interessieren. @Thorsten C: Ein Offtopic-Risiko sehe ich hier (noch) nicht. Was Ihr Euch überlegen solltet, ist, dass Ihr bei diesen massiven Änderungen, also neue Motoren, neuer Akku, damit auch neue Rotoren, wahrscheinlich neuer Rahmen, aber in jedem Fall wohl neue Firmware am Ende nur noch die Fernbedienung im Originalzustand behalten werdet. [Und wegen neuer Firmware - s.o. - wird die wohl auch noch überarbeitet werden müssen.] Da macht es doch schon eher Sinn, gleich einen Quad komplett neu zu entwerfen, oder ? [Und in diesem Falle wäre so ein Thema dann auch zu viel für diesen Thread.] ----- Ihr - und wenn das Paket endlich ankommt, auch wir - besitzen doch alle den Hubsan-Klon, bzw. beabsichtigen, uns einen zuzulegen. Vielleicht sollten wir uns zunächst auf kleinere Modifikationen und Tests an dem Hubsan verständigen, um so Ideen und Erfahrungen zu sammeln; diese könnte man dann schlussendlich in einem eigenen Projekt zwecks Neubau eines Quads umsetzen. Ich habe hier gestern Abend erst recht erfolgreich eine einfache Funkschaltung mit RFM12 Modulen aufgebaut - und war recht angetan, wie weit und zuverlässig diese Module funktionieren. [Ich hatte den Sendeteil im Haus am Labornetzteil und bin wie ein Irrer mit dem Empfangsteil (vom 9V Block gespeist) durch unsere Siedlung gelaufen - um halb drei nachts :) Ich kann nur hoffen, dass mich keiner unserer Nachbarn mit dem wild grün und blau blinkenden Ding gesehen - oder wenigstens nicht erkannt hat :P ]
Martin Schröer schrieb: > Da macht es doch schon eher Sinn, gleich einen Quad komplett neu zu > entwerfen Zustimmung, so meinte ich das ^^. Martin Schröer schrieb: > Ich habe hier gestern Abend erst recht erfolgreich eine einfache > Funkschaltung mit RFM12 Modulen aufgebaut - und war recht angetan, wie > weit und zuverlässig diese Module funktionieren. Das klingt gut, aber verstanden habe ich es noch nicht: Meinst Du die mitgelieferte Ferbnbedienung oder andere Module? Torsten C. schrieb: > Das wär' ja nicht übel, aber der nrf24L01 macht m.E nur 0dBm. Wieviel dBm hatten diese Module ggfs.?
Timmo H. schrieb: > 0dBm die nRF und die Beken machen eigentlich 5dBm OK, wie erwartet. Ich will ja nicht penetrant sein aber: Wie weit und zuverlässig funktionieren diese Module nachts um halb drei, also wieviele Meter?
Angehängte Dateien:
-

nRF.jpg
210 KB
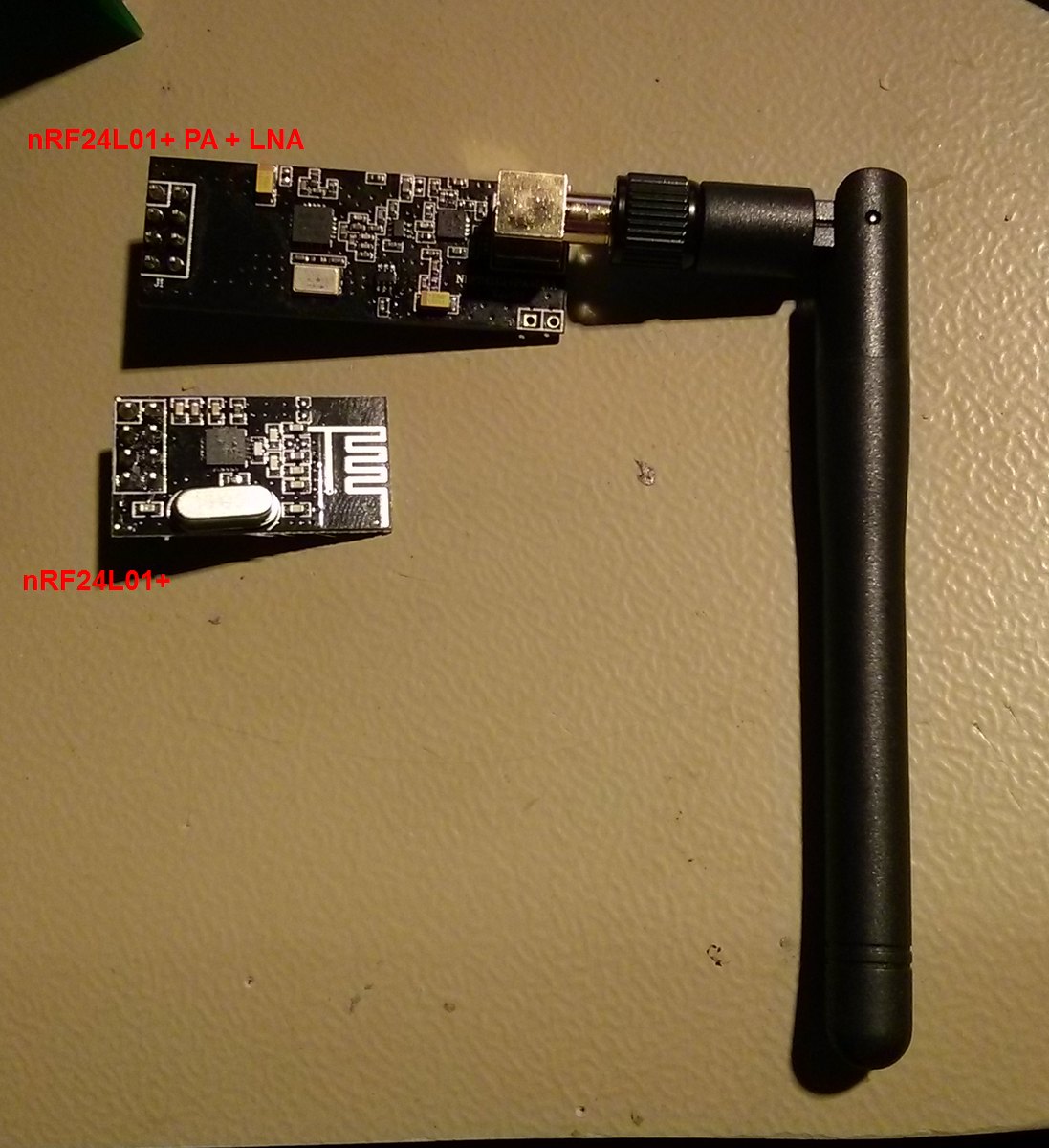
Mit den 0dBm kommst du etwa 30-40m Freifeld und PIFA, mit den 5dBm etwa 80-100m. Eigentlich sind die recht genial die dinger. Für 1€ bekommt man die nRF module. Und inzwischen für 4€ die nRF24L01+ mit LNA und PA (damit kommt man dann mit der mitgelieferten Dipolantenne auf ~1000m bei 20dBm)
:
Bearbeitet durch User
Timmo H. schrieb: > inzwischen für 4€ die nRF24L01+ mit LNA und PA Cooool. :-) Kannst Du den Link bitte mal im Beitrag "China SUPER Bauteile-Schnäppchen Thread" posten? Ich bin nicht unter 4,40€ gekommen: http://www.aliexpress.com/item//1372071825.html
Naja hab etwas untertrieben sind 4,42€ http://www.aliexpress.com/item/NRF24L01-PA-LNA-Wireless-Module-with-Antenna-1000-Meters-Long-Distance-FZ0410-Free-Shipping-Dropshipping/782032049.html Vor etwas über ein Jahr müsste ich noch $15/ Stück blechen.
:
Bearbeitet durch User
Timmo H. schrieb: > Vor etwas über ein Jahr müsste ich noch $15/ Stück blechen. Ich schlockere auch nur noch mit den Ohren. Ein Wahnsinn! Ich habe eben das 5er-Set bestellt.
Der Quadcopter scheint generell unter dem Namen "JXD 385" bekannt zu sein. http://www.rcgroups.com/forums/showthread.php?t=1987864 Dort hat auch jemand das Ding mit einer Kamera ausgerüstet. "Y3000": http://www.aliexpress.com/item/Free-shipping-THE-World-s-Smallest-1280-720P-mini-Video-Recorder-High-Definition-Camera-support-32/825597460.html Hersteller ist Jin Xing Da. Die Website scheint nicht auf dem neusten Stand zu sein: http://www.jxdtoys.com/en/aboutus.asp
Angehängte Dateien:
-

ports.jpg
200 KB
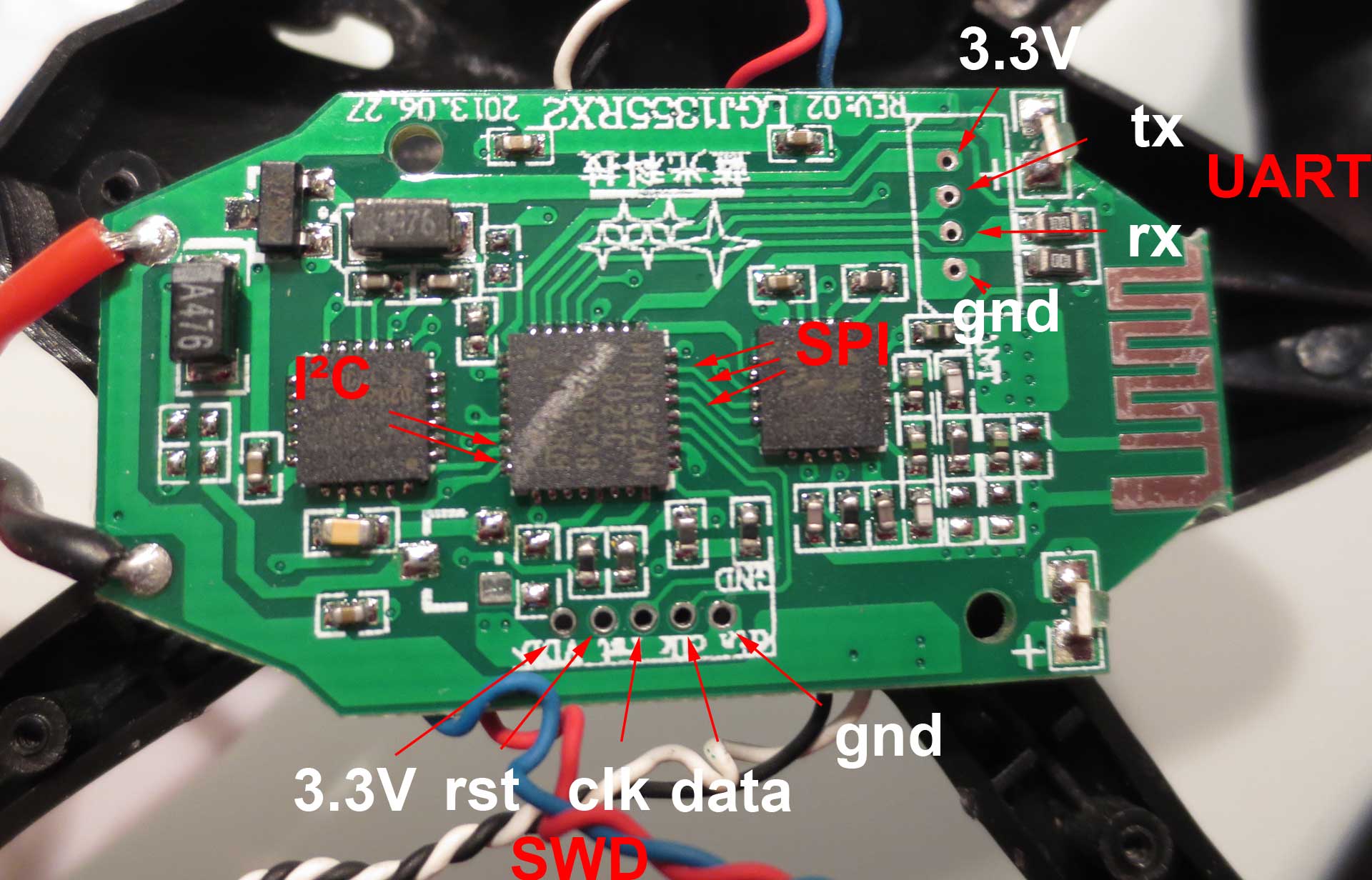
So, die Frage ist nun, ob und wie man neue Firmware auf den Controller bekommt? Hier ein paar Links zum MINI54ZAN: http://www.keil.com/dd/chip/6142.htm http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=5dbf7d7a-b6df-4fe1-91c9-063449500ce7 http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=ca35dc89-c740-421a-b13b-5a8d050315e3 Die Beschaltung des Controllers ist recht einfach (siehe Bild): Der MPU6050 hängt am I2C Port, der BK2423 am SPI. UART und SWD sind herausgeführt. Die Datenblätter die wichtigsten Bauteile habe ich angehängt. Korrektur zum Bild: Die Spannungsregler sind für 3V, nicht für 3.3V ausgelegt. Macht bei einem 3.7V Akku auch mehr Sinn.
:
Bearbeitet durch User
Aus der Featureliste
1 | Core |
2 | ARM® Cortex™-M0 core running up to 24 MHz |
3 | One 24-bit system timer |
4 | Supports low power Idle mode |
5 | A single-cycle 32-bit hardware multiplier |
6 | NVIC for 32 interrupt inputs, each with 4-level priority |
7 | Supports Serial Wire Debug (SWD) with 2 watchpoints/4 breakpoints |
8 | Built-in LDO for Wide Operating Voltage Range: 2.5V to 5.5V |
9 | |
10 | Memory |
11 | 4KB/8KB/16KB flash memory for program memory (APROM) |
12 | Configurable flash memory for data memory (Data Flash) |
13 | 2KB flash memory for loader (LDROM) |
14 | 2KB SRAM for internal scratch-pad RAM (SRAM) |
15 | In-System Programming (ISP) and In-Circuit Programming (ICP) |
SWD wird supported. Nur wie lässt sich diese Port nutzen, um die Firmware auszulesen? Die Neuprogrammierung per ISP scheint sich etwas komplexer zu gestalten. Die Controller hat einen dedizierten Flash-Bereich für den Bootloader (LDROM). Allerdings scheint es keinen fest vorgegebenen Bootloader zu geben, sondern der Benutzer kann diesen festlegen. Der Herausgeführte serielle Port deutet darauf hin, dass ein Bootloader installiert sein könnte. Nuvoton hat netterweise die Referenzimplementierung der ISP-Tools ins Netz gestellt: http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=4b47b09d-b116-4ccd-aa85-31e261a87d30
:
Bearbeitet durch User
Das ISP-Tool sieht ziemlich nützlich aus. Leider lässt sich damit die Firmware nicht auslesen:
1 | There is no way to use this ISP Programming Tool to dump the MCU‟s APROM no matter the MCU chip is locked or |
2 | un-locked. So, the data security of APROM is ensured. For DataFlash, however, it is not easy to be protected |
3 | because it can be dumped by executing a program residing in APROM, which may be the user‟s program or a |
4 | malicious program. (Note accessing DataFlash is a normal function when MCU runs in APROM.) The hacker can |
5 | use this programming tool to program his malicious program in APROM, and then let MCU start to run to dump the |
6 | DataFlash. |
Also lässt sich nur eine neue Firmware schreiben und flashen oder wie ist das ISP-Tool gemeint?
Es muss ein Tool geben, um das AProm zu lesen/verifizieren. Wie sollte man sonst zuverlässig programmieren? Und ohne die originale Firmware lesen zu können, macht es wenig Spaß. Schließlich möchte man notfalls den Rückweg antreten können, wenn die eigene Soft nicht fertig wird.
Es gibt noch andere Programmiermodi: ICP, Gang http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=4b47b09d-b116-4ccd-aa85-31e261a87d30 Außerdem gibt es noch SWD. Kennt sich hier jemand mit SWD aus? Ist das Protokoll standardisiert? Kann man damit den Speicher lesen?
Aha, mit ICP scheint es zu gehen. Nur dafür benötigt man anscheinend ein USB-Dingle von Nuvoton. Leider finde ich auch gerade die Dokumentation des Protokolls nicht. Im Handbuch gibt es nur Hinweise darauf, dass das Protokoll den SWD-Port nutzt.
1 | 1.1.2 Features |
2 | 1.1.1 In-Circuit programming target chip |
3 | 1.1.2 Backup flash data of target chip (If the target chip is not flash protected) |
4 | 1.1.3 Backup offline flash data |
5 | 1.1.4 Offline programming mode |
6 | 1.1.5 Write software serials number (SN) to target chip |
7 | 1.1.6 Limit the maximum programming count |
Das macht Hoffnung: https://www.youtube.com/watch?v=hL1Q7yYJfOs @Thorsten C: Die RFM12 hatten zunächst nichts mit dem Quad zu tun, da ich immer noch auf die Lieferung warte. Ich hatte diese Funkstrecke nur aus Neugier / Langeweile aufgebaut.
hier gibt es auch das camera Modul extra :) http://www.ebay.de/itm/AMAX-Akku-Battery-Propeller-Motor-LED-Ladegerat-FPV-Kamera-UFO-Drohne-Hubsan-X4-/331000374134?pt=RC_Modellbau&var=540228311869&hash=item4d1128e376
Hast Du zu dem "original" Kameramodul weitere Infos ? Ich konnte weder Daten zur Auflösung, Features oder Gewicht finden, noch listet youtube Beispielvideos. Bis dahin würde ich also eher zur 808 tendieren, die ist zumindest halbwegs "dokumentiert".
:
Bearbeitet durch User
Tim . schrieb: > Hier ein paar Links zum MINI54ZAN … Datenblätter für die > wichtigsten Bauteile habe ich angehängt. Wow, gute Arbeit, danke. Marco schrieb: > camera Modul extra Hier sind noch ein paar mehr Bilder von dem "HX4C": http://www.banggood.com/Hubsan-X4-H107C-RC-Quadcopter-Spare-Parts-Camera-Module-30W-H107-a28-p-86938.html Martin Schröer schrieb: > Das macht Hoffnung Sieht nett aus, aber etwas verzerrt. Wie meinst Du das mit der Hoffnung? Was würdet Ihr denn nehmen, eine "Y3000", das "HX4C" oder die "808"? http://nerdfever.com/?p=1215 Ich denke mal "laut": Preislich nehmen die sich alle nicht viel. Das "HX4C" paßt wohl kaum noch in das Quadkopter-Gehäuse. Die Y3000 hat 'ne gute Auflösung und ein Gehäuse, vieleicht kann man den Akku ausbauen, um Gewicht zu sparen. Wenn die Kamera am Antriebs-Akku hängt, wird dieser zwar stärker belastet, aber da die Propeller weniger Last tragen müssen, dürfte die Flugzeit trotzdem länger sein. @der_nachbauer: Du tendierst zur 808? Die kann man zwar sicher auch am Antriebsakku betreiben, aber die Bildqualität der Y3000 macht auf mich einen besseren Eindruck, weniger Verzerrung. PS: Hat jemand Bilder gefunden, die mit der HX4C gemacht wurden? Oder ist das eine Y3000 ohne Gehäuse? Georg G. schrieb: > Schließlich möchte man notfalls den Rückweg antreten können, wenn die > eigene Soft nicht fertig wird. Wegen der 10€ würde ich mir nicht so viele Gedanken machen: http://www.tmart.com/JXD-385-004-PCB-Board-Receiver-for-RC-Helicopter-Green_p192103.html PS: Hat sich schon mal jemand durch das "CooCox Tech Support Forum" und das "Nuvoton Tech Support Forum" gewühlt? http://www.coocox.org/nuvoton.htm
:
Bearbeitet durch User
So, hab meinen gestern auch bekommen, ist gar nicht so einfach das Ding zu fliegen, jedenfalls nicht in einem beengten Zimmer: https://www.youtube.com/watch?v=Q2mY_YL8R2U
Dein Zimmer ist doch vergleichweise groß, ich habe wesentlich weniger Platz im im Zimmer hier. Du musst beim Gasgeben die Massenträgheit mehr beachten: Alle Reaktionen mit dem Gas dauern etwas und du übersteuerst im Kopf etwas, deshalb fliegt der Kopter immer rauf und runter... immer etwas sensibler und dafür immer etwas abwarten. Nach meiner Erfahrung lässt sich der Copter in der ersten Geschwindigkeitsstufe garnicht fliegen, da selbst bei Vollauschlag zuwenig passiert....
Thorsten, zur 808 tendiere ich nur deswegen, weil es einige Videos - wie z.B. das oben angegebene - von dieser Kamera am Hubsan gibt. Und das begründet auch die Hoffnung, belegt es doch, dass diese Kombination funktioniert, d.h. der Copter fliegt damit noch anständig [hoch]. [Und Stromversorgung aus dem Copter ist da noch nicht einmal gegeben, laut Kommentaren hatte der Macher des Videos beides (Copter && Cam) mit separaten Akkus versorgt. Da wäre also sogar noch Spielraum.] Die Y3000 müsste ich mir mal als Alternative ansehen. [Btw - habt Ihr schon günstige und schnelle (innereuropäsich ?) Bezugsquellen für die Cams gefunden ?] Deine Einschätzung zu der HX4C finde ich herzallerliebst, wird diese Kamera doch von dem entsprechenden shop als "original" Zubehör zum Hubsan vertrieben :)
:
Bearbeitet durch User
Habe grade mal die fb geöffnet: Unten ist ein SPI? Pinheader und ein Auschnitt für ein zusätzliches Display und 4 Buttons, alles unter dem Sticker auf der Vorderseite. Alles gut beschriftet, deshalb könnte ja mal einer mit logic analyzer reinschauen... DEr µC ist von Nuvoton, mit der Bezeichnung kann google aber nix anfangen.
Nils A. schrieb: > Habe grade mal die fb geöffnet: > Unten ist ein SPI? Pinheader und ein Auschnitt für ein zusätzliches > Display und 4 Buttons, alles unter dem Sticker auf der Vorderseite. > Alles gut beschriftet, deshalb könnte ja mal einer mit logic analyzer > reinschauen... DEr µC ist von Nuvoton, mit der Bezeichnung kann google > aber nix anfangen. Schauen nach was? Welche Signale interessieren? Mein Quadcopter ist kaputt und hier liegt ein 10-Euro-Logikanalyzer.
Naja zum vermeindlichen Display geht ein 3 Wire Spi Bus, da könnte man ja mal lauschen, ob der µC versucht das Display anzusteuern... Die Daten und Takt Leitung an diesem Anschluss geht auch zum Funkmodul, dieses hängt also am selben SPi bus. Wenn man diese Daten jetzt Mitloggt und dann reverse Engineert könnte man also recht leicht herausfinden, welche Daten an den Copter geschickt werden und seine eigene Fernsteuerung villeicht auch mit einem AVR oder einen Pc gesteuerten Quadro bauen.
Meiner ist gestern angekommen. Man ist das kompliziert zu fliegen, da muss man echt üben. Schon aus wenigen cm. Höhe knallt er ganz schön auf den Boden. Macht es Sinn unter jeden Fuß ein wenig Sugru zu kneten damit er etwas gefederter aufsetzen kann oder beinträchtigt dies das Gewicht?
> Naja zum vermeindlichen Display geht ein 3 Wire Spi Bus, da könnte man > ja mal lauschen, ob der µC versucht das Display anzusteuern Das Original von Hubsan hat ein Display. Da davon auszugehen ist, dass im Clone die gleiche Software Verwendung findet, sollte auch ein Display unterstützt werden. > Schon aus wenigen cm. Höhe knallt er ganz schön auf den Boden. Macht es > Sinn unter jeden Fuß ein wenig Sugru zu kneten damit er etwas gefederter > aufsetzen kann oder beinträchtigt dies das Gewicht? Ja. Styroporfüßchen.
Oliver Stellebaum schrieb: > Schon aus wenigen cm. Höhe knallt er ganz schön auf den Boden Es gibt - leider noch nicht separat gefunden - in einem Reparaturset einen rundum Rammschutz. Der schont Wände, Möbel und vor allem die Propeller.
Davis schrieb: > Ja. Styroporfüßchen. Habe ich auch gemacht. Schlimmer ist aber ein Kopüber-Aufprall auf die Propeller. Da hatte ich noch leine gute Idee. Ein Propeller hatte sich so weit auf die Achse geschoben, dass der Propeller blockiert hat. Hochziehen hing nur mit zwei Kartoffelschälmessern, die ich als "Schere" angeornet zusammengedrückt habe.
Torsten C. schrieb: > Davis schrieb: >> Ja. Styroporfüßchen. > > Habe ich auch gemacht. Schlimmer ist aber ein Kopüber-Aufprall auf die > Propeller. Da hatte ich noch leine gute Idee. Ein Propeller hatte sich > so weit auf die Achse geschoben, dass der Propeller blockiert hat. Und genau dabei kann es auch die Achse durch den Motor nach unten drücken, dann brauchst du einen neuen Motor.
Torsten C. schrieb: > Achse --> Welle! Torsten C. schrieb: > Hochziehen hing nur mit zwei Kartoffelschälmessern, die ich als "Schere" > angeornet zusammengedrückt habe. Mechanik und handwerkliche Dinge sind nicht deine Freunde. Lass lieber die Finger davon, bevor du dich ernsthaft verletzt.
mudda schrieb: > Mechanik und handwerkliche Dinge sind nicht deine Freunde. Lass lieber > die Finger davon, bevor du dich ernsthaft verletzt. Lass' du mal das mitschreiben hier, das schadet deinen Angststörungen.
Ach Mutti (mudda), was täten wir in unserem Forum nur ohne besserwisserische Gäste, wie Dich. ;-) Ich hatte gehofft, dass vielleicht noch jemand 'ne bessere Idee hat, als Kartoffelschälmesser. Meine Scheren hatten alle einen zu großen Keilwinkel. PS: Für Muttis sind "Angststörungen" ganz typisch, das kenn ich von meiner. ;-)
:
Bearbeitet durch User
Moritz A. schrieb: > Lass' du mal das mitschreiben hier, das schadet deinen Angststörungen. Du konntest es einfach nicht lassen zu antworten, oder?
Torsten, schau mal ob der Prop oben durchgebohrt ist. Dann kannst du die Welle auch mit einer zweiten, etwas dünneren, nach unten ausdrücken. Alternativ mit irgendeinem anderen Gegenstand, Rouladennadel, Eierpiekser, etc..
mudda schrieb: > schau mal ob der Prop oben durchgebohrt ist. Das Brainstorming-Prinzip: Das bringt mich auf den Gedanken, die (normalerweise nicht durchgebohrten) Propeller zu durchbohren, so dass man oben einen Gumminöpsel hineinstecken kann. Das dämpft den Aufprall und ermöglicht ein Entfernen der Propeller, ohne die Motorlager zu belasten. Mein Sohn meinte, man könnte Silikon-Dichtmasse dafür nehmen. Vielleicht hat noch jemand 'ne bessere Idee. Bitte Feedback, falls das hier zu off-topic wird. Turbonator schrieb: > Hat sich schon etwas mir der firmware ergeben ? Was soll sich denn da ergeben? Will die im Ernst jemand disassemblieren? Eine neue (eigene) Firmware kann doch nicht so kompliziert sein, bei den vielen Mikro- und wasweisichwas-Kopter Open-Source-Projekten.
:
Bearbeitet durch User
http://www.aliexpress.com/item/Free-Shipping-Hubsan-H107-H107L-X4-V252-RC-Quadcopter-Parts-Protection-Cover/1337556710.html G. schrieb: > Oliver Stellebaum schrieb: >> Schon aus wenigen cm. Höhe knallt er ganz schön auf den Boden > > Es gibt - leider noch nicht separat gefunden - in einem Reparaturset > einen rundum Rammschutz. Der schont Wände, Möbel und vor allem die > Propeller. ......
Turbonator schrieb: > Hat sich schon etwas mir der firmware ergeben ? Ich habe im Multiwii-Forum einen Thread aufgemacht: http://www.multiwii.com/forum/viewtopic.php?f=22&t=4155 Die Antworten sind noch etwas mager, aber anscheinend hält man es nicht für aussichtlos, MultiWii auf den MINI54ZAN zu portieren. Bleiben also noch ein paar Schritte: - Protokoll der Fernsteuerung reverse-engineeren (Dazu gibt es zum Hubsan X4 schon einiges) - Die Hardware komplett entflechten (Ist wohl das kleinste Problem) - Coocox für Nuvoton in Betrieb nehmen. - Lernen wie man den Controller über den Bootloader neu flashed. - Multiwii auf Cortex M0 portieren und für die neue Umgebung konfigurieren. - Multiwii an den BK2423 anpassen. Alternative: - Kann man über SWD die original Firmware auslesen? - Wenn ja: Original-Firmware auslesen und recompilieren.
Torsten C. schrieb: > Was soll sich denn da ergeben? Will die im Ernst jemand disassemblieren? Ist doch die frage ! In was für einer programmier Sprache ist das wohl geschrieben? Ich kenn mich nur ein wenig in asm pic aus.
Davis schrieb: > Ja. Styroporfüßchen. Ich habe meinem 4 Gummideämpfer verpasst die mit einem Standart RC-Servo geliefert wurden. Passen genau unter die Motoren.
Warum Multiwii? Warum nicht lieber ein fertiges für ARM? Openpilot bzw. Taulabs? Oder eines der vielen anderen?
Angehängte Dateien:
-

IMAG0449_1_.jpg
1,1 MB

Die Fernbedienung hat auf der Rückseite eine Portbeschriftung. S11 und S12 sind nicht bestückt. Irgendwer eine Idee was da drann war?
Testi schrieb: > Warum Multiwii? > > Warum nicht lieber ein fertiges für ARM? > > Openpilot bzw. Taulabs? > > Oder eines der vielen anderen? Hi Testi, wie sieht es denn mit dem Speicherbedarf von Openpilot und Taulabs aus? Auf der ersten Blick scheinen die eine Menge Zusatzfunktionen zu haben? Immerhin gibt es nur 16kb flash. Multiwii erschien mir eine recht speichersparende Lösung zu sein. Kennst Du noch andere?
liquidMiakdo schrieb: > Davis schrieb: >> Ja. Styroporfüßchen. > > Ich habe meinem 4 Gummideämpfer verpasst die mit einem Standart RC-Servo > geliefert wurden. Passen genau unter die Motoren. Kannst du ein Bild oder Link von den Gummidämpfern posten?
liquidMiakdo schrieb: > Die Fernbedienung hat auf der Rückseite eine Portbeschriftung. > S11 und S12 sind nicht bestückt. Irgendwer eine Idee was da drann war? Wenn man denn lesen könnte, was da an den Bohrungen steht, wäre man schon weiter.
liquidMiakdo schrieb: > Die Fernbedienung hat auf der Rückseite eine Portbeschriftung. > S11 und S12 sind nicht bestückt. Irgendwer eine Idee was da drann war? Kannst Du eine Nahaufnahme des Tranceiver-Moduls machen? Was steht auf dem microcontroller auf der anderen Seite?
Also bei der Bezeichnung S würde ich auf Taster tippen... Speicherbedarf bei Taulabs ist groß. Aber wenn man alles rausschmeißt was man nicht brauch (viele Sensoren zusätzlich usw.) kann es vielleicht passen. Und man müsste halt es halt auch noch so umbauen das es ohne den Bootloader läuft. Oder man muss noch mehr umbauen so das es ohne das PiOS läuft. Die Hardware ist ja fest bei uns. Ich habe mal gerade nachgesehen die standart Firmware fürs f3 ist 167kb groß.
Turbonator schrieb: > Ich kenn mich nur ein wenig in asm pic aus. Das ist kein "pic" sondern ein "arm" (oben links unter www.mikrocontroller.net, Home und AVR kommt ARM). Und wenn man die Firmware ausliest, kommt das unleserliches Assembler heraus. Turbonator schrieb: > In was für einer programmier Sprache ist das wohl geschrieben? Schwer zu sagen, die Antwort hilft aber auch nicht weiter, da man Assembler nicht wieder in diese "Sprache" zurückwandeln kann. Tim . schrieb: > Original-Firmware auslesen und recompilieren. Du meinst reassemblieren, oder? Ohne Kommentare und sprechende Variablennamen kann man damit aber m.E. kaum was anfangen.
Hallo, ist der auf Ebay.de zu findende JD-185 der gleiche wie der JXD-385? Also gleiche Elektronik? VG
Franz N. schrieb: > Hallo, > > ist der auf Ebay.de zu findende JD-185 der gleiche wie der JXD-385? Also > gleiche Elektronik? > > VG http://www.china-gadgets.de/gadget/hubsan-x4-h107-micro-quadrocopter/
Aus dem Artikel (Danke!) lese ich, dass man also den JD-185 für 25eur (Standort: Deutschland) kaufen kann und damit nicht auf den China Versand warten muss? :-)
Franz N. schrieb: > ist der auf Ebay.de zu findende JD-185 der gleiche wie der JXD-385? Also > gleiche Elektronik? Sicher ist nichts. Der Hersteller heisst "JXD" und das Modell "JD-385".
Hm, es gibt in der auch einen JD-185, hier etwa für 30 aus .uk http://www.ebay.co.uk/itm/6-Axis-2-4Ghz-4CH-RC-Remote-Radio-Control-Helicopter-GYRO-UFO-Flying-JD-185-Mini-/231065258307
hubsi schrieb: > Hm, es gibt in der auch einen JD-185, hier etwa für 30 aus .uk > http://www.ebay.co.uk/itm/6-Axis-2-4Ghz-4CH-RC-Remote-Radio-Control-Helicopter-GYRO-UFO-Flying-JD-185-Mini-/231065258307 Plus GBP 4,48 Versand.
hubsi schrieb: > Hm, es gibt in der auch einen JD-185, hier etwa für 30 aus .uk > http://www.ebay.co.uk/itm/6-Axis-2-4Ghz-4CH-RC-Remote-Radio-Control-Helicopter-GYRO-UFO-Flying-JD-185-Mini-/231065258307 Plus GBP 4,49 Versand.
Mit GBP habe ich schlechte Erfahrungen gemacht. Da als ungeschriebene Regel gilt, dass erst Strafsachen ab etwa 1.000 Euro überhaupt verfolgt werden, passieren leider oft Betrügereien im kleineren Rahmen. Kollege von mir wollte sich günstiger als ich ein neues Handy kaufen, dachte sich, er könne beim Kauf aus GB nochmal ein paar Euro sparen ... war schlussendlich ein teurer Spass.
Nachbauer schrieb: > Mit GBP habe ich schlechte Erfahrungen gemacht. > Da als ungeschriebene Regel gilt, dass erst Strafsachen ab etwa 1.000 > Euro überhaupt verfolgt werden, passieren leider oft Betrügereien im > kleineren Rahmen. In diesem Fall sollte PayPal davor schützen. Habe schon oft aus UK ohne Probleme bestellt.
Hab noch einen entdeckt, der der gleiche sein könnte: http://www.ebay.de/itm/RC-Ferngesteuert-Quadrocopter-Quadcopter-Multicopter-Drone-UFO-Schwarz-NEU-/171129650792?pt=RC_Modellbau&hash=item27d81f3e68 Versand aus DE...
So hab mich jetzt da mal ein wenig beschäftigt. Ich denke der Quadrocopter benutzt das HiSKY protocol. Dieses wurde bereits für Deviation nachgebaut. http://www.deviationtx.com/forum/protocol-development/1822-hisky-protocol?limitstart=0&start=80 Ich werde mir mal einen zulegen und mit meiner Devo Fernsteuerung testen. Grüße, Kille EDIT: Warscheinlich doch ein anderes. Aber auch dieses scheint schon zu existieren: http://www.deviationtx.com/forum/protocol-development/1647-v202-protocol?limitstart=0&start=200
:
Bearbeitet durch User
So wie es aussieht, benutzen die alle das gleiche Protokoll: http://www.rcgroups.com/forums/showthread.php?t=1902350&page=10 Ich habe mal einen bestellt (http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=171129650792&clk_rvr_id=532053641700) und werde berichten...
Der Quadro aus Deutschland hat aber ne Andere Fernbedienung als der aus China ist mir grade aufgefallen. Super wäre es wenn jemand die Software auslesen könnte. Dann würde ich mir auch Direkt einen Bestellen wenn ich den Selbst nen bisschen umschreiben könnte.
Sascha E. schrieb: > Der Quadro aus Deutschland hat aber ne Andere Fernbedienung als der aus > China ist mir grade aufgefallen. > Das ist unerheblich, solange das Protokoll das gleiche ist. > Super wäre es wenn jemand die Software auslesen könnte. > Dann würde ich mir auch Direkt einen Bestellen wenn ich den Selbst nen > bisschen umschreiben könnte. Das wird dir aber dann auch nix bringen. Das ist dann noch lange kein C-Code! Jedoch ist zuminderst der Teil des Protokolls der Fernsteuerung schon da. Siehe mein Link. Das müsste das Hisky Protokoll sein... Damit könnte schon ein fähiger Software Entwickler (ich bin das leider nicht) eine alternative Firmware für den schreiben.
Martin Schröer schrieb: > @Turbo: > > Korrekt, 22€ sind die Freigrenze ohne Einfuhrsteuer, mehr als 22€ bis > 150€ kostet 19% Einfuhrsteuer und ab 150€ kommen tatsächlich Zölle > drauf. > Zu beachten ist, dass es dabei immer um die Summe inklusive Versand > geht. Gut zu wissen. Z.Z ist der Wechselkurs bei Paypal schlecht weswegen es über 22 Euro wären. Also besser nicht bestellen weil sonst 19% drauf kommen würden und man das Paket dann wo umständlich abholen müsste?
Ich hab Ratsuchend schrieb: > Martin Schröer schrieb: >> @Turbo: >> >> Korrekt, 22€ sind die Freigrenze ohne Einfuhrsteuer, mehr als 22€ bis >> 150€ kostet 19% Einfuhrsteuer und ab 150€ kommen tatsächlich Zölle >> drauf. >> Zu beachten ist, dass es dabei immer um die Summe inklusive Versand >> geht. > > Gut zu wissen. Z.Z ist der Wechselkurs bei Paypal schlecht weswegen es > über 22 Euro wären. Also besser nicht bestellen weil sonst 19% drauf > kommen würden und man das Paket dann wo umständlich abholen müsste? Ich hab es für 22,50€ bestellt ,gestern in 3 wochen kann ich es dir sagen :)
http://www.youtube.com/watch?v=1HkI00suQDs zeigt wie einer das Teil mit einer anderen Fernbedienung verwendet, sieht schon aus als sprächen alle die gleiche Sprache.
Turbonator schrieb: > Ich hab es für 22,50€ bestellt ,gestern in 3 wochen kann ich es dir > sagen :) Hat da jemand eine Erfahrung ob der Zoll wirklich wegen 50cent mehr die 19% verlangt?
Ratsuchend schrieb: > Turbonator schrieb: >> Ich hab es für 22,50€ bestellt ,gestern in 3 wochen kann ich es dir >> sagen :) > > Hat da jemand eine Erfahrung ob der Zoll wirklich wegen 50cent mehr die > 19% verlangt? Rechne die EUst aus. Ist sie kleiner als 5 Euro, wird sie nicht erhoben.
cyblord ---- schrieb: > Rechne die EUst aus. Ist sie kleiner als 5 Euro, wird sie nicht erhoben. Ah gut zu wissen. Mir geht es nicht um die knapp 5 Euro mehr sondern das ich keine Lust und Zeit habe zum Zollamt zu gehen. Aber 19% von 22,50 sind ja unter 5 Euro.
Du musst auch nicht umbedingt zum Zollamt wenn der betrag über 22€ ist. Es reciht wenn ausen sichtbar eine Rechnung auf dem Paket angebracht wird. Dann wird dir das Paket auch nach Hause gebracht und dein Postbote nimmt dir dan das Geld ab. Du musst nur zum Zollamt wenn am Paket keine Rechung angebracht ist da der Zollbeamte das Paket ja nicht öffnen darf und somit nicht weiß was in dem Paket ist und wie viel der Inhalt gekostet hat. Gelegentlich Funktioniert es wenn der versender es als Geschenk oder Muster Deklariert. Als auf meinen Letzten Paket aller dings draufstandt 5000x Samples haben die beim Zoll das woll nicht ganz so geglaubt und ich musste es doch abhollen.
Manchmal habe ich auch einen Brief vom Zollamt bekommen. Ich habe dann einfach per Email (ja, das geht!) die Paypal-Abrechnungen, die Ebay-Nummer und sowas als PDF-Anhang geschickt und wenige Tage später lag das "Item" dann kommentarlos in meinem Briefkasten (sofern die 22€ unterschritten waren).
Oliver Stellebaum schrieb: > einfach per Email (ja, das geht!) die Paypal-Abrechnungen, > die Ebay-Nummer und sowas als PDF-Anhang geschickt Dumm nur, wenn man nicht weiß, was da gerade beim Zoll liegt, weil mehrere Sendungen unterwegs und überfällig sind... ...
Hannes Lux schrieb: > Dumm nur, wenn man nicht weiß, was da gerade beim Zoll liegt, weil > mehrere Sendungen unterwegs und überfällig sind... Notfalls kann man vorher nachfragen, wer der Absender ist (wobei das meist auch nicht wirklich hilft) oder sogar fragen was drin ist (machen die aber alles andere als gerne) aber wenn es gar nicht anders geht kann das helfen. Wegen Zoll bitte ich noch zu beachten, dass denen völlig egal ist, welchen Wechselkurs PayPal verwendet. Die berechnen den Wechselkurs nach einem eigenen Verfahren [1] Viele Grüße [1] http://www.zoll.de/DE/Fachthemen/Zoelle/Zollwert/Aktuelle-Umrechnungskurse/Umrechnungskursarten/umrechnungskursarten_node.html;jsessionid=C6AE75B857F98C2448D6D0C7DCD4083B
Jetzt aber zurück zum Wesentlichen. DEN Quadcopter. Gibt es schon weitere Erkenntnisse bezüglich der Firmware oder ob man eine eigene aufspielen kann?
Oliver Stellebaum schrieb: > ob man > eine eigene aufspielen kann? Das kann man mit Sicherheit. Die notwendigen Anschlüsse sind herausgeführt. Für etwa € 35.- bekommst du ein Nulink Interface. Ein Bootlader über die Sellerieschnitte wird vermutlich nicht drauf sein - auch, wenn es den bei Nuvoton gibt, einschließlich Steuerprogramm für den PC.
Georg G. schrieb: > Ein > Bootlader über die Sellerieschnitte wird vermutlich nicht drauf sein - > auch, wenn es den bei Nuvoton gibt, einschließlich Steuerprogramm für > den PC. Aber warum ist dann die serielle Schnittstelle herausgeführt? Ich werde am WE mal versuchen einen LA daran zu hängen. Vielleicht sieht man ja etwas. Leider ein ziemlich kleiner pitch...
> Aber warum ist dann die serielle Schnittstelle herausgeführt? Ich werde > am WE mal versuchen einen LA daran zu hängen. Vielleicht sieht man ja > etwas. Leider ein ziemlich kleiner pitch... Gibt es keinen Experten Modus? Stick reindrücken/klicken ?
Georg G. schrieb: > Die notwendigen Anschlüsse sind > herausgeführt. Für etwa € 35.- bekommst du ein Nulink Interface. Ich habe mal geschaut, wie man den 10-Pin Nuvoton ICE Connector "ICEJP8" des Nu-Link-Me Debug Adapters damit verbindet. 2 - VDD (3,0V) 4 - dta 6 - clk 8 - rst 10 - GND Die anderen Pins sind nicht genutzt. Das "NuTiny-SDK-Mini51"ist teurer als der Helikopter: http://www.digikey.de/product-detail/de/NUTINY-SDK-MINI51/NUTINY-SDK-MINI51-ND/3065250 Aliexpress meint dazu nur "Do you mean: nudity?" ;-) Da ich bei Digikey nicht bestellen kann: Wo bekommt man den? Tim . schrieb: > Die Neuprogrammierung per ISP scheint sich etwas komplexer zu gestalten. Wo erwartetst Du Probleme?
Torsten C. schrieb: > Ich habe mal geschaut, wie man den 10-Pin Nuvoton ICE Connector "ICEJP8" > des Nu-Link-Me Debug Adapters damit verbindet. > > 2 - VDD (3,0V) > 4 - dta > 6 - clk > 8 - rst > 10 - GND Das sind die normalen SWD Anschlüsse.
:
Bearbeitet durch User
Torsten C. schrieb: > Tim . schrieb: >> Die Neuprogrammierung per ISP scheint sich etwas komplexer zu gestalten. > > Wo erwartetst Du Probleme? Man benötigt proprietäre HW (kein USB zu RS232) und das Protokoll ist nicht dokumentiert.
Torsten C. schrieb: > Aliexpress meint dazu nur "Do you mean: nudity?" ;-) bei alibaba gibt es einen anbieter: http://www.alibaba.com/product-gs/804555783/KIT_EVAL_NUMICRO_MINI51_NUTINY_SDK.html
nosilent schrieb: > Torsten C. schrieb: >> Aliexpress meint dazu nur "Do you mean: nudity?" ;-) > > bei alibaba gibt es einen anbieter: > http://www.alibaba.com/product-gs/804555783/KIT_EVAL_NUMICRO_MINI51_NUTINY_SDK.html wahrscheinlich ist aber ein nachgebauter Keil Ulink günstiger: http://www.ebay.com/itm/Ulink-2-USB-JTAG-Emulator-ARM9-Cortex-Keil-Ulink-II-GH2-White-Adapter-Debug-G6-/200942168148?pt=LH_DefaultDomain_0&hash=item2ec9162854
Angeblich kann man die STM Discovery-Boards auch als generellen SWD-Adapter missbrauchen. Das lässt sich vom Preis her kaum unterbieren. Habe mich allerdings noch nicht damit beschäftigt.
Also auf Discovery Boards kann man Versaloon aufspielen. http://www.versaloon.com Und Versaloon unterstützt OpenOCD http://openocd.sourceforge.net/ Und OpenOCD unterstützt die Nuvoton Mini54 Serie. Soweit ich das jetzt alles verstanden habe. Die Frage ist, ob das auch alles zusammen so funktioniert.
Angehängte Dateien:
-

DiscoverySWD.png
170 KB

Tim . schrieb: > Angeblich kann man die STM Discovery-Boards auch als generellen > SWD-Adapter missbrauchen. Manuel Steiner schrieb: > Also auf Discovery Boards kann man Versaloon aufspielen. Das sind m.E. zwei ganz unterschiedliche Vorschläge. Auf dem Disco ist ja bereits ein SWD, ohne dass man da irgendwas "aufspielt". CooCox habe ich installiert, ein Disco habe ich auch da. Ich werde aber wohl dieses Wochenende nicht mehr dazu kommen, das auszuprobieren.
Soweit ich weiß, sind aber nicht alle SWD Protokolle von allen Herstellern gleich. Also ich meine mal wo gelesen zu haben, dass STM SWD nur zur Programmierung von STM MCUs zu gebrauchen ist, weil eben das Protokoll proprietär ist. Ich kann mich natürlich auch irren.
Manuel Steiner schrieb: > Soweit ich weiß, sind aber nicht alle SWD Protokolle von allen > Herstellern gleich. Also ich meine mal wo gelesen zu haben, dass STM SWD > nur zur Programmierung von STM MCUs zu gebrauchen ist, weil eben das > Protokoll proprietär ist. vielleicht ist es doch nicht proprietär: http://www.arm.com/products/system-ip/debug-trace/coresight-soc-components/serial-wire-debug.php zumindest für die ARM Cortex Mikrocontroller sollte es gleich sein: > SWD is compatible with all ARM processors and any processor using JTAG for debug > and provides access to debug registers in Cortex™ processors (A,R,M) and the > CoreSight debug infrastructure.
so wir (steinerhippo und ich) haben den SWD von einem STM32F4Disocervy mit einem NXP LPC1343 verbunden und das Target wird von Keil erkannt. Verbundene Pins für eine erfolgreiche Kommunikation: LPC1343 SWD STM32F4Discovery SWDIO/TMS SWDIO SWDCLK/TCK SWDCLK nRESET NRST VTREF VDD_TARGET Wir gehen davon aus, dass es auch mit den Novoton uCs funktioniert. Unser Quadcopter ist noch auf dem Weg...
Na so kann man sich irren :) Dann sind doch so Discovery Boards echt eine feine Sache. Wie nosilent bereits geschrieben hat, ist unser Quadcopter noch auf dem Weg, evtl. kommt ja vor uns noch jemand anderes dazu, mal ein Discovery oder Ähnliches an die SWD Schnittstelle zu hängen.
Andere Möglichkeit ist der CoLink-Ex: http://www.coocox.org/CoFlash_Programmer.htm http://www.coocox.org/CoLinkExGuide/Buy_CoLinkEx.htm Hat ja nicht jeder Keil... Wäre schön, wenn es noch eine freie Software geben würde um den F4 SWD mit den Nuvotons ans rennen zu bekommen.
Keil gibt es bis 32Kb kostenlos. reicht also für den Quadrocopter. Weiß nur nicht ob Keil auch die Nuvoto drin hat. Hab hier meinen Quad liegen und nen Segger J-Link Edu. Der kann die Nuvoto Mini 54. Coocox wohl auch oder? Bringt mir nur beides nichts, da ich keine Ahnung habe wie man dafür ne Firmware schreibt... Bin bei ARM noch am Anfang und am lernen...
:
Bearbeitet durch User
Wenn das Discoveryboard mit Keil den MINI54ZAN beschreiben kann, ist das Programmierproblem schon fast gelöst. Die freie MDK-Version kann bis 32kb Flash, der Controller hat nur 16kb... http://www.keil.com/arm/selector.asp
No y. schrieb: > Keil gibt es bis 32Kb kostenlos. reicht also für den Quadrocopter. Weiß > nur nicht ob Keil auch die Nuvoto drin hat. Oh, da hatten wir den gleichen Gedanken. Keil kennt den Controller: http://www.keil.com/dd/chip/6142.htm Allerdings bin ich mir noch nicht sicher, wie ich den im Projekt einstelle...
Ich hab hier mal eine Anleitung für eine andere Nuvoton Serie gefunden. http://webshop.atlantikelektronik.de/Webpage/NUC1xx%20Quick%20Start%20Guide%20for%20Keil%20uVision4.pdf Sieht wohl so aus, als müsste man Nuvoton MCUs als generische ARM MCUs behandeln (im Fall des MINI54ZAN ein generischer Cortex M0). Wie es allerdings dann mit den spezifischen Settings aussieht, weiß ich auch noch nicht...
No y. schrieb: > da ich keine Ahnung habe wie man dafür ne > Firmware schreibt... Na, dann ist das doch genau das richtige Projekt um das zu lernen. Ich fände es jedenfalls spannender als zum tausendsten Mal einen Roboter zu bauen, der auf einem Strich entlang fährt oder die anderen typischen Anfänger-Projekte. Tim . schrieb: > Aber warum ist dann die serielle Schnittstelle herausgeführt? Die kann noy z.B. nutzen, um bei seinen ersten Versuchen mit dem Quadkopter über die serielle Schnittstelle am Kabel (oder über einen BTM-222) zu reden: Ich würde damit anfangen, per serieller Schnittstelle erstmal die Motoren mit geringer Drehzahl anzusteuern und die Daten aus dem MPU-6050 auszulesen, um ein Gefühl für die Werte zu bekommen. Entweder man macht dann mit Bluetooth weiter oder man leitet die Daten vom Nrf24L01 an die serielle Schnittstelle und analysiert die Bytes, damit man erkennt, wie die Hebelstellungen der Fernbedienung übertragen werden. Und so tastet man sich dann langsam vor. Es kam ja auch schon der Vorschlag, vorhandene Projekte (Paparazzi, Flyduino, ...) zu portieren. Ich denke, es macht Sinn, mal hinein zu scchauen, um zu sehen wie andere die Flugstabilisierung gemacht haben. Ich hab' mal "laut gedacht", vielleicht hat noch jemand bessere Vorschläge.
:
Bearbeitet durch User
Torsten C. schrieb: > Ich würde damit anfangen, per serieller Schnittstelle erstmal die > Motoren mit geringer Drehzahl anzusteuern und die Daten aus dem MPU-6050 > auszulesen, um ein Gefühl für die Werte zu bekommen. Hab ich mir auch in etwa so gedacht. Evtl kann man hier auch gleich über ein Nrf24L01, welches über USB o.Ä. am PC verbunden ist mit dem Funkmodul am Quadcopter kommunizieren (über ein Terminal oder so dann Werte für den Motor senden, ...). Dann hätte man gleich die vorhandene Funkschnittstelle benutzt und man benötigt kein Kabel. Dass die ganze Sache eventuell einen kleinen Mehraufwand am Anfang bedeutet, ist natürlich klar. Ich denke man sollte sich erstmal mit den Gegebenheiten vertraut machen und in etwa herausfinden, wie man mit dem Quadcopter umgehen muss, bevor man gleich versucht größere, bereits vorhandene Softwarelösungen zu portieren. Gegen Hineinschnuppern und nach vorhandenen Lösungen sehen, spricht ja überhaupt nichts. Auch gegen das Portieren nicht, ich glaube nur, dass dies nur in Frust endet, wenn man zuvor nicht genau verstanden hat, wie der Quadcopter zu handhaben ist.
Manuel Steiner schrieb: > Evtl kann man hier auch gleich über ein Nrf24L01, welches über USB o.Ä. > am PC verbunden ist mit dem Funkmodul am Quadcopter kommunizieren (über > ein Terminal oder so dann Werte für den Motor senden, ...). Dafür musst du aber trotzdem den SPI-Verkehr zum nRF24L01 einmal mit plotten um herauszubekommen auf welchen Kanal (1...125) und welche Adresse (5 Byte) kommuniziert wird. Der Rest ist dann einfach, habe ich bei meiner LG Funkmaus mit nRF24L01 auch schon gemacht.
http://conference.hitb.org/hitbsecconf2011ams/materials/D2T3%20-%20Travis%20Goodspeed%20-%20Building%20a%20Promiscious%20nRF24L01%20Packet%20Sniffer.pdf bzw http://travisgoodspeed.blogspot.de/2011/02/promiscuity-is-nrf24l01s-duty.html Es gibt auch Wege, das einfacher zu sniffen ;)
Naja die 3,4 Leitungen sind schnell an den Chip geklatscht (kommt man ja noch ganz gut ran) und dann eben die SPI-Daten über den UART rauszuhauen geht wohl schneller als sich erst das ominöse Board zu besorgen (falls es das überhaupt noch gibt). Aber wo du gerade den A7125 ins spiel gebracht hast... evtl. wäre das $3-Modul mit A7125 mal ganz interessant für zukünftige sniffereien: http://www.elecfreaks.com/store/24ghz-easy-radio-de-a7125-modulemasterslave-p-167.html Bringt natürlich nichts wenn die Copter 250kbit verwenden, da das a7125 nur 1 und 2 Mbit kann. Und das ding hat auch weniger Kanäle (2.400-2.483 GHz) die nRF - falls sie denn mal von so einem Copter genutzt werden - haben 125 Kanäle (also bis 2.525 GHz)
:
Bearbeitet durch User
Timmo H. schrieb: > Manuel Steiner schrieb: >> Evtl kann man hier auch gleich über ein Nrf24L01, welches über USB o.Ä. >> am PC verbunden ist mit dem Funkmodul am Quadcopter kommunizieren (über >> ein Terminal oder so dann Werte für den Motor senden, ...). > Dafür musst du aber trotzdem den SPI-Verkehr zum nRF24L01 einmal mit > plotten um herauszubekommen auf welchen Kanal (1...125) und welche > Adresse (5 Byte) kommuniziert wird. Der Rest ist dann einfach, habe ich > bei meiner LG Funkmaus mit nRF24L01 auch schon gemacht. Mein Ansatz war eher (wenn einem der original Funkverkehr egal ist), selbst Sende- und Empfangsroutine zu implementieren. Dann kann ich das doch alles selbst einstellen, wenn ich mich nicht irre. Das müsste dann ausreichen, um einfache Kommandos drahtlos an den Quadcopter zu übertragen, um mal zu testen wie sich der so verhält. Die ganze Motoransteuerung und Stabilisationssache muss ja sowieso neu programmiert werden. Wenn man den Quadcopter jedoch mit der orignial Fernbedienung weiterhin verwenden will, ist es wohl sehr sinnvoll, das Ganze mal mitzuloggen. nosilent und ich haben eher vor, den Quadcopter ohne Fernbedienung autonom mit eventuell ein paar Sensoren fliegen zu lassen. Aber die Kommandos von der Fernbedienung wären wohl trotzdem interessant, falls man Autonomie mit Fernsteuerung mal verbinden will.
Das Protokoll haben netterweise schon Andere reverse engineered. Es ist unter der Bezeichnung V2x2 Protokoll bekannt, und wird von Deviation, einer Universalfernsteuerungssoftware untestützt: http://www.deviationtx.com/forum/protocol-development/2111-protocols-chips-and-hardware Den Quellcode der Firmware gibt es hier: https://bitbucket.org/PhracturedBlue/deviation/downloads Der relevante Teil liegt hier: https://bitbucket.org/PhracturedBlue/deviation/src/c960b8ea4e77/src/protocol?at=default V202...
Hier ist ein Forenthread, in dem das Protokoll diskutiert wird: http://www.deviationtx.com/forum/protocol-development/1647-v202-protocol
Angehängte Dateien:
-

nrf24.jpg
60 KB
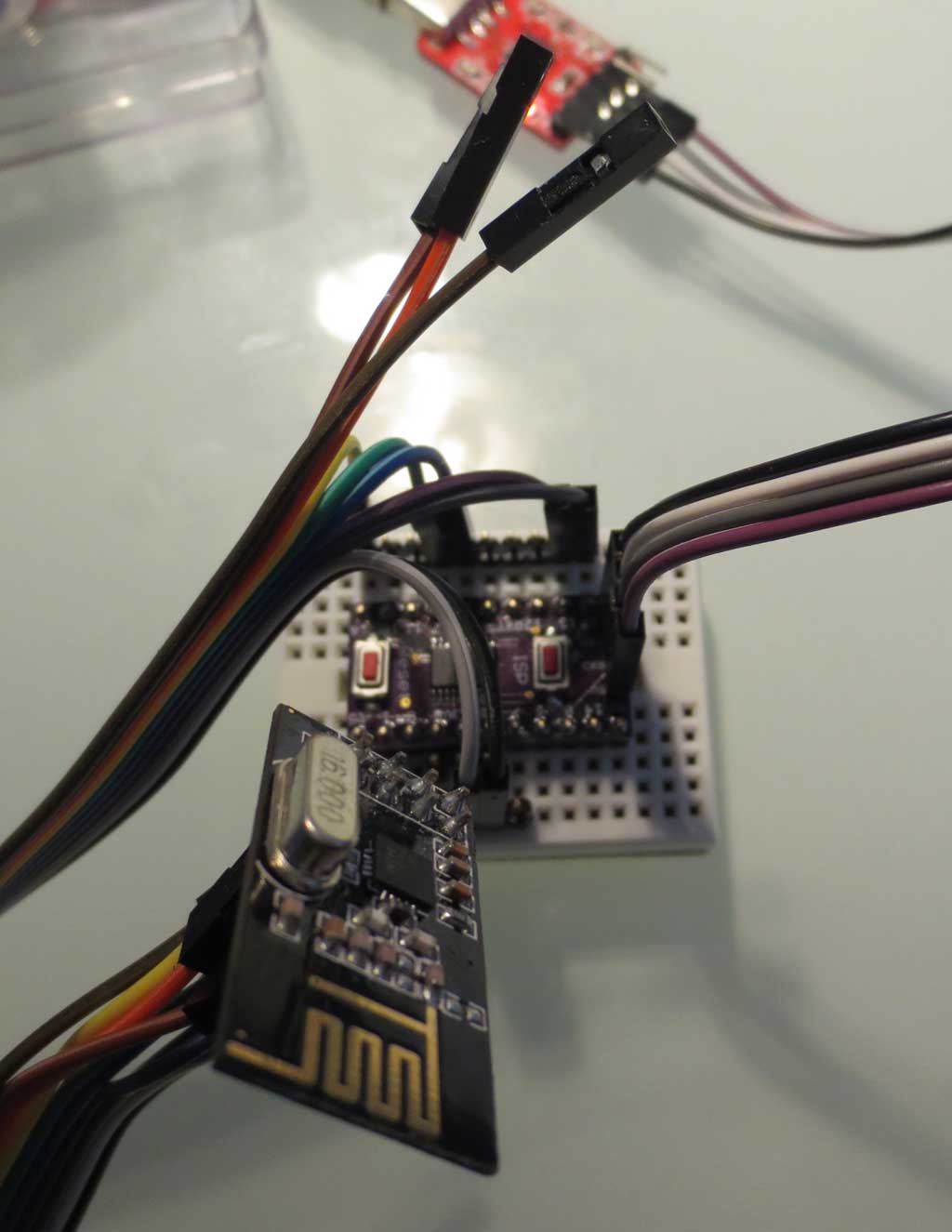
Einen kleinen Erfolg kann ich vermelden: Es hat sich als relativ einfach herausgestellt, das Protokoll der FB zu empfangen. Mit Hilfe eines nRF24L01+ Moduls an einem LPC812 (NXP Cortex M0+ MCU) war das kein Problem. Channel-Hopping habe ich nicht implementiert, man kann aber auf einem konstanten Kanal bereits etliche Datenpackete pro Sekunde empfanden. Source für den LPC812 anbei. Er sollte sich relativ einfach auf AVR/Arduino portieren lassen. Dazu muss "radiopinfunction.c" angepasst und main.c um die Hauptschleife neu geschrieben werden. Das Datenformat ist relativ einfach. Es werden 16 Byte-Pakete verschickt. Dump einiger Datenpakete:
1 | > 74 99 00 00 40 40 3E 1F E4 75 00 00 00 00 00 43 |
2 | > 80 99 00 00 40 40 3E 1F E4 75 00 00 00 00 00 4F |
3 | > FF 00 00 00 40 40 3E 1F E4 75 00 00 00 00 00 35 |
4 | > FF 00 00 00 40 40 3E 1F E4 75 00 00 00 00 00 35 |
5 | > FF 14 00 00 40 40 3E 1F E4 75 00 00 00 00 00 49 |
6 | > FF 15 00 00 40 40 3E 1F E4 75 00 00 00 00 00 4A |
Das Format der Datenpakete (siehe auch https://bitbucket.org/rivig/v202/src)
1 | Byte Function Range |
2 | 0 Throttle 0-255, note: Trim will be added by remote control |
3 | 1 Yaw bit 7 indicates direction, value in [6:0] depends on speed button settings |
4 | 2 Pitch bit 7 indicates direction, value in [6:0] depends on speed button settings |
5 | 3 roll bit 7 indicates direction, value in [6:0] depends on speed button settings |
6 | 4 trim yaw 2-126, 64 is neutral |
7 | 5 trim pitch 2-126, 64 is neutral |
8 | 6 trim roll 2-126, 64 is neutral |
9 | 7 txid1 Unique ID, 0x1fe475 in my RC |
10 | 8 txid2 Unique ID, 0x1fe475 in my RC |
11 | 9 txid3 Unique ID, 0x1fe475 in my RC |
12 | 10 unused |
13 | 11 unused |
14 | 12 unused |
15 | 13 unused |
16 | 14 Flags 0x40 is "turning button" |
17 | 15 Checksum Used to determine next channel for channel hopping |
http://news.ebay.de/globalnews/item/show/1789?_trksid=p3984.m2301.l3955 > Hongkong Post hat vor kurzem angekündigt, dass alle per Luftpost aus > Hongkong versandten Briefe und Pakete fortan geröntgt werden. Diese > zusätzliche Überprüfung kann zu Lieferverspätungen führen, auf die der > Verkäufer keinen Einfluss hat. Wenn Sie einen Artikel von einem Verkäufer in > Hongkong gekauft haben, sollten Sie berücksichtigen, dass sich die Lieferung > um einige Zeit verspäten kann. Bitte rechnen Sie mit mindestens einer Woche > mehr als der vom Verkäufer ursprünglich angegebenen Lieferzeit.
Tim . schrieb: > Channel-Hopping habe ich nicht implementiert Von wem werden denn die neuen Kanäle festgelegt? Von der Fernsteuerung oder vom Quadkopter? Nach "Sender" oder "Empfänger" kann man ja hier nicht unterscheiden.
Fragen aus Neugier: Was wollt ihr eigentlich mit diesem Copter machen? Angenommen der uC lässt sich programmieren - was soll man dann daran ändern wollen? Das fliegt doch schon...
der_leser schrieb: > was soll man dann daran ändern wollen? Das fliegt doch schon... Zunächst denke ich, dass an der Flugstabilisierung noch einiges getan werden kann, denn ich schrieb: > Beim Steuern verliert er an Höhe, … Accel_Z wird zwar offenbar für die Regelung benutzt, aber die Regler sind m.E suboptimal ausgelegt. Aber die Frage ist natürlich in sofern berechtigt, als dass es noch gar kein "Brainstorming" hier gab, was man noch alles machen könnte. Fernsteuerung über Bluetooth (größere Entfernung oder auch vom Handy aus) kam ja bisher nicht so gut an ^^. Man könnte noch vorprogrammierte Kunstflugfiguren vorsehen und Ausgänge, um die Kamera zu steuern (Foto und Film Start/Stopp). Ein GPS-Empfänger ist vermutlich schon zu schwer, zumindest die 8€-Teile aus China. Gibt's sonst noch Ideen? PS: Oder ein LED-Streifen, der beim fliegen einen Schriftzug datstellt (POV-Display-Prinzip). PPS: Ich sollte mich langsam an die "Vorschau"-Funktion gewöhnen, sorry:
:
Bearbeitet durch User
Torsten C. schrieb: > noch gar kein "Brainstorming" ... Ach ja, noch einer: Da bereits ein Sender eingenaut ist, könnte man auch das Kamera-Bild senden. Ich habe ja noch vor, eine Handy-Kamera auszulesen, siehe Beitrag "Handy-Kamera: Welche Schnittstelle?"
der_leser schrieb: > Fragen aus Neugier: > Was wollt ihr eigentlich mit diesem Copter machen? > Angenommen der uC lässt sich programmieren - was soll man dann daran > ändern wollen? Das fliegt doch schon... nosilent und ich haben eher vor, den Quadcopter ohne Fernbedienung autonom mit eventuell ein paar Sensoren fliegen zu lassen. Mal sehen in wie weit sich das relisieren lässt, all zu viel Zusatzgewicht kann man ja nicht ranhängen, aber eine Minikammera wäre wirklich iteressant. Torsten C. schrieb: > PS: Oder ein LED-Streifen, der beim fliegen einen Schriftzug datstellt > (POV-Display-Prinzip). Das wäre z.B. auch interessant.
Manuel Steiner schrieb: > > nosilent und ich haben eher vor, den Quadcopter ohne Fernbedienung > autonom mit eventuell ein paar Sensoren fliegen zu lassen. Per Knopfdruck aus dem Auto-Schiebedach rausfliegen, Parkplatz von oben Scanen, Lücke finden, Bild mit dem "Weg" zum Parkplatz markieren.
Manuel Steiner schrieb: > autonom mit eventuell ein paar Sensoren Das klingt auch sehr interessant. Ultraschallsensoren sind zwar groß, aber leicht und billig (1€ pro Stück). Aber ich finde, das Prinzip taugt nicht so gut, wenn sich die Echo-Reflektoren (z.B. Personen) bewegen. Was habt Ihr vor? Falls Ihr einen leichten GPS-Empfänger findet, sagt bitte Bescheid. Eine serielle Schnittstelle für die NMEA-Daten hat der Quadcopter ja noch frei. PS: Per Nrf24L01 lassen sich ja auch DGPS-Daten übermitteln. PPS: Die Parkplatzsuche ist m.E. der beste Vorschlag und ließe sich mit GPS m.E. ganz gut umsetzen, auch wenn der Quadkopter in einer einfachen Lösung erstmal zurück fliegen muss, damit man das Foto sieht. Hallo schrieb: > Per Knopfdruck aus dem Auto-Schiebedach rausfliegen Ich stelle mir das gerade vor. Eine kleine Start-/Lande-Plattform unter dem Schiebedach mit Elektromagnet zum halten und kraftlosen Kontakten, um den LiPo zu laden. Cool. :-)
:
Bearbeitet durch User
Hallo schrieb: > Manuel Steiner schrieb: >> >> nosilent und ich haben eher vor, den Quadcopter ohne Fernbedienung >> autonom mit eventuell ein paar Sensoren fliegen zu lassen. > > Per Knopfdruck aus dem Auto-Schiebedach rausfliegen, Parkplatz von oben > Scanen, Lücke finden, Bild mit dem "Weg" zum Parkplatz markieren. Was ich meinte, muss auch kein richtiges Bild sein. Es reicht schon, wenn der QCopter über die Stelle stehen bleibt als Markierung. Man kann den auch so programmieren, dass bei "bekannten" Parkplätzen, z.B. Arbeit, Haus, da wo man oft parkt, der bei einer Annäherung automatisch rausfliegt (GPS) und die Arbeit vorleistet.
der Quadrocopter kann ja auch auf dem freien Platz parken & diesen freihalten, dabei sendet er ein Peilsignal oder in der einfachen version zuendet er eine Rauchpatrone... ;) vlG Charly
Von Vishay habe ich Infrarot Distanzsensoren gefunden, die im Normalbetrieb bis 20cm. Das Ganze in einem sehr kleinen Gehäuse. 20cm sind jetz nicht wirklich viel, aber für einige Sachen könnte man damit eventuell schon etwas anfangen. Vielleicht kennt jemand noch so kleine Alternativen mit höherer Reichweite? http://www.vishay.com/ppg?84150 Gibts auch quadratisch (4010) und noch einmal ähnlich (4020)
Charly B. schrieb: > der Quadrocopter kann ja auch auf dem freien Platz > parken & diesen freihalten, dabei sendet er ein Peilsignal > oder in der einfachen version zuendet er eine Rauchpatrone... > > ;) > > vlG > Charly Oder fängt an gefährlich wild zu rotieren, wenn ein anderes Auto parken will... "ich kratz dich gleich du Blechkiste..."
Hallo schrieb: > "ich kratz dich gleich du Blechkiste..." In Kombination mit einer (POV-) Laufschrift. Nett, aber alles m.E. etwas übertrieben. Manuel Steiner schrieb: > Infrarot Distanzsensoren Oh, Cool. Die wären auch für meinen Helokopter interessant, als Nahbereichs-Ergänzumg zu Ultraschall. Ich suche auch selbst nochmal. Bisher habe ich aber verstanden, dass die nicht die Zeit für das Echo auswerten, sondern nur die Lichtstärke. Das heißt bei dunklem Fußboden fliegt der QKopter niedriger als bei hellem, oder wie?
:
Bearbeitet durch User
Torsten C. schrieb: > Das heißt bei dunklem Fußboden > fliegt der QKopter niedriger als bei hellem, oder wie? Im Datenblatt steht zumindest: Excellent ambient light suppression by signal modulation. Wie exzellent das funktioniert kann ich allerdings nicht sagen, ich bin erst vor kurzem auf die Teile gestoßen und hatte sie noch nicht selbst im Einsatz.
Manuel Steiner schrieb: > Excellent ambient light suppression by signal modulation Ja, hab'ich auch gelesen. Dass heiß aber m.E. nur, dass er das Licht moduliert und nur die Amplitude (Spitze-Spitze) analysiert und ner Offset unterdrückt wird. Die Helligkeit des Reflektors (z.B. Fußboden^^) müsste theoretisch trotzdem gewaltig in den Messwert eingehen. Beim Sharp GP2D120 ist ein Diagramm im Datenblatt: "White paper (90% Reflectance)" und "Gray paper (18% Reflectance)" sind kaum unterschiedlich. Das verstehe ich nicht. PS: Alles andere wäre LIDAR, z.B. http://www.parallax.com/product/28044 … und viel zu teuer.
:
Bearbeitet durch User
Torsten C. schrieb: > Torsten C. schrieb: >> noch gar kein "Brainstorming" ... > > Ach ja, noch einer: Da bereits ein Sender eingenaut ist, könnte man auch > das Kamera-Bild senden. Ich habe ja noch vor, eine Handy-Kamera > auszulesen, siehe Beitrag "Handy-Kamera: Welche Schnittstelle?" Würdest Du die zum Laufen bringen, wäre das natürlich ideal - und würde mich auch über das Quad-Projekt hier hinaus interessieren. So lange das jedoch noch nicht gelungen ist, schiele ich immer noch in Richtung der bereits schon einmal erwähnten 808 keycams [die übrigens nur deutlich teurer als der Quad selbst zu bekommen sind :( ], zumal dafür schon einige Videos existieren, welche belegen, dass es damit auch praktisch funktioniert. Ich kann derzeit blöderweise "nur über den Zaun schauen", da mein(e) Quad(s) immer noch nicht geliefert sind - blöd. ----- P.S: ich habe noch keine 808er bestellt, erst einmal möchte ich den Hubsan (Klon) live in den Händen halten, um eine eigene Einschätzung vornehmen zu können. Kann ja so lange auch nicht mehr dauern ... (am 22.09. bestellt)
:
Bearbeitet durch User
der_leser schrieb: > was soll man dann daran ändern wollen? Das fliegt doch schon... Der Höhenverlust beim Steuern ist schon etwas nervig. Besonders bei hoher Geschwindigkeit muss man aufpassen, dass man keine Bruchlandung macht. Ich hätte auch gerne eine Höhenregelung. Also das der Quadcopter die höhe hält und man nicht so viel am Gas rum regeln muss (wie genau man das realisieren soll weiss ich nicht). Ein Abstandssensor wäre auch nicht schlecht zur Höhenregelung. Bei 20cm könnte man zumindest kurz vorm Aufprall noch was abfangen :) Wie verhält sich der Quadcopter bei euch eigentlich wenn der Akku leer ist? Mir ist es jetzt schon ein paar mal passiert, dass er sich bei leeren Akku einfach ausschaltet - ungünstig wenn man gerade etwas höher fliegt. Oder er schaltet sich ab sobald man einen Flip ausführen will. Das könnte man in der Software auch ändern, dass die Motorleistung langsam auf Null runter gefahren wird.
Bei mir wird sie das auch? Irgendwann hat man auch bei vollgas nurnoch leichten Sinkflug und 5sec später geht der Copter dann aus....
Meiner schaltet sich auch einfach aus. Wobei er dann mit der Kalibrierung der Fluglage anfängt, könnte also auch mit einer Brown Out Detection zu tun haben
Chris L. schrieb: > könnte also auch mit einer Brown Out > Detection zu tun haben Jo, habe ich mir auch schon gedacht. Auf jeden Fall etwas, dass man verbessern könnte (auch schon durch einfaches Deaktivieren des Brown-Out).
Torsten C. schrieb: > Manuel Steiner schrieb: >> Infrarot Distanzsensoren > > Oh, Cool. Die wären auch für meinen Helokopter interessant, als > Nahbereichs-Ergänzumg zu Ultraschall Ich habe soeben ein paar Samples von 3020, 4010 und 4020 erhalten. Wenn ich Zeit habe, werde ich mal testen, wie sich das mit unterschiedlichen Bodenbeschaffenheiten verhält. @nosilent: Ich hoffe du liest hier fleißig mit, die Dinger sind richtig klein und wollen wo aufgelötet werden :P
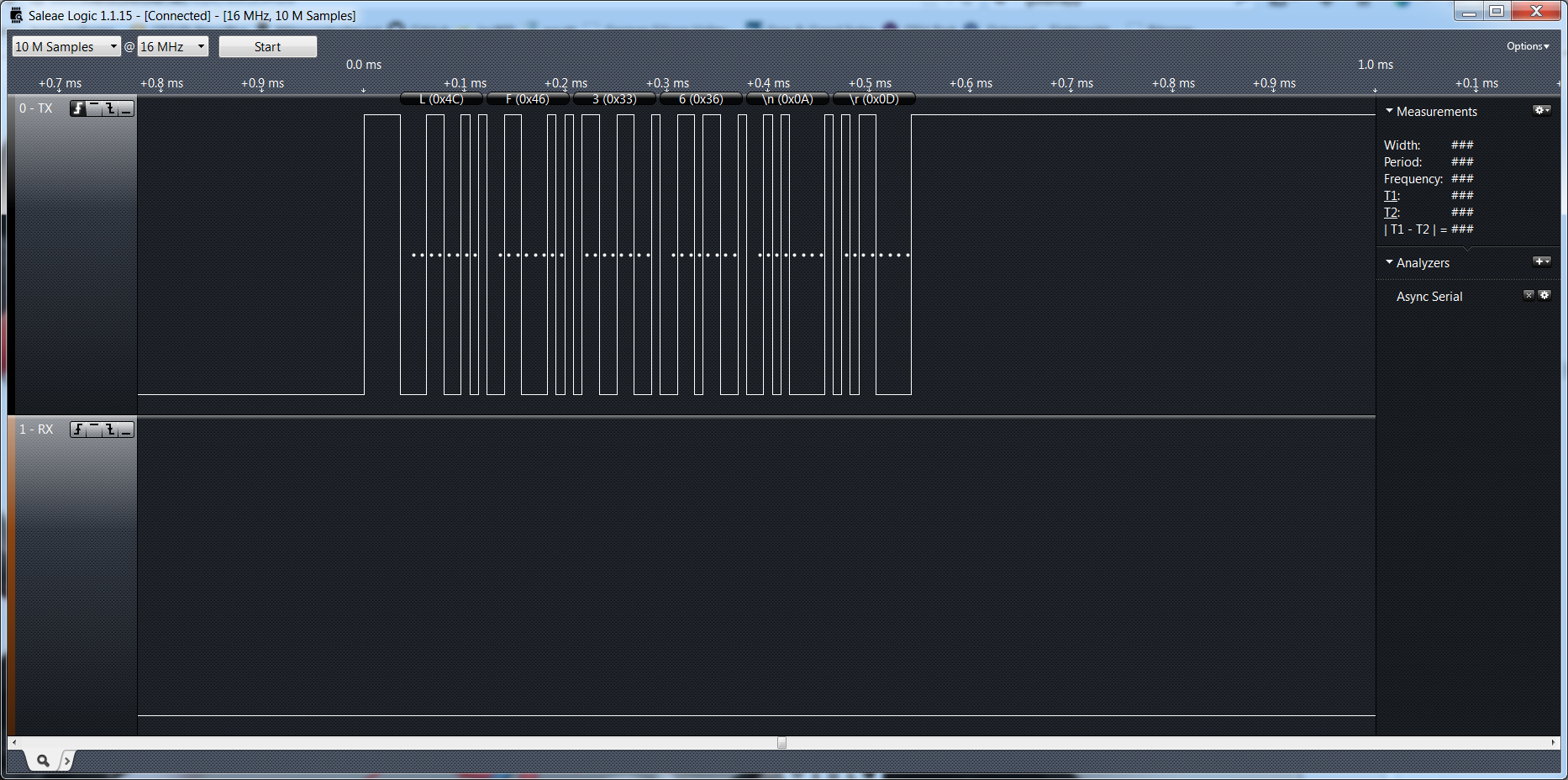
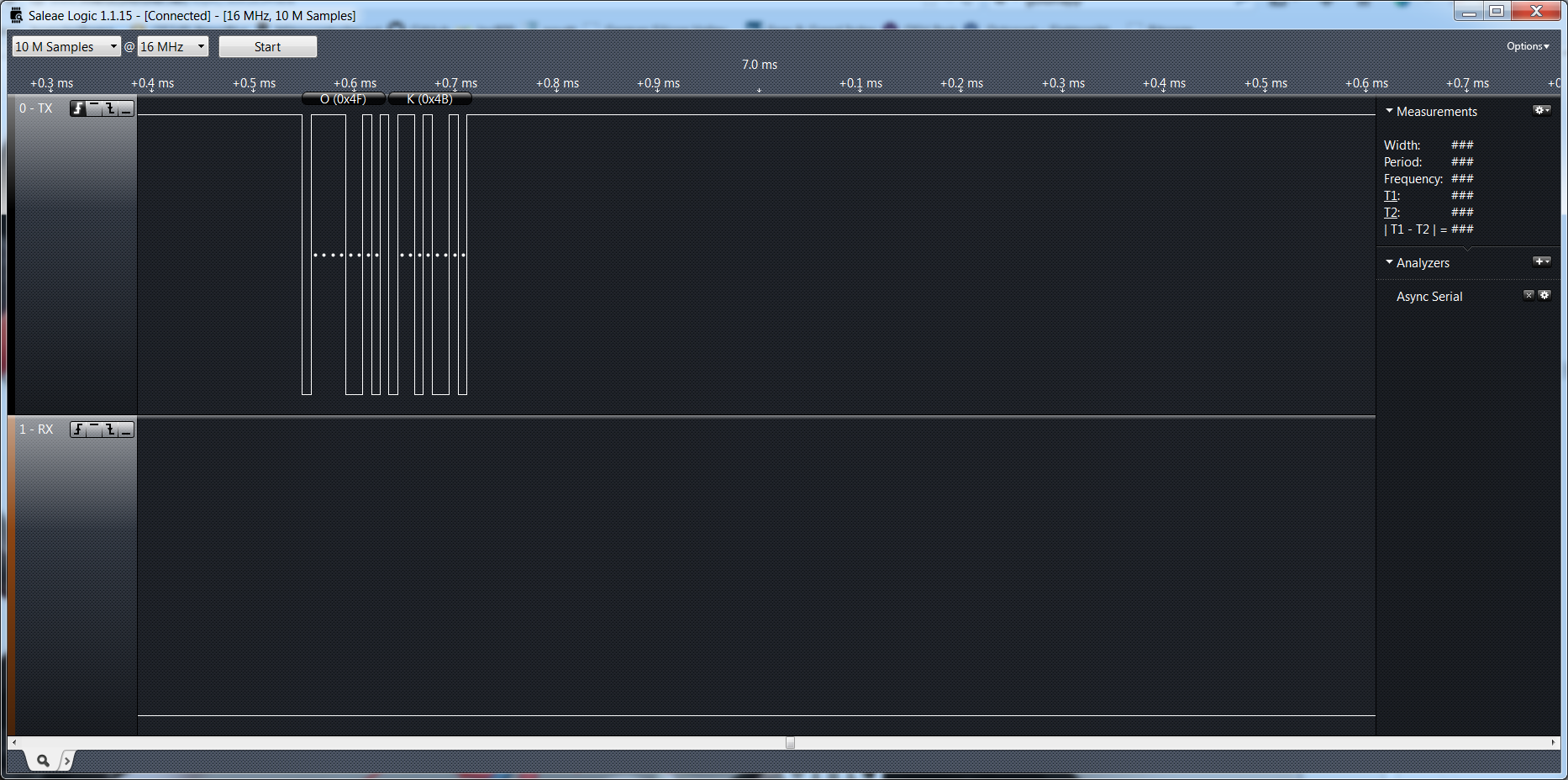
Ich habe jetzt einmal den seriellen Port auf dem Board "angezapft". Interessanterweise werden nach dem Einschalten tatsächlich Daten ausgegeben, und zwar "LF36\n\r" und "OK" 6.5ms später. (115200 baud, 8N1). Anscheinend handelt es sich um Debugginginformationen der Firmware. Auf Dateneingaben reagiert er nicht. Ich habe auch die ISP-SOftware von Nuvoton am seriellen ausprobiert. Leider bekomme er keine Verbindung. Evtl. muss erst der Bootloader auf andere Weise aktiviert werden, sofern er überhaupt vorhanden ist. Den SWD-Port werde ich mir vornehmen, sobald Keil µvision richtig funktioniert. Der MINI54ZAN ist in der Device Database vorhanden (File->Device Database). In "Project->Select Device for Target" kann ich ihn aber nicht auswählen? Was soll das? Ist da schon jemand weiter?
:
Bearbeitet durch User
Torsten C. schrieb: > Tim . schrieb: >> Channel-Hopping habe ich nicht implementiert > > Von wem werden denn die neuen Kanäle festgelegt? Von der Fernsteuerung > oder vom Quadkopter? Nach "Sender" oder "Empfänger" kann man ja hier > nicht unterscheiden. Die Fernbedienung "hüpft" nach einen vorgegebenen Schema durch die Kanäle und der Quadcopter muss nach gleichem Algorithmus folgen. Die Sequenz wird dabei durch die ID der Fernbedienung festgelegt, welche in jedem Datenpacket mitgesendet wird. Dadurch werden Kollisionen verhindert. Von bidirektionaler Verbindung kann allerdings nicht die Rede sein. Die FB sendet einfach ohne Rücksicht auf Verlust. Es wird noch nicht einmal die integrierte Auto-Acknowledge Funktion des Tranceivers verwendet.
Tim . schrieb: > Ich habe jetzt einmal den seriellen Port auf dem Board "angezapft". > Interessanterweise werden nach dem Einschalten tatsächlich Daten > ausgegeben, und zwar "LF36\n\r" und "OK" 6.5ms später. (115200 baud, > 8N1). Anscheinend handelt es sich um Debugginginformationen der > Firmware. Auf Dateneingaben reagiert er nicht. > > Ich habe auch die ISP-SOftware von Nuvoton am seriellen ausprobiert. > Leider bekomme er keine Verbindung. Evtl. muss erst der Bootloader auf > andere Weise aktiviert werden, sofern er überhaupt vorhanden ist. > > Den SWD-Port werde ich mir vornehmen, sobald Keil µvision richtig > funktioniert. Der MINI54ZAN ist in der Device Database vorhanden > (File->Device Database). In "Project->Select Device for Target" kann ich > ihn aber nicht auswählen? Was soll das? Ist da schon jemand weiter? Weiß nicht ob du das PDF mal kurz angesehen hast. Jedenfalls verwenden die bei Nuvoton irgendwie das generische Cortex M0 Device. ... Ich hab hier mal eine Anleitung für eine andere Nuvoton Serie gefunden. http://webshop.atlantikelektronik.de/Webpage/NUC1x... Sieht wohl so aus, als müsste man Nuvoton MCUs als generische ARM MCUs behandeln (im Fall des MINI54ZAN ein generischer Cortex M0). Wie es allerdings dann mit den spezifischen Settings aussieht, weiß ich auch noch nicht...
Manuel Steiner schrieb: > Weiß nicht ob du das PDF mal kurz angesehen hast. Jedenfalls verwenden > die bei Nuvoton irgendwie das generische Cortex M0 Device. > > ... > > Ich hab hier mal eine Anleitung für eine andere Nuvoton Serie gefunden. > > http://webshop.atlantikelektronik.de/Webpage/NUC1x... > Hi Manuel, Danke! Ich hätte erwähnen sollen, dass ich die Anleitung schon gesehen habe. Die Anleitung ist allerdings von Jan 2010. Ich hatte gehofft, dass der Support inzwischen besser ist, insbesondere da die MCU tatsächlich in der Datenbank auftaucht. Nach der alten Variante muss man fast alles per Hand einstellen. Wäre blöd die Arbeit doppelt zu machen, wenn es auch einfacher geht. Hier der Eintrag:
1 | BOOK0=DATASHTS\Nuvoton\M051Series\M051_Series_Technical_Reference_Manual_EN_V2.0.pdf("Reference Manual")
|
2 | BOOK1=datashts\arm\cortex_m0\r0p0\DDI0432C_CORTEX_M0_R0P0_TRM.PDF("Technical Reference Manual")
|
3 | BOOK2=datashts\arm\cortex_m0\r0p0\DUI0497A_CORTEX_M0_R0P0_GENERIC_UG.PDF("Generic User Guide")
|
4 | CPU=IRAM(0x20000000-0x20000FFF) IROM(0-0x03FFF) CLOCK(12000000) CPUTYPE("Cortex-M0")
|
5 | FLDLL=UL2CM3(-O206 -S0 -C0 -FO7 -FD20000000 -FC800 -FN1 -FF0NU_M054_AP_16 -FS00 -FL04000) |
6 | MON=SARMCM3.DLL("") TARMCM1.DLL("-pCM0")
|
7 | REGFILE=M051Series.h("Nuvoton\M051Series")
|
8 | SFILE="STARTUP\Nuvoton\M051Series\startup_M051Series.s" ("Nuvoton M051 Series Startup Code")
|
9 | SIM=SARMCM3.DLL("") DARMCM1.DLL("-pCM0")
|
10 | SVD=SFD\Nuvoton\M051Series\M051AN.SFR |
Torsten C. schrieb: > der_leser schrieb: >> was soll man dann daran ändern wollen? Das fliegt doch schon... > > Zunächst denke ich, dass an der Flugstabilisierung noch einiges getan > werden kann, denn ich schrieb: >> Beim Steuern verliert er an Höhe, … > > Accel_Z wird zwar offenbar für die Regelung benutzt, aber die Regler > sind m.E suboptimal ausgelegt. > > Aber die Frage ist natürlich in sofern berechtigt, als dass es noch gar > kein "Brainstorming" hier gab, was man noch alles machen könnte. > > Fernsteuerung über Bluetooth (größere Entfernung oder auch vom Handy > aus) kam ja bisher nicht so gut an ^^. > > Man könnte noch vorprogrammierte Kunstflugfiguren vorsehen und Ausgänge, > um die Kamera zu steuern (Foto und Film Start/Stopp). > > Ein GPS-Empfänger ist vermutlich schon zu schwer, zumindest die 8€-Teile > aus China. > > Gibt's sonst noch Ideen? Die Ideenliste gefällt mir. Ich glaube eine Automatische Haltefunktion wäre die interessanteste Ergänzung. Ultraschall bietet sich dabei ein. Vielleicht hilft ein Kompass oder ein Drucksensor ja auch? Dann wäre es natürlich spannend das Ding vom PC aus zu kontrollieren. Ich glaube das lässt sich von den genannten Dingen fast am einfachsten realisieren. Mir persönlich geht es einfach auch darum ein komplettes System zum lernen zu haben. Am Quadrocopter ist vieles dran, was gerade in embeeded Sytems wichtig ist: Datenübertragung per 2.4Ghz, Inertialsensoren, Motorcontroller, Regelschleifen usw..
:
Bearbeitet durch User
Ich habe jetzt die Nuvoton Keil-Treiber installiert. http://download.nuvoton.com/NuvotonMOSS/DownloadService/Member/DocumentsInfo.aspx?tp_GUID=SW0520101208200142 Dieser hat auch MCUs zur Datenbank hinzugefügt. Allerdings kann ich die immer noch nicht auswählen. Die Beispielprojekte lassen sich öffnen, aber ich kann die Target-CPU nicht ändern. Vielleicht ein Kompatibilitätsproblem zwischen µvision 4 und 5? Ärgerlich.
Ok, Problem gefunden: Keil hat in der µVision 5 ein neues System
("Software Packs") für den Support von Devices eingeführt. Im neuen
System werden erst sehr wenige Controller unterstützt:
http://www.keil.com/dd2/Pack/
Für allen alten Controller muss man den Legacy support installieren:
http://www2.keil.com/mdk5/legacy/
Jetzt kennt er auch den MINI54ZAN!
Werde mich demnächst mal dran machen.
:
Bearbeitet durch User
Wow, hier ist ja was los! Marius S. schrieb: > wie genau man das realisieren soll weiss ich nicht Zwei Dinge: - Erstens die Motordrehzahlen so steuern, dass der Effekt kaum auftritt. - Zweitens den Proportional- und Integralteil von Accel_Z vom MPU-6050 anpassen No y. schrieb: > Der copter fängt erst an mit den LEDs zu blinken... dann geht er ... ... langsam in den Sinkflug, würde ich sagen. Und/oder: Tim . schrieb: > Von bidirektionaler Verbindung kann allerdings nicht die Rede sein. Entweder man nimmt für den Rückkanal einen separaten Empfänger oder muss auch noch die FB hacken, damit der SOC ("state-of-charge") empfangen und angezeigt wird. Sensoren (Strom und Spannung) für die SOC-Messung müssten dann natürlich rein. Aber dafür gibt's ja fertige 1-Chip-Lösungen. Manuel Steiner schrieb: > Wenn ich Zeit habe, werde ich mal testen, wie sich das mit > unterschiedlichen Bodenbeschaffenheiten verhält. Danke, das interessiert mich sehr! Tim . schrieb: > Ultraschall bietet sich dabei an. Die 1€-Ultraschallsensoren aus China wiegen 8,3 Gramm und reichen von 60mm bis max. 4700mm: HC-SR04. Also bis zur Zimmerdecke gibt's sichere Messwerte. Tim . schrieb: > Vielleicht hilft ein Kompass oder ein Drucksensor ja auch? Kompass: Hilft m.E. nur beim Gierwinkel, der ist aber nun wirklich schon jetzt super stabil. Drucksensoren sind recht ungenau (vielleicht 50..500cm?), das bringt wohl leider nicht viel. Tim . schrieb: > Dann wäre es natürlich spannend das Ding vom PC aus zu kontrollieren. Den Hintergedanken hatte ich bei Bluetooth ^^ auch. Neben mehr Reichweite hat man auch den Rückkanal für den SOC ^^ und für Fotos vom Parkplatz. ^^ Tim . schrieb: > Mir persönlich geht es einfach auch darum ein komplettes System zum > lernen zu haben. Ich denke, das ist eigentlich die treffenste Antwort auf die Frage von "der_leser". Wo bekommt man schon für 20€ eine so spannende Lernumgebung?
Torsten C. schrieb: > Tim . schrieb: >> Von bidirektionaler Verbindung kann allerdings nicht die Rede sein. > > Entweder man nimmt für den Rückkanal einen separaten Empfänger oder muss > auch noch die FB hacken, damit der SOC ("state-of-charge") empfangen und > angezeigt wird. Sensoren (Strom und Spannung) für die SOC-Messung > müssten dann natürlich rein. Aber dafür gibt's ja fertige > 1-Chip-Lösungen. [Edit: verlesen] Ja, die Fernbedienung müsste man dann auch hacken. Kann jemand ein Bild des Controllers machen? War auch von Nuvoton, ich kenne den Typen allerdings nicht.
:
Bearbeitet durch User
Hatte die schonmal zerlegt, die Bezeichnung hat bei mir mit googles Hilfe absoulut keine Ergebnisse gebracht. Nur der große Nuvoton Schriftzug ist sinnvoll.
Angehängte Dateien:
-

MPL3115A2_test.png
100 KB

Torsten C. schrieb: > Tim . schrieb: >> Ultraschall bietet sich dabei an. > > Die 1€-Ultraschallsensoren aus China wiegen 8,3 Gramm und reichen von > 60mm bis max. 4700mm: HC-SR04. Also bis zur Zimmerdecke gibt's sichere > Messwerte. Ich habe mit den billig dingern eher andere Erfahrung gemacht. Entweder sie spuckten nur max ~70cm aus oder lieferten bei größeren Entfernungen unsinnige Ergebnisse. Keine Ahnung ob das bei den "teureren" Modulen besser ist. > Tim . schrieb: > Drucksensoren sind recht ungenau (vielleicht 50..500cm?), das bringt > wohl leider nicht viel. Also ich verwende für meinen selbstgebauten Quadcopter den MPL3115A2. Der hat eine Auflösung von 0,3m bzw. 1,5 Pa. In der Praxis lässt sich mit Oversampling und ein bisschen Filtern so 50cm rausbekommen. Anbei mal Messungen die ich mit dem Ding zu Hause gemacht habe. Es ist also durchaus brauchbar. Ganz praktisch ist, dass man das teil bereits kompensierte Messwerte rausgibt (also nicht wie beim alten MPL115A2 bei dem man noch selbst die Koeffizienten und Temperatur über ein Polynom schicken musste). Zudem bekommt man bei der Eingabe des Luftdrucks auf NN auch direkt die Höhe in Metern raus. In der Praxis Pendelt der Copter dann so um 1m herum und man muss natürluch bedenken dass der Luftdruck sich auch innerhalb von ein paar Minuten so weit ändern kann, dass der Copter dann bereits einige Meter zu hoch oder zu niedrig ist. Hier könnte ein weiterer Luftdrucksensor in der Fernbedienung, der seinen Wert dann ebenfalls an den Copter sendet Abhilfe schaffen. So kann man praktisch die Differenzhöhe zwischen Copter und Fernbedienung recht konstant halten. Das wollte ich auch nochmal testen. Und wenn man die Reichweite noch etwas erhöhen will lann man in der Fernbedienung auch den nRF24L01 PA+LNA (max. 20dBm) einbauen. Das Protokoll ist ja kompatibel nur ist die Sendeleistung dann höher. Allerdings darf man hier in Deutschland IMHO nicht die 20dBm ohne FHSS/DSSS benutzen. Aber selbst mit 10mW kommt man schon ne Ecke weiter.
Timmo H. schrieb: > lieferten bei größeren Entfernungen unsinnige Ergebnisse Ohne Filtern und plausibilisieren geht's gar nicht, klar. Das liegt an der Physik (nicht immer rechte Winkel, Multiechos, ...). Aber dass unsere Ergebnisse so unterschiedlich sind, wundert mich. Ich habe auch nur die billigen. Beste Ergebnisse erhielt ich mit 'ner Plexiglas- Platte (Strukturglas) mit dem Muster "Pyramid" vom Baumarkt. Ein Blumenbeet z.B. gibt naturgemäß schlechtere Werte. Daher bin auch ich von Ultraschall nicht so begeistert. Aber Luftdruck (50..100cm) empfinde ich als unbrauchbar. Bevor ich den Luftdruck per Funk sende, sende ich lieber DGPS-Daten. Damit habe ich nicht nur die Höhe genauer. Nur fehlt mir noch eine NMEA-Quelle mit geringer Masse. PS: Mit Ultraschall würde ich gegen die Zimmerdecke messen, nicht gegen den Fußboden und das was drauf steht (Tische, Stühle, Personen, ...).
:
Bearbeitet durch User
Torsten C. schrieb: > eine NMEA-Quelle mit geringer Masse Teuer aber 16 Gramm leicht: http://www.multiplex-rc.de/fileadmin/content/dateien/downloads/zr_gps_sensor_110214_5sp.pdf Kennt jemand 'ne preiswertere Alternative?
Torsten C. schrieb: > Daher bin auch ich von Ultraschall nicht so begeistert. Aber Luftdruck > (50..100cm) empfinde ich als unbrauchbar. Hängt davon ab. Für einen größeren Copter mit dem man draußen fliegt ist das ausreichend. > Bevor ich den Luftdruck per Funk sende, sende ich lieber DGPS-Daten. > Damit habe ich nicht nur die Höhe genauer. Naja die zwei Byte haben in in meinen 32 Byte nRF Datenpaketen schon noch übrig. Ich sende mit 100 Hz alle 7 Poti-Werte (je als 16 bit) und Taster meiner 9-Kanal Fernsteuerung. Da habe ich noch genug übrig. Von Copter zur Fernbedienung sende ich mit 10 Hz (Höhe, Lage, Batteriespannung...). > Nur fehlt mir noch eine > NMEA-Quelle mit geringer Masse. Also selbst die kleinen GPS Module die ich verwende (Maestro A2235-H) sind mit 4g zwar noch relativ leicht, aber für einen 38g Copter immerhin schon 10% mehr. Zudem halte ich GPS für so einen kleinen Copter eh für etwas übertrieben.
:
Bearbeitet durch User
Meine Meinung zum Luftdruck bezog sich auch auf meinen Honey Bee King 3 (HBK3). Timmo H. schrieb: > Für einen größeren Copter mit dem man draußen fliegt ist > das ausreichend. Das artet in eine Geschmackfrage aus, da werden wir uns nie einig. ;-) Timmo H. schrieb: > Naja die zwei Byte haben in in meinen 32 Byte nRF Datenpaketen > schon noch … … übrig? DGPS sind ja nun auch nicht wirklich viele Bytes. Im Grunde reicht ja ein Byte pro Achse (X/Y/Z), also drei Bytes. Oder 10 Bit pro Achse, macht 4 Bytes. Genauer ist DGPS eh nicht. Timmo H. schrieb: > Maestro A2235-H … mit 4g Falls Du untertrieben haben solltest: Kein Problem. Aber der "VK16U6" für 11€ aus China wiegt 12 Gramm (hatte ich mir schwerer vorgestellt). Da ist das Teil von Multiplex ja richtig schwer. (Wieso eigentlich? Sieht viel leichter aus.) Falls Du die 4g bitte nochmal bestätigen kannst, bedanke ich mich ganz herzlich und kaufe ich den! Kostet zwar soviel wie der QKopter, aber ich will ihn ja nicht unbedingt gleichzeitig im HBK3 und im QKopter haben. PS: Timmo H. schrieb: > Zudem halte ich GPS für so einen kleinen Copter eh für > etwas übertrieben. Welches Verhältnis hältst Du für übertrieben? Programmieraufwand, Preis, Gewicht, Nutzen, ...? Mich interessiert die Antwort wirklich, z.B. im Vergleich zu einer Kamera. Vielleicht bin ich ja auf dem Holzweg.
:
Bearbeitet durch User
Timmo H. schrieb: > Torsten C. schrieb: >> Daher bin auch ich von Ultraschall nicht so begeistert. Aber Luftdruck >> (50..100cm) empfinde ich als unbrauchbar. > Hängt davon ab. Für einen größeren Copter mit dem man draußen fliegt ist > das ausreichend. Wenn überhaupt – der Luftdruck ändert sich mit der Strömungsgeschwindigkeit, und damit vermutlich mit jeder Änderung der Rotordrehzahl oder Geschwindigkeit des Kopters.
Torsten C. schrieb: > > Timmo H. schrieb: >> Maestro A2235-H … mit 4g > > Falls Du untertrieben haben solltest: Kein Problem. Aber der "VK16U6" > für 11€ aus China wiegt 12 Gramm (hatte ich mir schwerer vorgestellt). Naja das ist das was im Datenblatt steht. > Falls Du die 4g bitte nochmal bestätigen kannst, bedanke ich mich ganz > herzlich und kaufe ich den! Naja, meine "hochgenaue" Küchenwaage sagt 5g :D > Kostet zwar soviel wie der QKopter, 11,90€ bei Mouser (exkl. MwSt) > Timmo H. schrieb: >> Zudem halte ich GPS für so einen kleinen Copter eh für >> etwas übertrieben. > > Welches Verhältnis hältst Du für übertrieben? Programmieraufwand, Preis, > Gewicht, Nutzen, ...? Mich interessiert die Antwort wirklich, z.B. im > Vergleich zu einer Kamera. Vielleicht bin ich ja auf dem Holzweg. Eher Nutzen. Mit so einem kleinen Copter kann man ja nicht so die wahnsinns Strecken aufgrund der begrenzten Geschwindigkeit und Flugdauer erreichen. Bei einem größeren Copter mit einer Vernünftigen Kamera kann es ja durchaus Sinnvoll sein die Position für 10-15 Minuten zu halten oder Coming Home bei schwachem Akku. Schnallt man aber auf den Winzling eine Kamera und GPS Modul dann ist die Flugzeit ja schon fast verstrichen bis er die Position erreicht hat (und heile nach unten muss er dann ja auch wieder). Oder was hattest du mit GPS bei dem Ding vor?
:
Bearbeitet durch User
Moritz A. schrieb: > und damit vermutlich mit jeder Änderung der > Rotordrehzahl oder Geschwindigkeit des Kopters. Ja, aber nicht die Höhe. Die Einflüsse auf die Luftdruckänderungen muss man natürlich heraus rechnen. Timmo H. schrieb: > Naja, meine "hochgenaue" Küchenwaage sagt 5g Geil! Danke. Timmo H. schrieb: > Oder was hattest du mit GPS bei dem Ding vor? Torsten C. schrieb: > Ich überlege immer noch, ob ich mir so ein Projekt ins Haus hole. An dieser Stelle nochmal vielen Dank für die informativen Beiträge. Wenn die SWD-Schnittstelle vom Disco ^^ funktioniert, dann habe ich ein neues Projekt. Nach oben eine 4-Pin-Buchsenleiste für - HC-SR04 für Indoor oder - GPS für Outdoor Unten drunter 'ne Handy-Kamera. Funk: Bidirektional, mit Bildübertragung. Härtetest: Bild vom Parkplatz übertragen und zurück zum Schiebedach des Autos finden. Ich habe mir viel vorgenommen, aber wenn der zweite QKopter von meinem Sohn da ist, wird meiner neu geflasht. Bittebitte: Lasst die SWD vom DISCO funktionieren. ;-) Timmo H. schrieb: > Flugzeit ja schon fast verstrichen bis er die Position erreicht hat OK, das werde ich testen, wenn die größeren LiPos aus China da sind (sind ja auch schwerer). Vielleicht wird ja doch nix aus meinem Projekt. PS: Hat jemand eine Ahnung, ob sich mit 'nem größeren Akku und mehr Gewicht ein anderer Propeller (Pitch/Durchmesser) lohnt? Ich habe davon keinen Plan. PPS: Und schon wieder so viele Typos, sorry:
:
Bearbeitet durch User
Angehängte Dateien:
-

pcb.jpg
150 KB -

komplett.jpg
100 KB
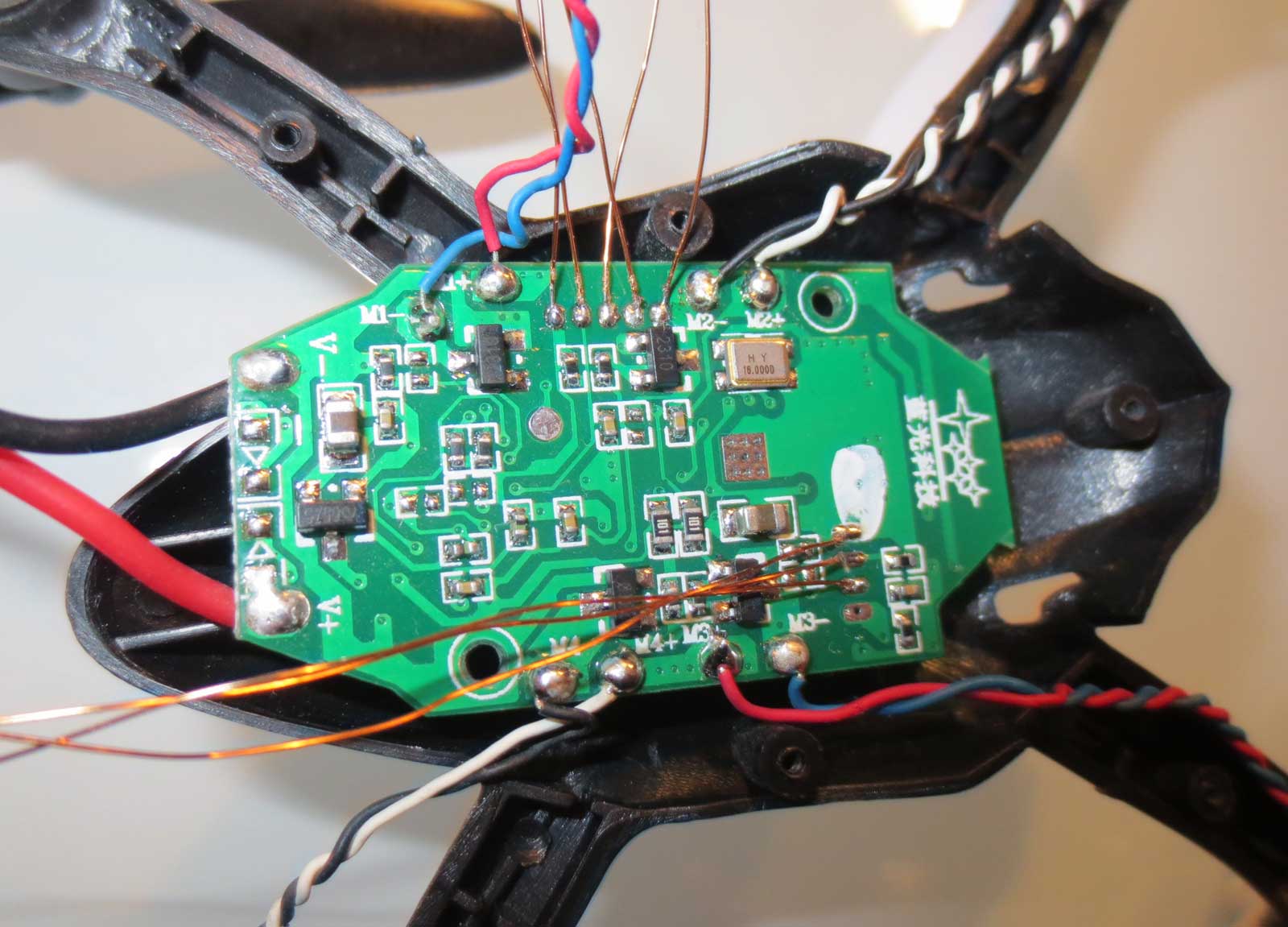
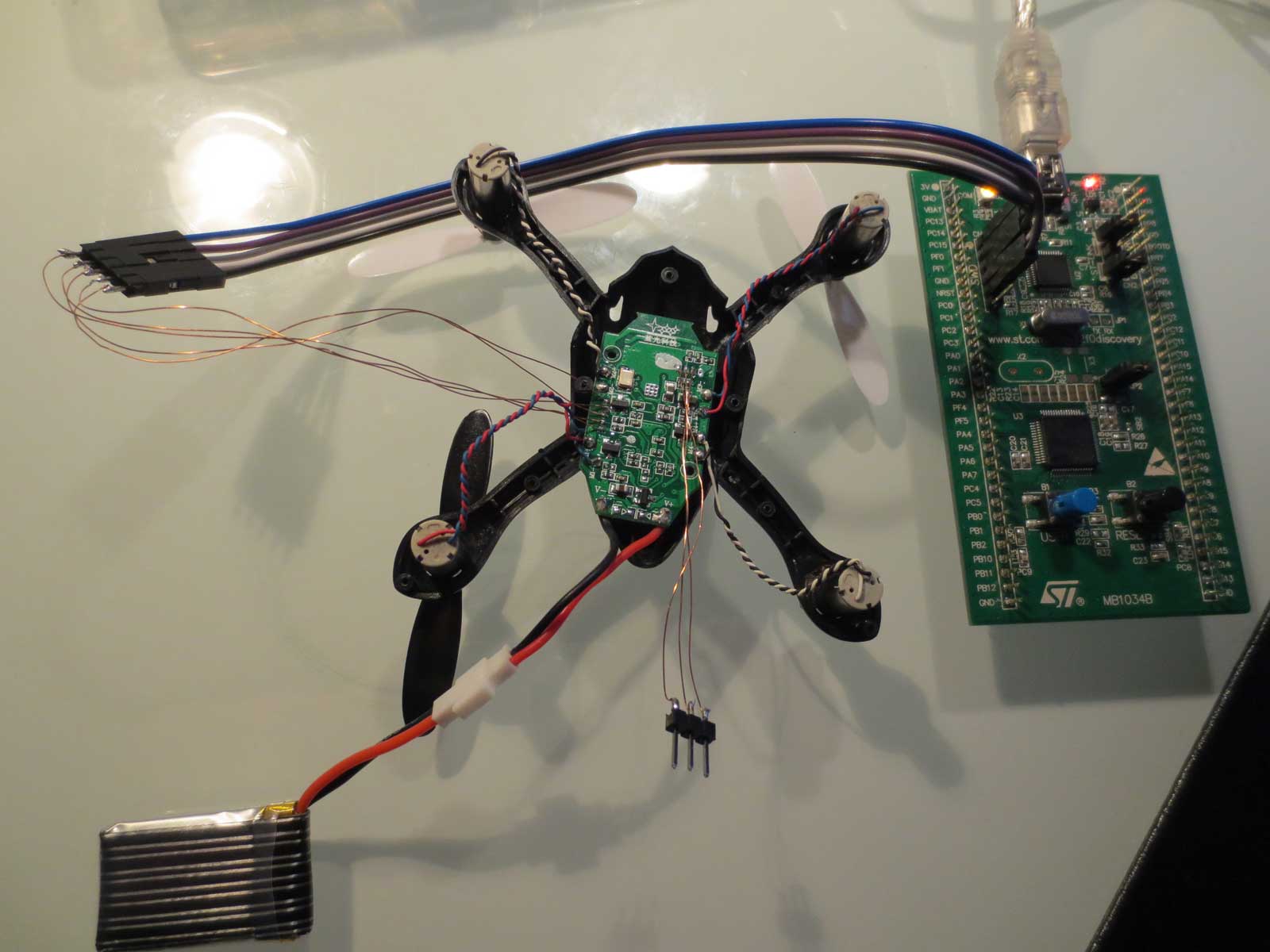
{kind=link}
Und es funktioniert!! Ich habe es geschafft über Keil und ST-Link vom Discovery board auf den SWD-Port zuzugreifen. Um in Keil ohne Sourcecode debuggen zu können, musste ich die Setting kreativ ändern. Beispielprojekt anbei. Leider ist, wie erwartet, das Lesen des Code-Flash gesperrt - alle Positionen werden als 0xff ausgelesen. Interessanterweise lässt sich aber das SRAM auslesen, welches beim Reset nicht gelöscht wird. Im Hexdump lassen sich einige bekannte Werte finden:
1 | 0x200000B0 06 2C 66 88 68 68 68 88 - 66 86 86 86 00 00 00 00 |
Die sind die RX und TX Addressen der Fernbedienung. Damit scheint der Zugriff also zuverlässig zu funktionieren. Leider kenne ich mich mit den Möglichkeiten von SWD nicht sehr gut aus. Ist es z.B. möglich, Inhalte des SRAMs oder Registerinhalte zu verändern? Wenn ja, könnte man evtl. das Flash über das SRAM auslesen. Ginge das mit GDB? Bin für alle Info dankbar. Das Neuschreiben des Flash habe ich noch nicht probiert. Ich will erst einmal die Firmware retten.
:
Bearbeitet durch User
Torsten C. schrieb: > Bittebitte: Lasst die SWD vom DISCO funktionieren. ;-) Dein Bitten scheint geholfen zu haben :)
Tim . schrieb: > Und es funktioniert!! Geil!! Danke für die Info. Dann müsste es mit CooCox doch auch gehen, oder? Tim . schrieb: > Ich will erst einmal die Firmware retten. Entweder Ich hab's nicht verstanden, oder Du hast die Frage schon selbst beantwortet: Tim . schrieb: > For DataFlash, however, it is not easy to be protected > because it can be dumped by executing a program residing in APROM BTW: Bringt eigentlich 'ne Phycomp ISM-Band Chip-Antenne zusätzliche Reichweite? PS: Halte dich mit dem "Firmware retten" nicht auf. Wenn's geht, macht das bestimmt einer und postet die hier. PPS: Neuer Titel: "Hackbarer(!!!) 21 EUR Quadcopter". ;-)
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.